ROS Learning-031 (提高篇-009 A Mobile Base-07) 控制移动平台 --- (操作)人机交互
ROS 提高篇 之 A Mobile Base-07— 控制移动平台 — (操作)人机交互我使用的虚拟机软件:VMware Workstation 11使用的Ubuntu系统:Ubuntu 14.04.4 LTSROS 版本:ROS Indigo 注意:使用键盘控制机器人:使用 ArbotiX(RViz) 控制器界面:
ROS 提高篇 之 A Mobile Base-07 — 控制移动平台 — (操作)人机交互
我使用的虚拟机软件:VMware Workstation 11
使用的Ubuntu系统:Ubuntu 14.04.4 LTS
ROS 版本:ROS Indigo
注意:
1 . ROS 提高篇这个专栏的教学有门槛。
2 . 如果你没有学习前面的教程,请想学习前面的 beginner_Tutorials 和 learning_tf 的ROS 相关教程。
一 . 准备的事情:
先开两个终端执行下面的命令行命令:(这次我们来启动 Pi 机器人吧。)
$ roslaunch rbx1_bringup fake_pi_robot.launch #或者 roslaunch rbx1_bringup fake_turtlebot.launch
$ rosrun rviz rviz -d `rospack find rbx1_nav`/sim.rviz #注意:这条指令中的'`'是键盘左上角'Esc'键下面的那个键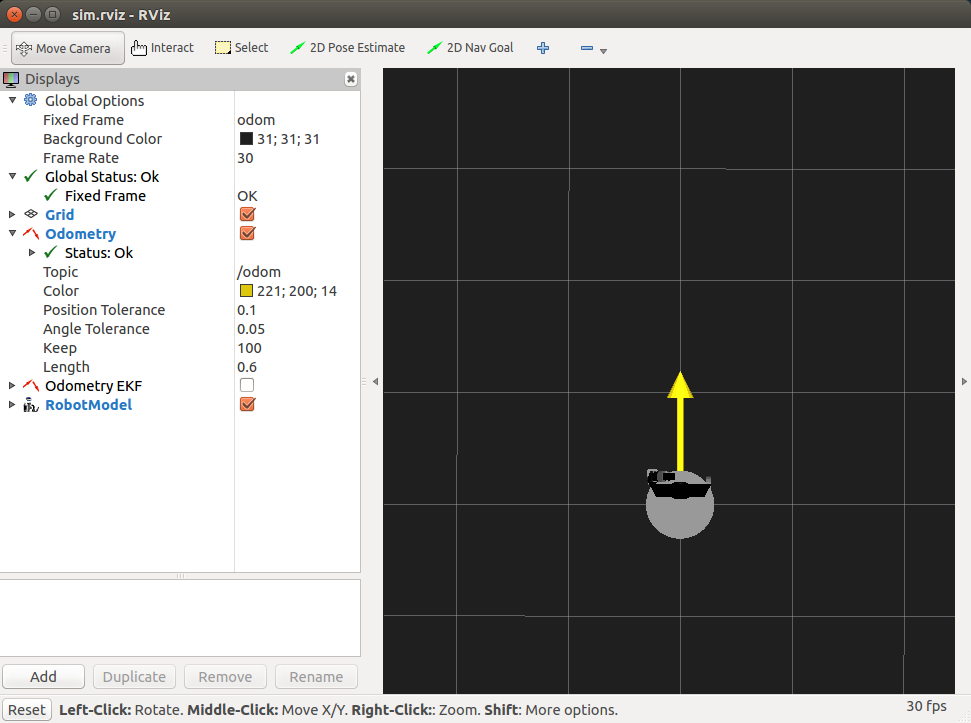
二 . 使用键盘控制机器人:
新开一个终端,执行下面的命令行命令:
$ roslaunch rbx1_nav keyboard_teleop.launch你可以再当前终端中看到下面这样输出:(不是使用键盘上的方向键了,而是使用下面输出提示的按键进行操作。)
Control Your Turtlebot!
