机器人实践课程镜像虚拟机使用说明(适用于Arduino/ROS/SLAM等专业课)
虚拟机可以使镜像适用于所有系统,并且不需要额外的硬件,在此文做详细介绍。课程镜像博文链接:https://blog.csdn.net/ZhangRelay/article/details/103868465这里使用VirtualBox-6.1.4-136177-Win,请确保虚拟化支持已经打开。安装界面安装路径配置,可自定义等待安装完成...
虚拟机可以使镜像适用于所有系统,并且不需要额外的硬件,在此文做详细介绍。
课程镜像博文链接:https://blog.csdn.net/ZhangRelay/article/details/103868465
1 虚拟机安装
这里使用VirtualBox-6.1.4-136177-Win(以windows系统为例),请确保虚拟化支持已经打开。
2 镜像配置
启动虚拟机后,界面如下:

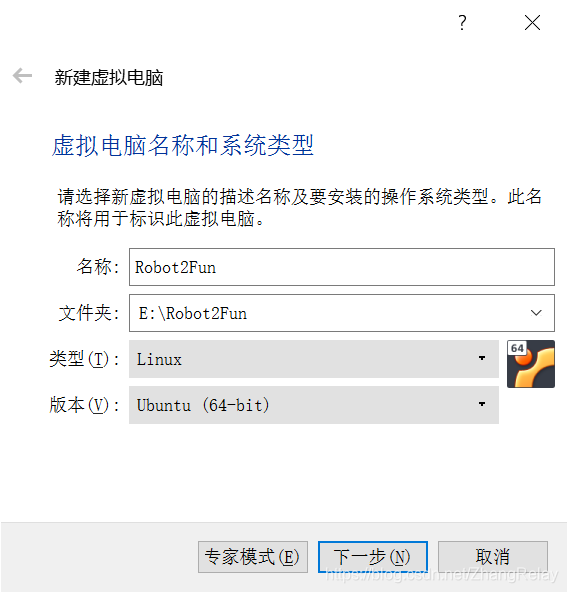
点击新建工具:
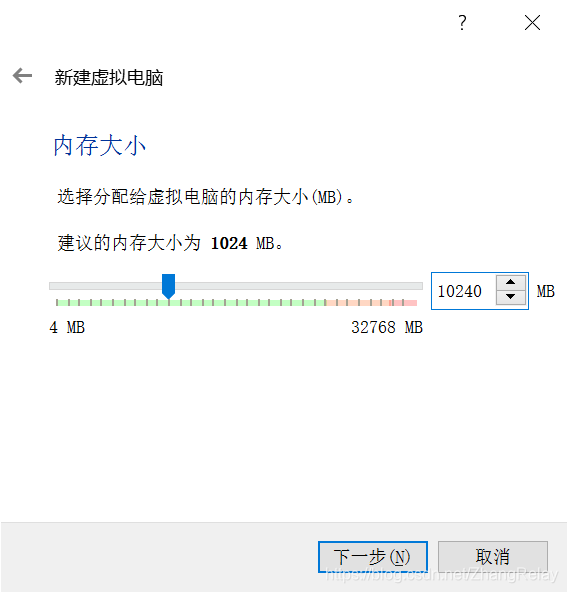
为保证流畅运行虚拟机,内存请不要吝啬,至少要大于4GB,推荐8GB以上。
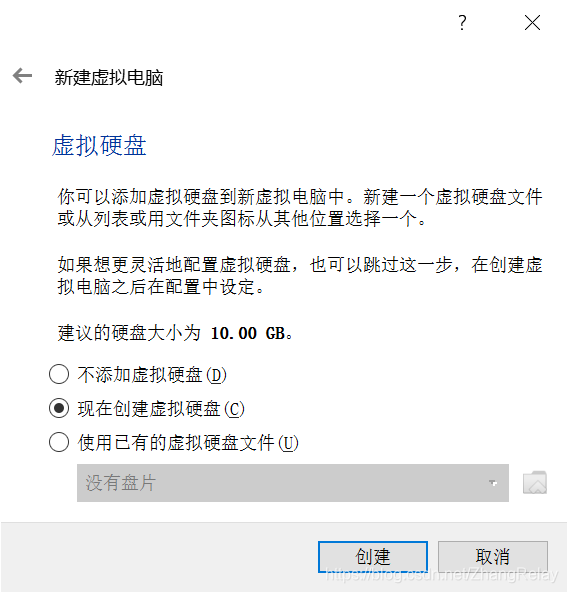

