ROS Learning-009 beginner_Tutorials ROS服务 和 ROS参数
ROS Indigo beginner_Tutorials-08 ROS服务 和 ROS参数我使用的虚拟机软件:VMware Workstation 11使用的Ubuntu系统:Ubuntu 14.04.4 LTSROS 版本:ROS Indigo1. 理解 ROS 服务 和 ROS 参数:服务(services)是节点之间通讯的另一种方式。服务允许节点发送请求(request) 并获得一个
ROS Indigo beginner_Tutorials-08 ROS服务 和 ROS参数
我使用的虚拟机软件:VMware Workstation 11
使用的Ubuntu系统:Ubuntu 14.04.4 LTS
ROS 版本:ROS Indigo
1. 理解 ROS 服务 和 ROS 参数:
服务(services)是节点之间通讯的另一种方式。服务允许节点发送请求(request) 并获得一个响应(response)
( 节点之间通讯的方式 : 话题(rostopic) 和 服务(rosservice) )
我们先来启动一个小海龟节点: ( 开3个终端,分别运行下面三个命令 )
$ roscore$ rosrun turtlesim turtlesim_node$ rosrun turtlesim turtle_teleop_key2. rosservice : ROS 服务命令
2.1 list :
我们使用下面的命令来看一下当前有哪些服务在运行: (重新开一个终端(Ctrl+Alt+T))
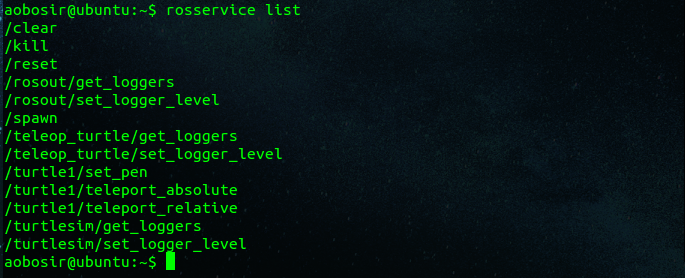
$ rosservice list输出:
/clear
/kill
/reset
/rosout/get_loggers
/rosout/set_logger_level
/spawn
/teleop_turtle/get_loggers
/teleop_turtle/set_logger_level
/turtle1/set_pen
/turtle1/teleport_absolute
/turtle1/teleport_relative
/turtlesim/get_loggers
/turtlesim/set_logger_level
如果你没事先执行
roscore命令来启动/rosout主节点,那么当你执行rosservice list命令,会输出下面的提示信息:ERROR: Unable to communicate with master!你需要先执行
roscore命令。
2.2 type :
很多服务在运行:我们来看看 /clear 这个服务的类型:
$ rosservice type /clear 输出:
std_srvs/Empty
服务的类型为空(std_srvs/Empty)。这个std_srvs/Empty是ROS系统自定义的一个变量类型或者说是一个结构体。我们如何查看这个std_srvs/Empty内究竟是什么:
$ rosmsg show std_msgs/Empty 
std_srvs/Empty 这个变量类型里面什么都没有,表示你在调用 /clear 服务时,不需要参数。 什么意思呢,下面举个例子:
2.3 call :
第一个例子: 清空小海龟窗口背景里的运行轨迹:
我们使用rosservice call 命令来调用服务:
$ rosservice call [服务名] [需要的参数] 我们来调用上面的/clear这个服务:(因为 /clear 这个服务的类型是 std_srvs/Empty (空),所以对于 /clear 这个服务,不需要参数)
$ rosservice call /clear 调用之后,回去看一看小海龟窗口的背景里的运行轨迹都没有了。 (如果你之前使用方向键让小海龟移动过。)
再来一个例子:再生一个小海龟
我们来看看再生(/spawn)这个服务:
先看看调用这个服务需要什么参数:。执行下面的组合命令:
$ rosservice type /spawn | rossrv show 输出:
float32 x
float32 y
float32 theta
string name
---
string name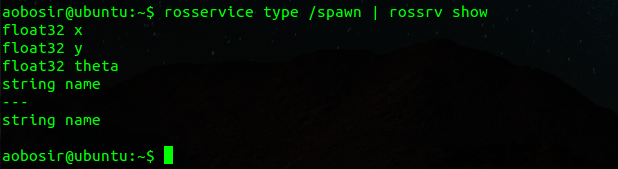
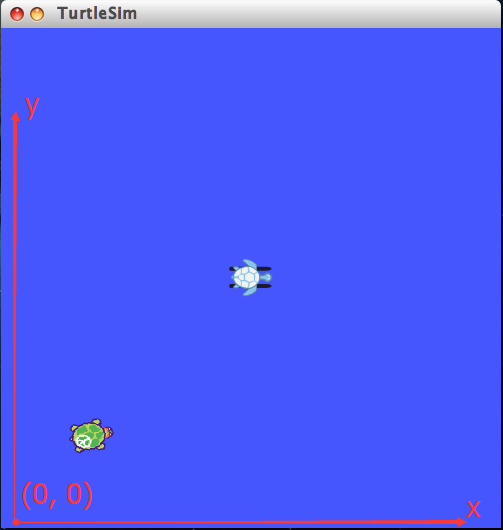
现在知道调用 /spawn 服务需要什么参数,我们就来再产生一个小海龟: (如果你将 nane 设为""(空),那么系统会自动生成一个新名字)
$ rosservice call /spawn 2 2 0.2 "" 这时,服务返回了新产生的乌龟的名字(“turtle2”)。 新产生的乌龟,如下图:

3. rosparam : ROS 参数命令 :
下面再介绍一个命令:rosparam 参数服务器
使用方法和上面的命令(rosservice)都类似:
3.1 list :
先来看一下,当前 ROS 里面有哪些参数 :
$ rosparam list 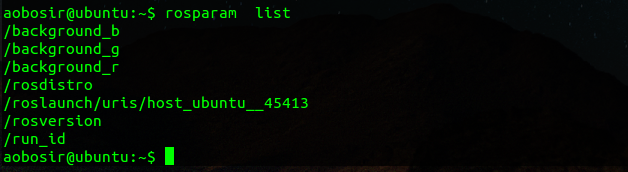
3.2 set,get :
3.2.1 set:
$ rosparam set [参数名]
$ rosparam get [参数名]如何使用,举例说明:
比如现在我改变小海龟窗口背景的颜色:
$ rosparam set /background_r 150 现在还是小海龟窗口的背景颜色不会改变的, 你必须要先 clear 一下:
$ rosservice call /clear 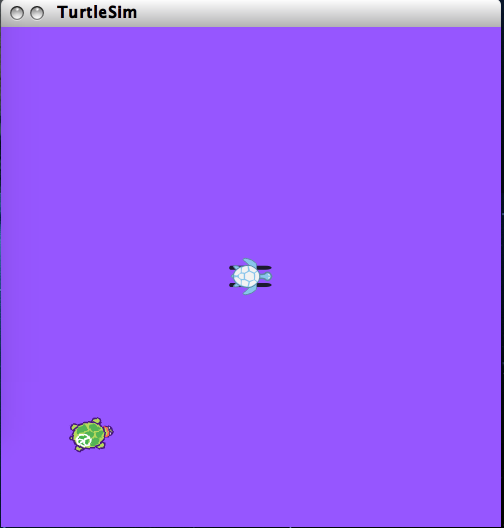
3.2.2 get:
我们使用get关键字 来得到当前参数的信息:
$ rosparam get /background_r
得到全部参数的信息:
$ rosparam get / 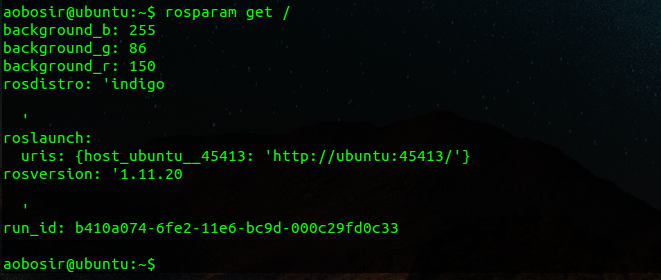
小结:
因为一个ROS机器人的启动,等同于要启动多个节点程序。也就是说,我们每次想使用键盘的方向键控制小海龟时,我们必须在3个终端中启动3个节点:
$ roscore$ rosrun turtlesim turtlesim_node$ rosrun turtlesim turtle_teleop_key这样做很麻烦,我们可不可以写一个脚本程序,将我们要运行的命令都写在一个启动脚本程序中,这样,每当我们想启动一个机器人的时候,就不需要记住一堆启动节点的命令,我们直接运行这个启动脚本程序,就可以了。所以我们下一节讲: 如何编写一个简单的启动脚本程序。

华为开发者空间,是为全球开发者打造的专属开发空间,汇聚了华为优质开发资源及工具,致力于让每一位开发者拥有一台云主机,基于华为根生态开发、创新。
更多推荐



 1
1 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)