---------------------------
Moving around:
u i o
j k l
m , .
q/z : increase/decrease max speeds by 10%
w/x : increase/decrease only linear speed by 10%
e/c : increase/decrease only angular speed by 10%
space key, k : force stop
anything else : stop smoothly
CTRL-C to quit
控制键盘上的相关按键,RViz 模拟器中的机器人跟着运动。
三 . 使用 ArbotiX(RViz) 控制器界面:
新开一个终端,执行下面的命令行命令:
$ arbotix_gui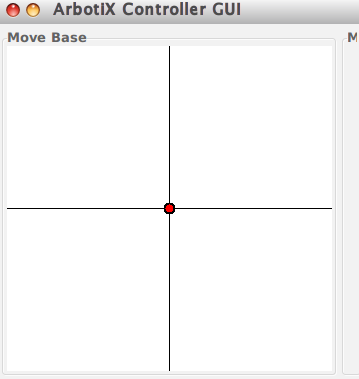
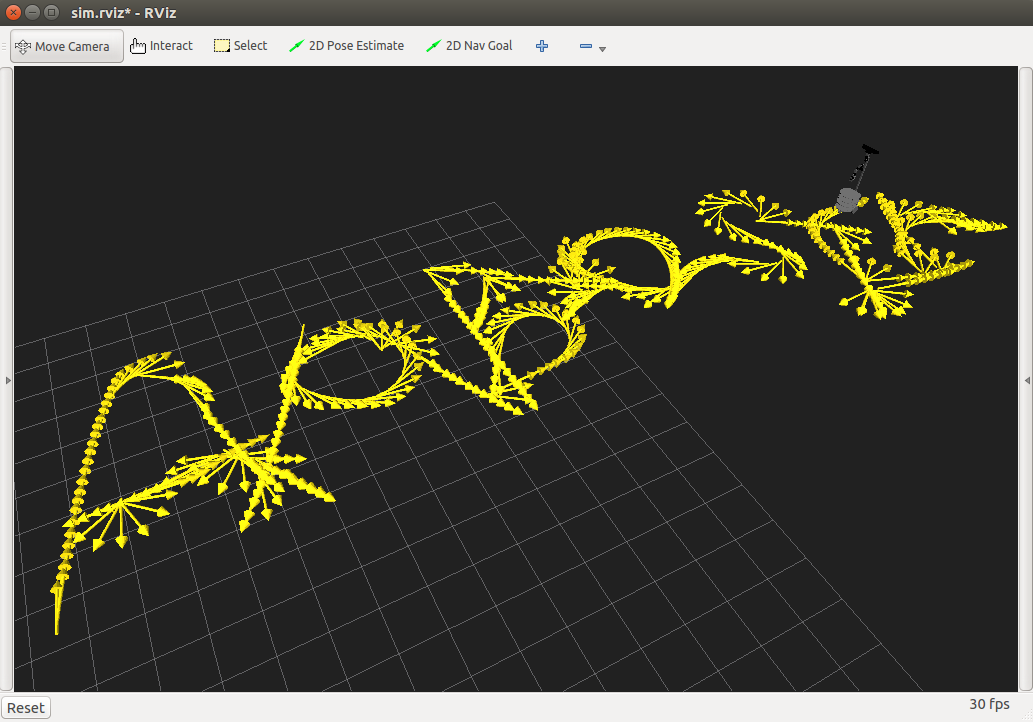
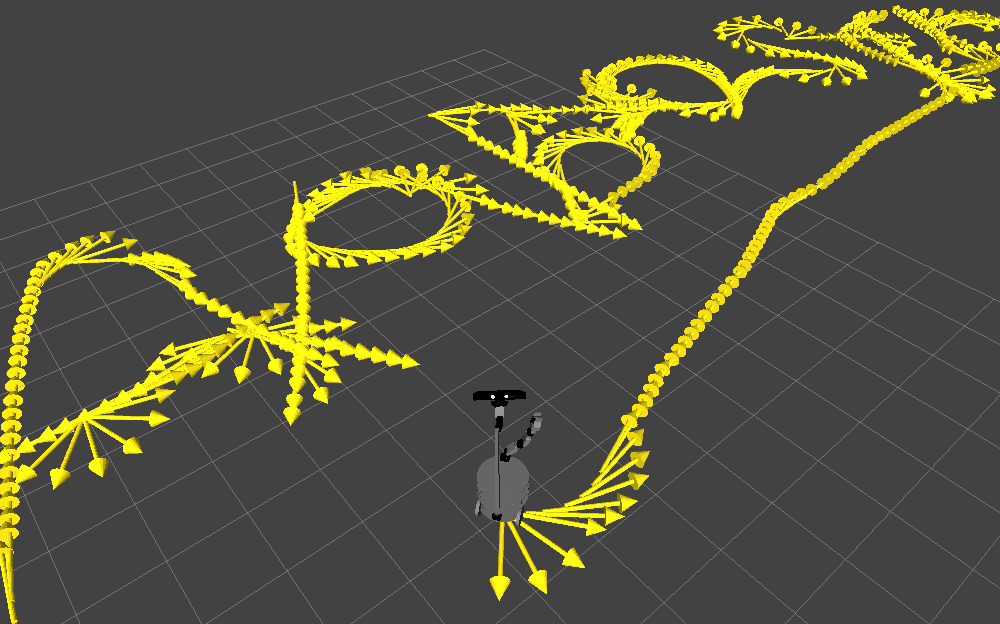
使用鼠标拖动红色小球,RViz模拟器中的机器人会跟着运动。
如果你启动的机器人是:Pi Robot机器人,那么你会看到下面样子的GUI界面:
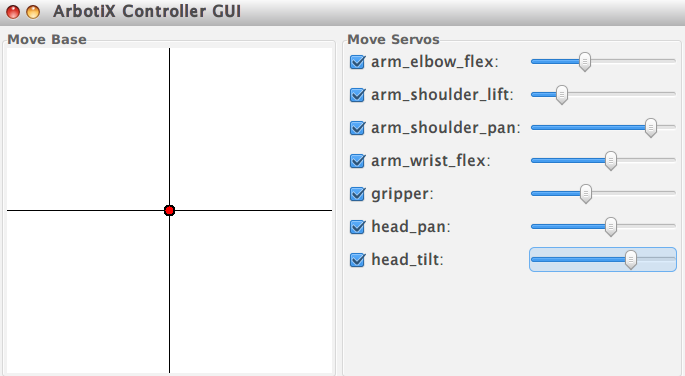
右侧的滑动条是用来控制Pi Robot手臂上的舵机的。我们来看看上面舵机控制状态下,机器人是什么样子的:
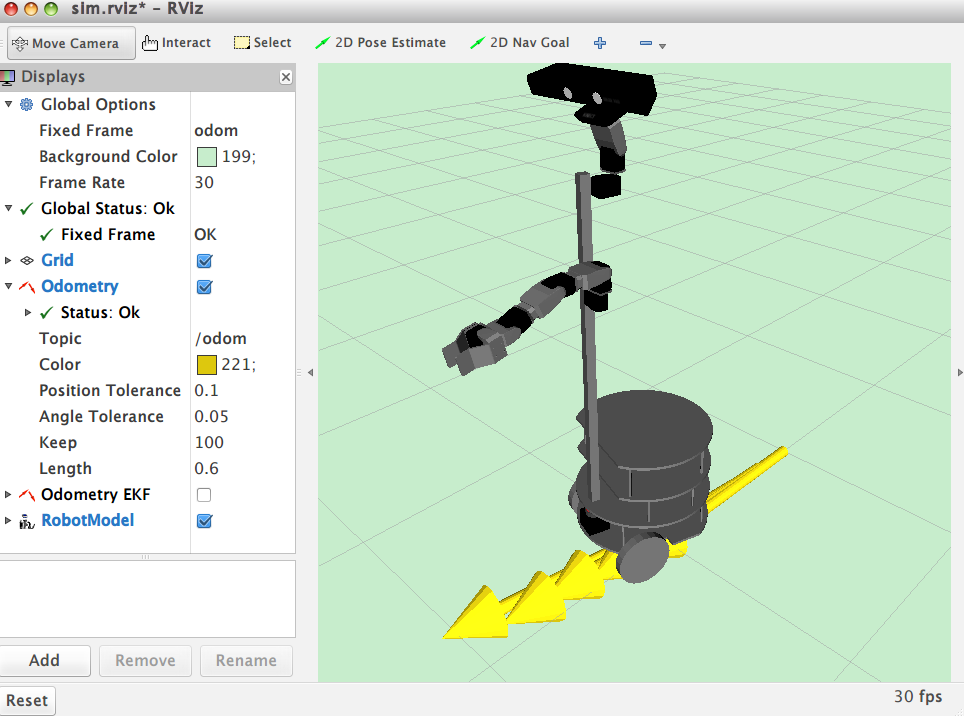
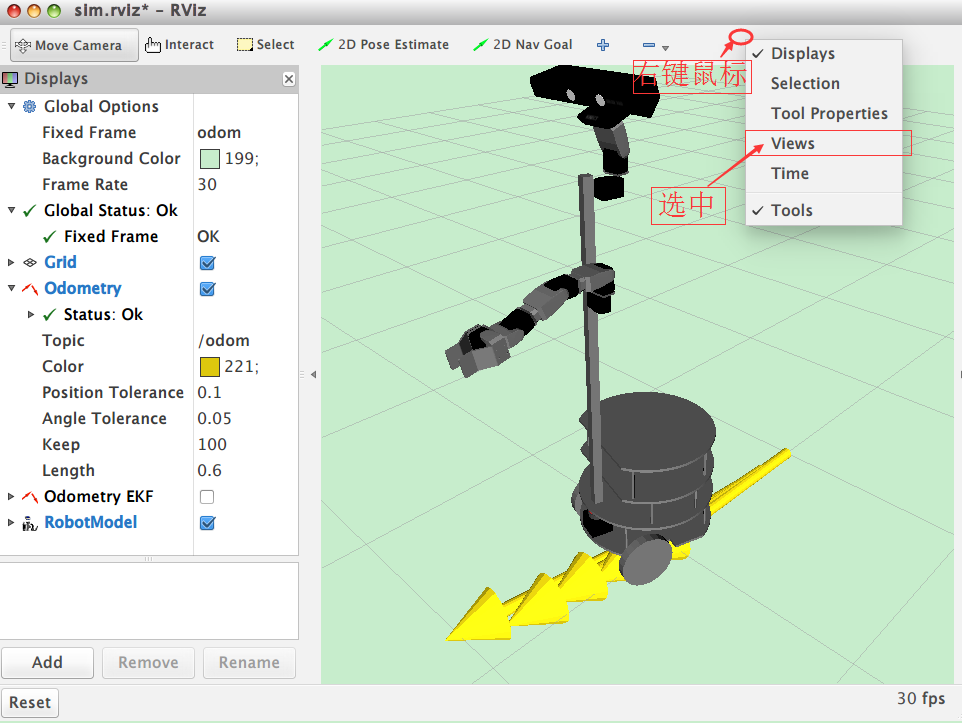
By The Way : 背景颜色我设置成了:豆沙绿,这样的颜色对眼睛好。