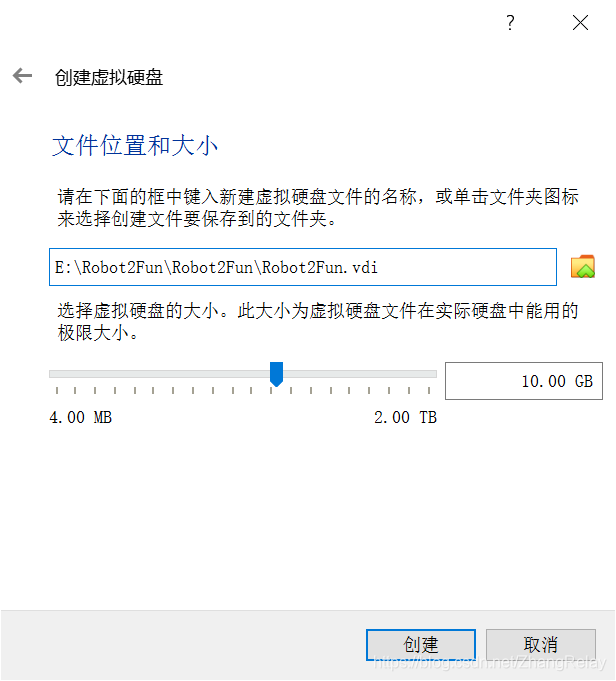
空间无需太大,几乎所有操作都在镜像中执行即可,硬盘依据需要自定义大小。
耐心等待如下过程结束:
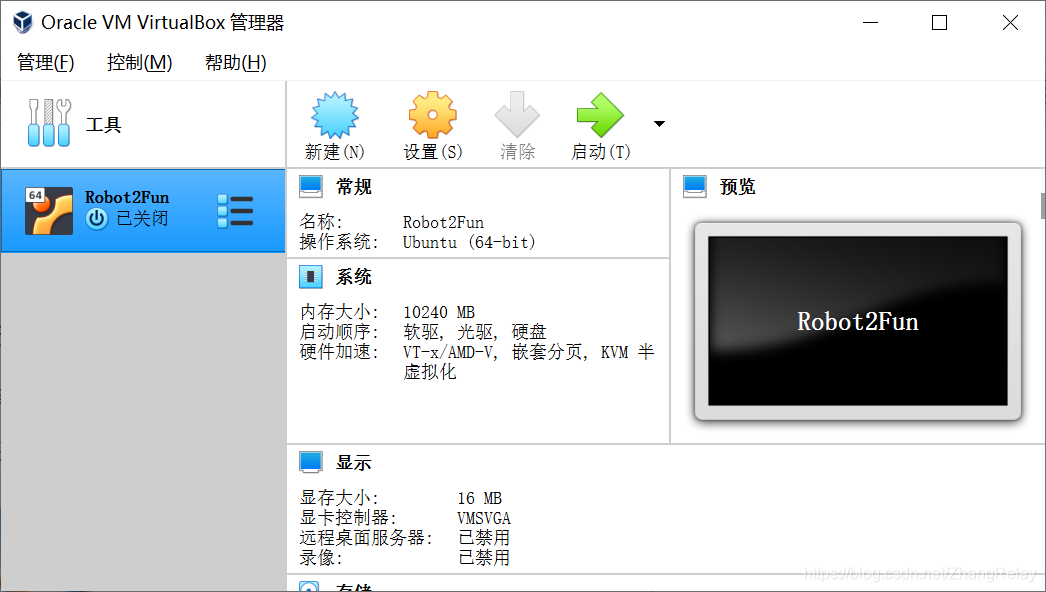
完成后,回到如下界面:
3 加载镜像
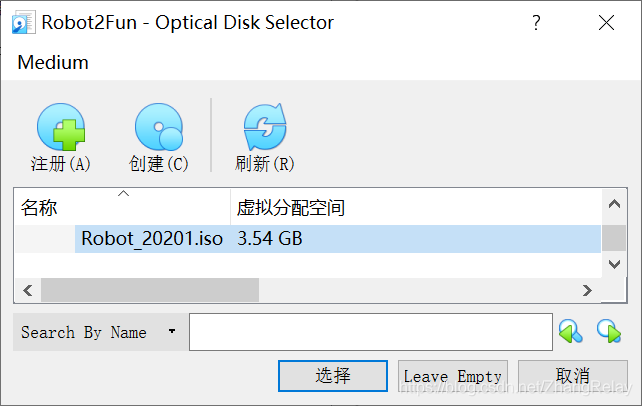
本步骤加载Robot_20201.iso镜像,
点击设置:
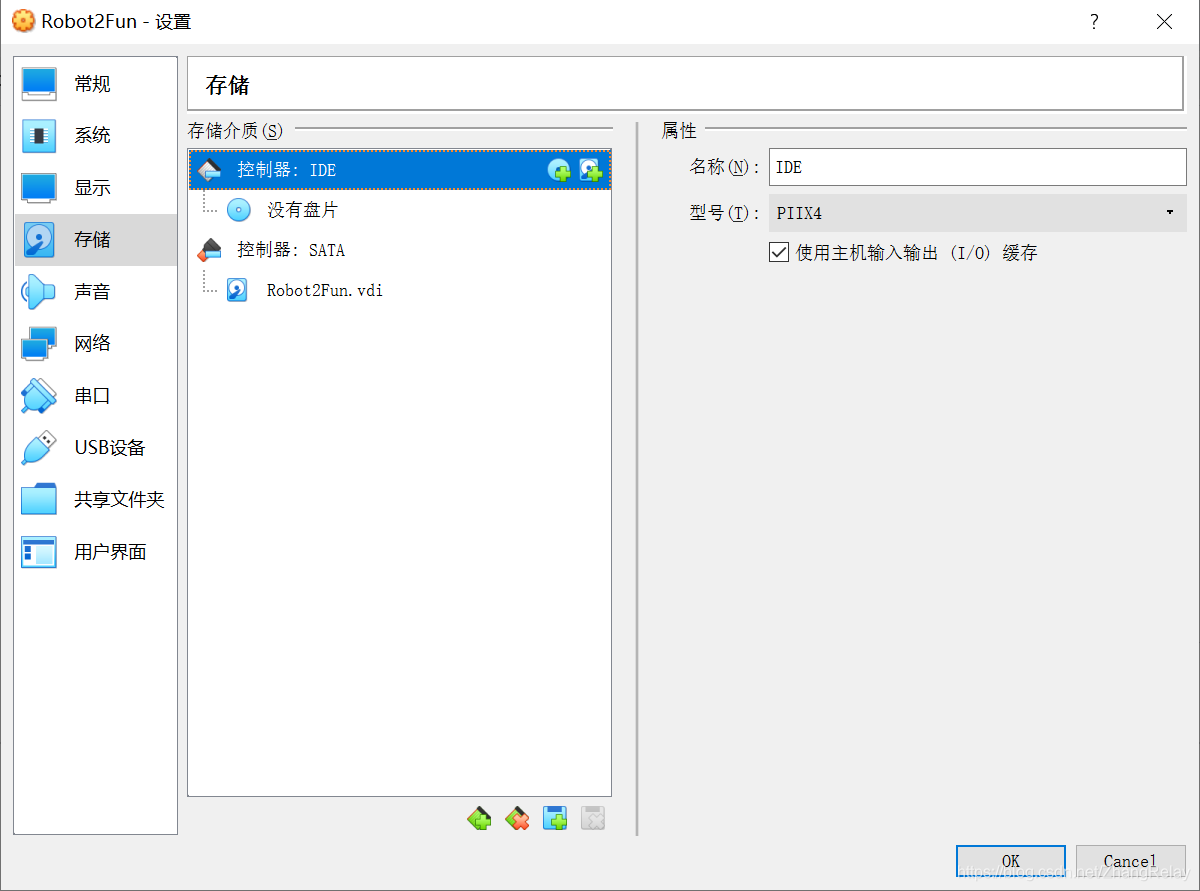
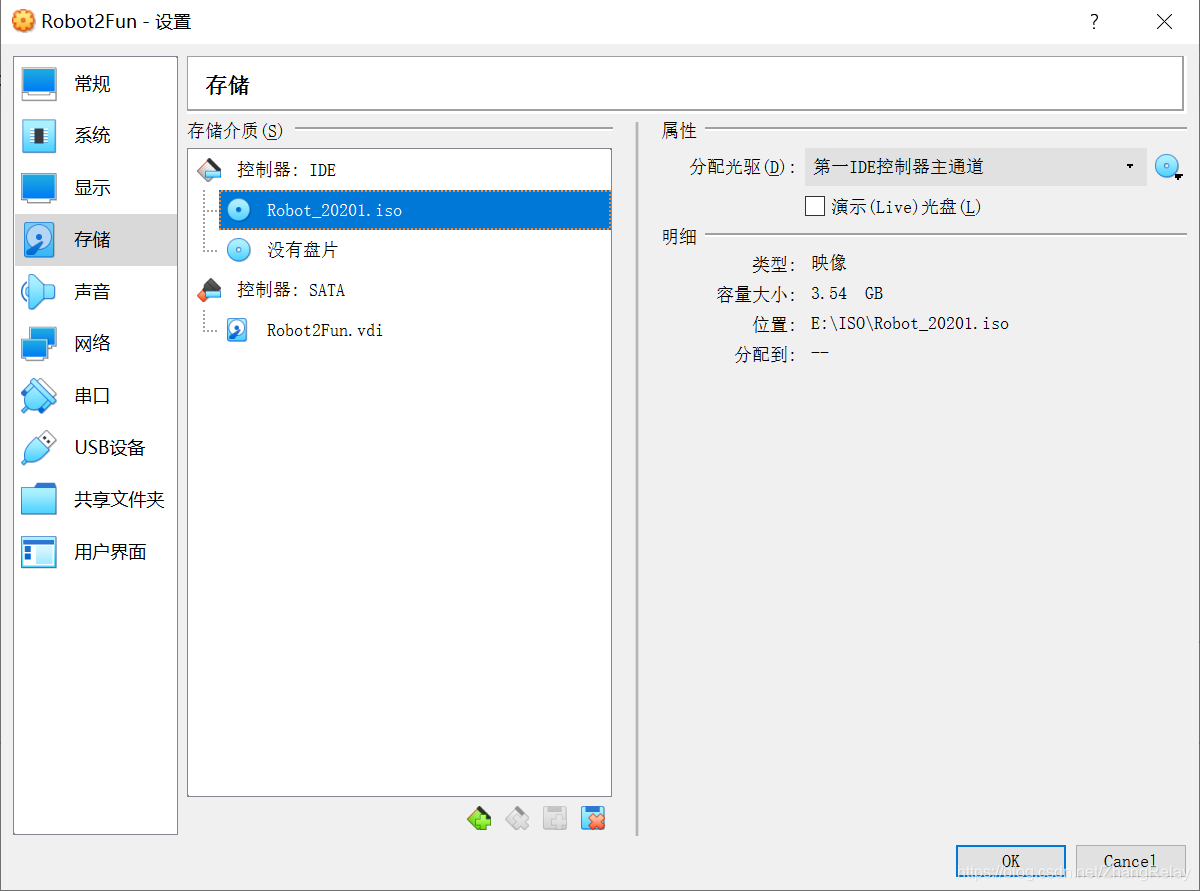
如上为IDE方案!
启动后,出现如下界面:

等待启动完成。

如下为SATA方案:
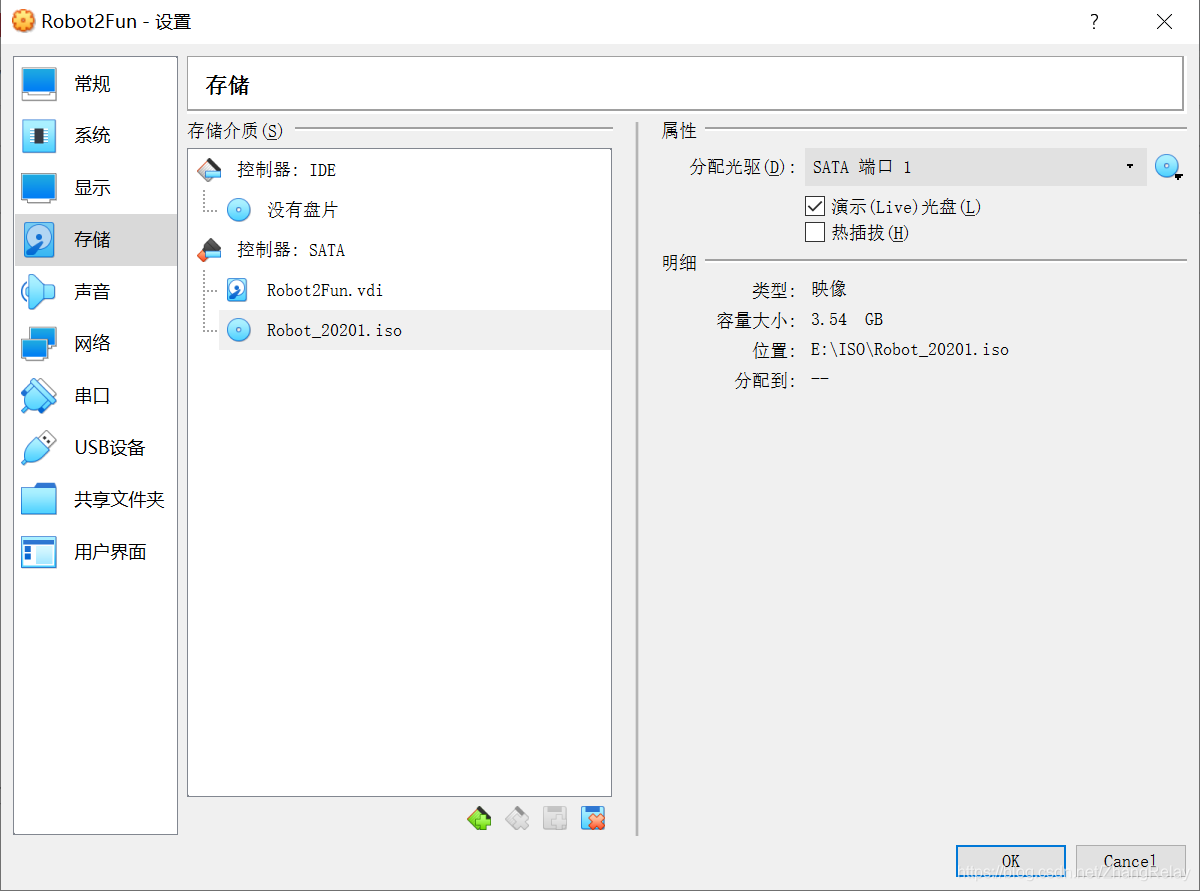

需要设置镜像为第一顺序!