豆沙绿 :
R : 199
G : 237
B : 204
护眼养眼的还有一个:MM 图片。O(∩_∩)O~
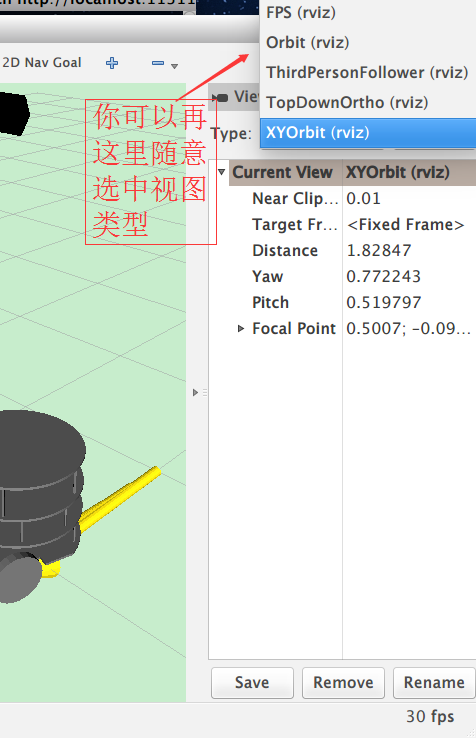
扩展,你可能会为,如果改变Rviz模拟器视图: 下面教你
搞定
这样,我们 ROS提示篇的 A Mobile Base (移动基站)这边章节的内容,我就介绍完毕了。
下一章节,我们介绍:导航、路径规划和SLAM(同步定位并重建地图)(Navigation,Path Planning and SLAM)

华为开发者空间,是为全球开发者打造的专属开发空间,汇聚了华为优质开发资源及工具,致力于让每一位开发者拥有一台云主机,基于华为根生态开发、创新。
更多推荐



 0
0 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)