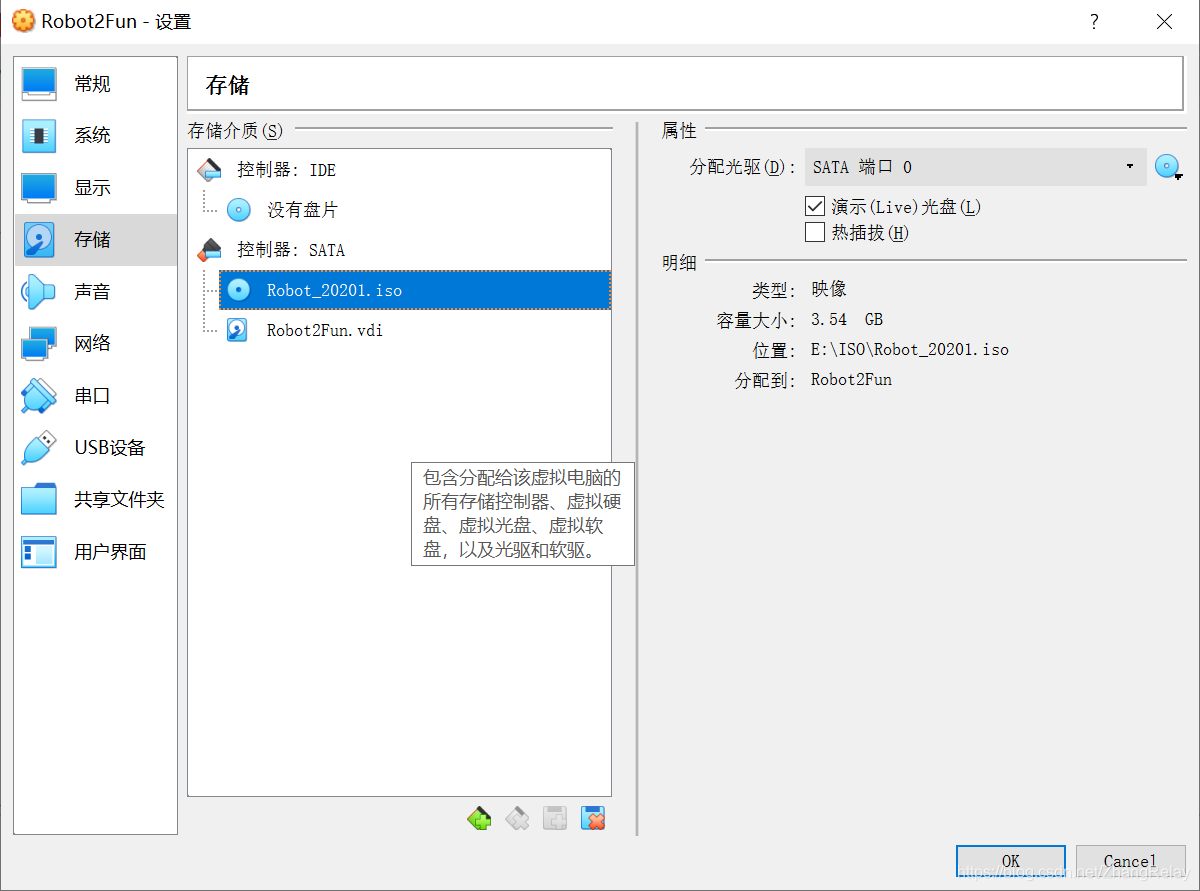
启动,依然失败!目前只用IDE模式。
4 使用内置功能
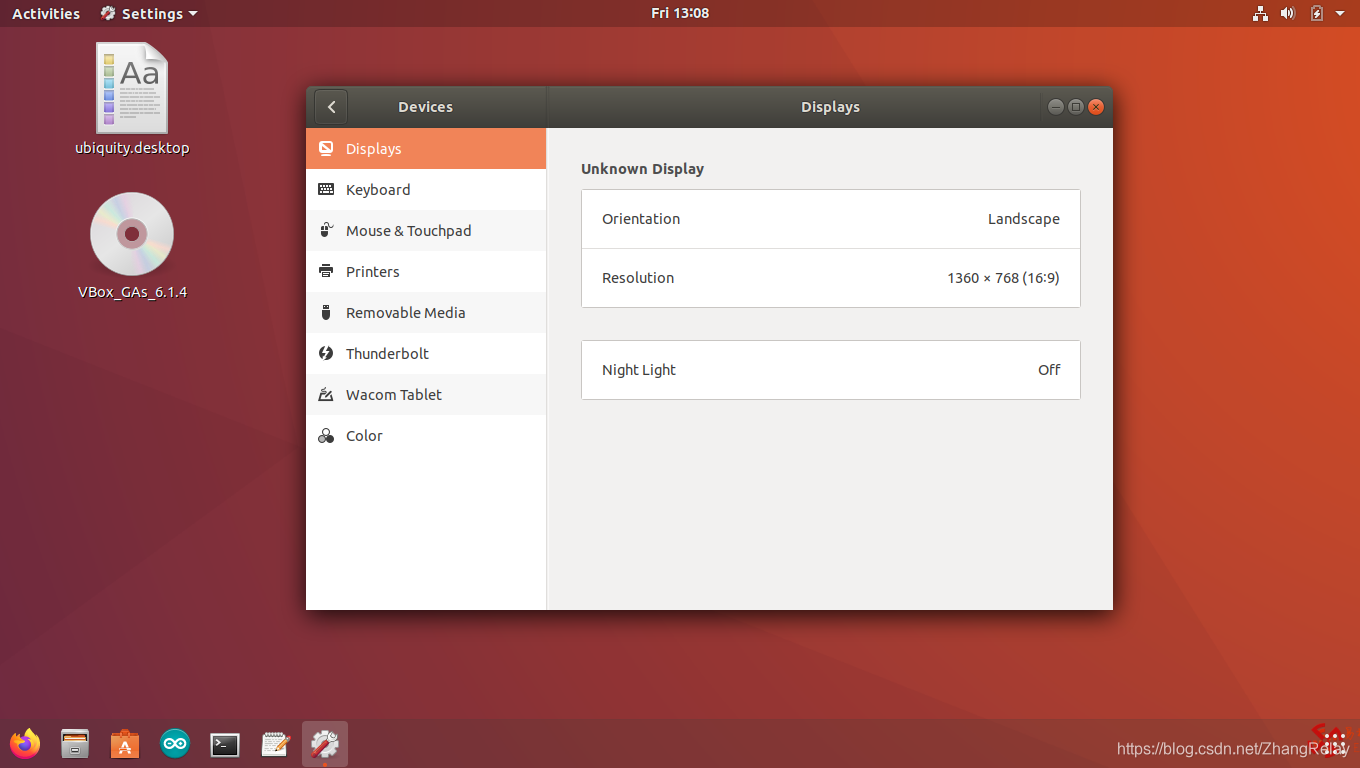
如需更好的硬件性能,请安装增强功能。在设备选项卡最后一项。
配置分辨率:
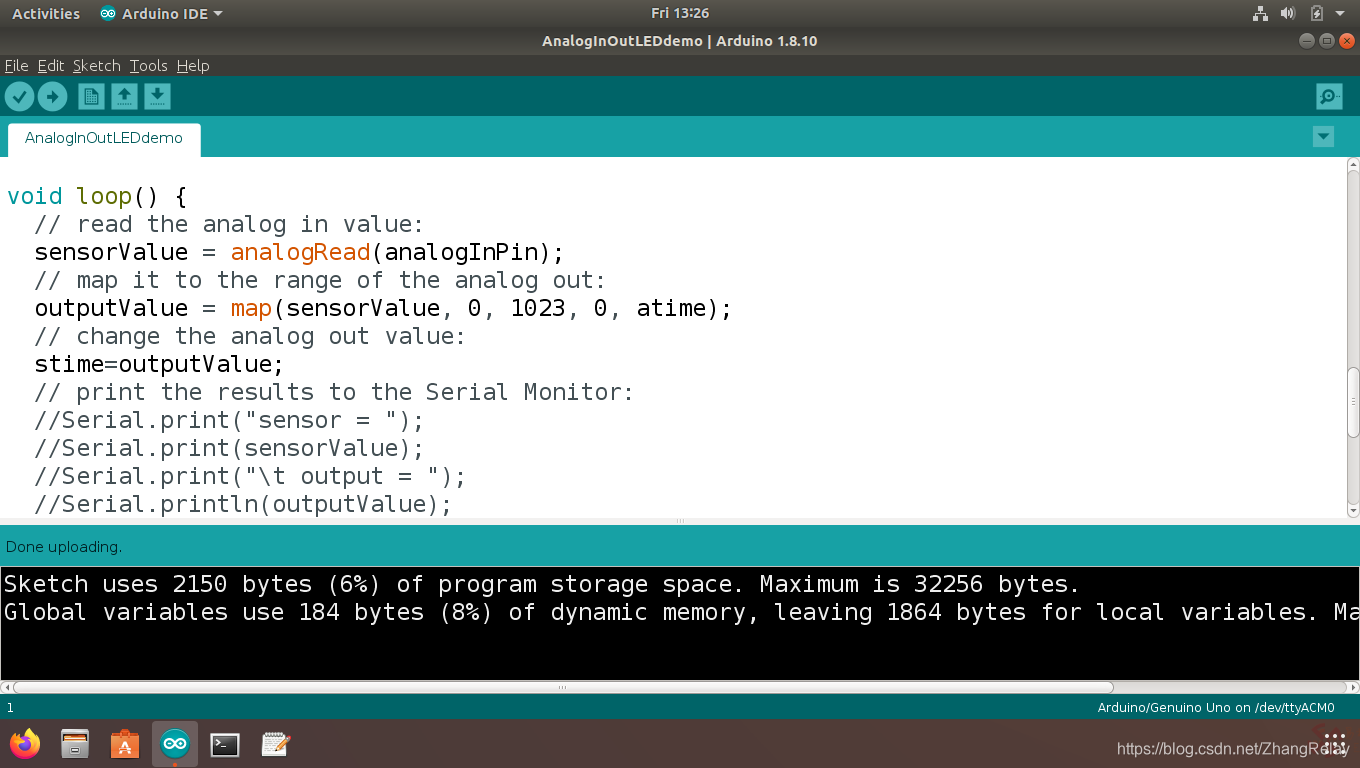
5 Arduino
测试一下是否可以给Arduino硬件编程???

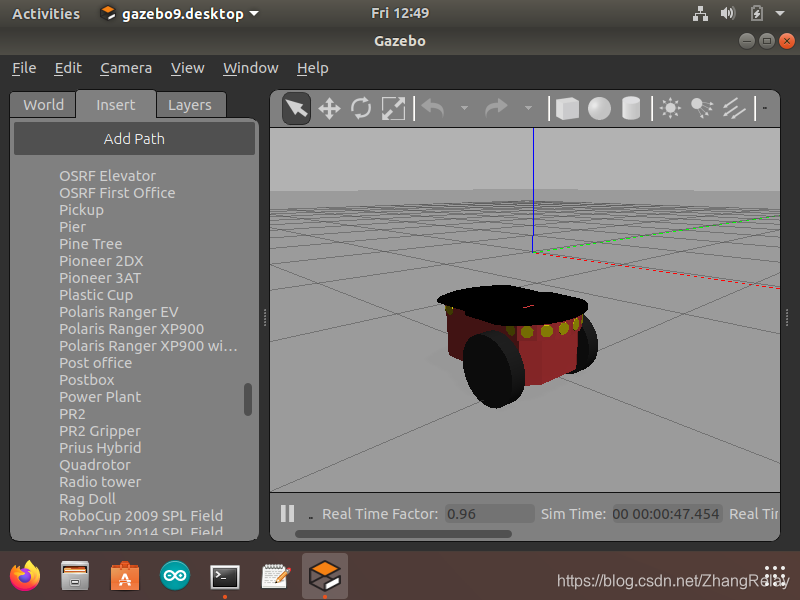
6 ROS
测试roslaunch:
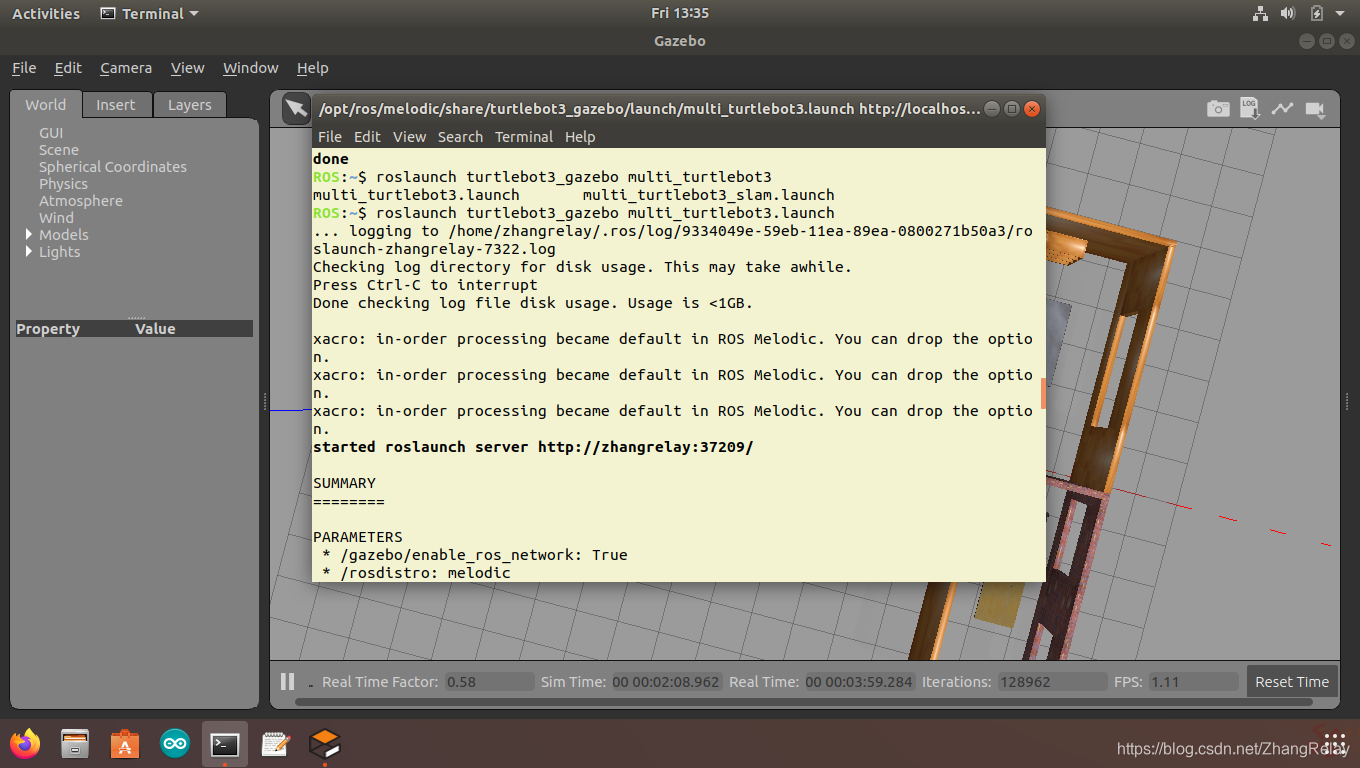

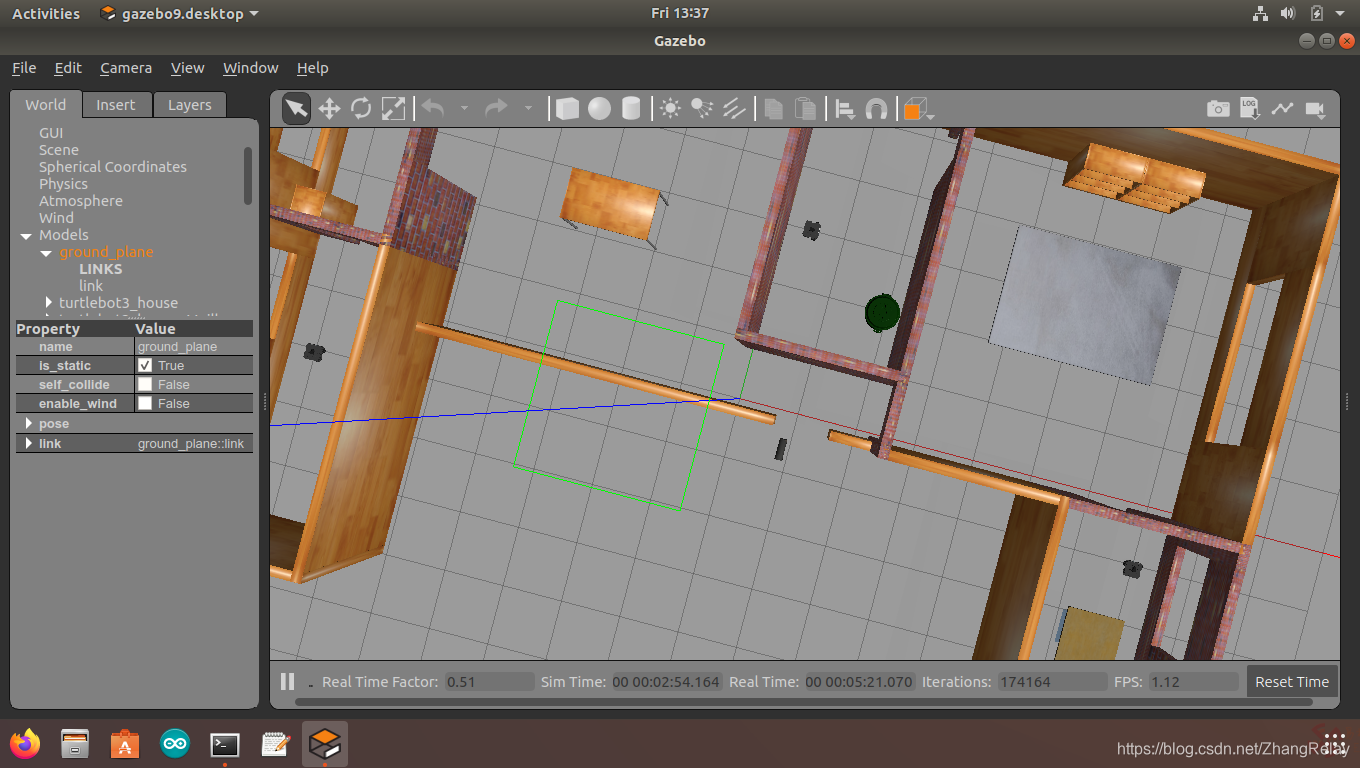
对配置要求高的一些应用运行较慢。但功能全部正常。
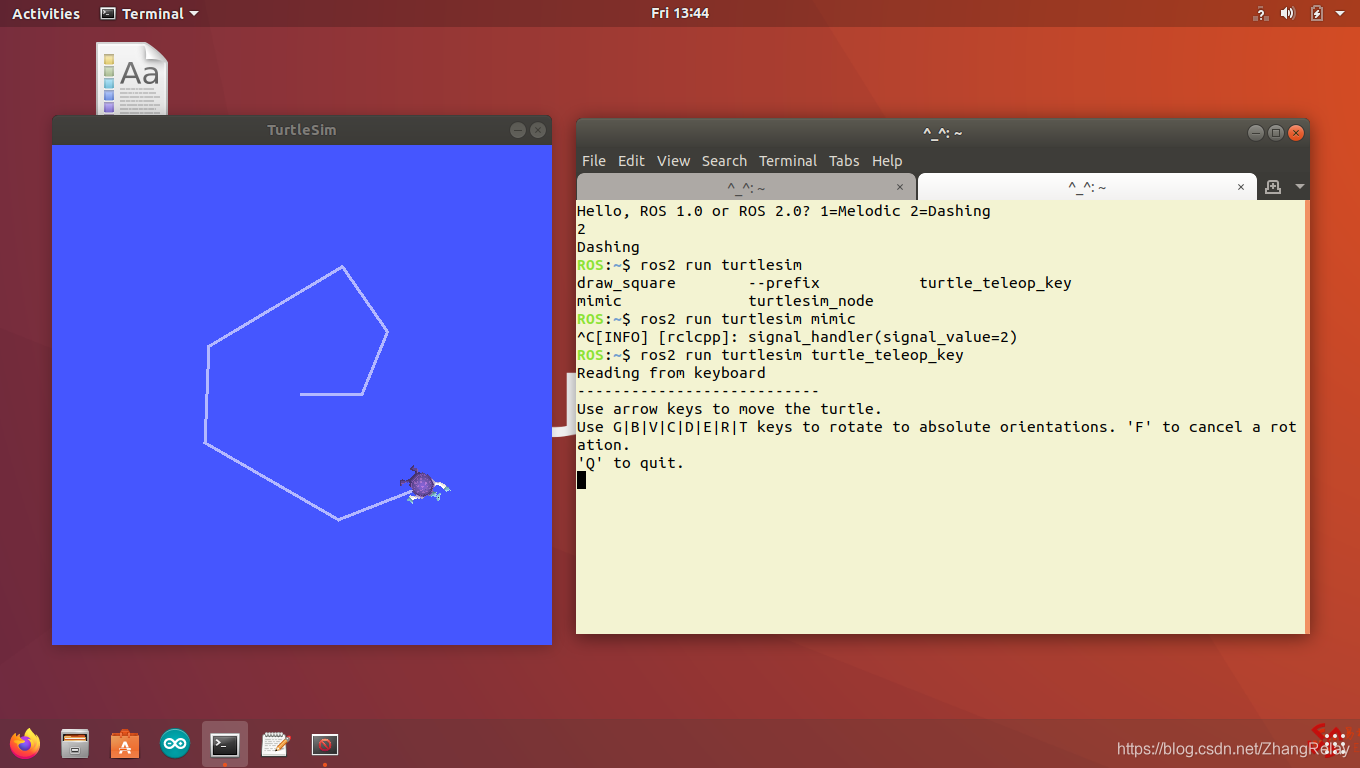
7 ROS 2
简单一些的turtlesim:
8 SLAM

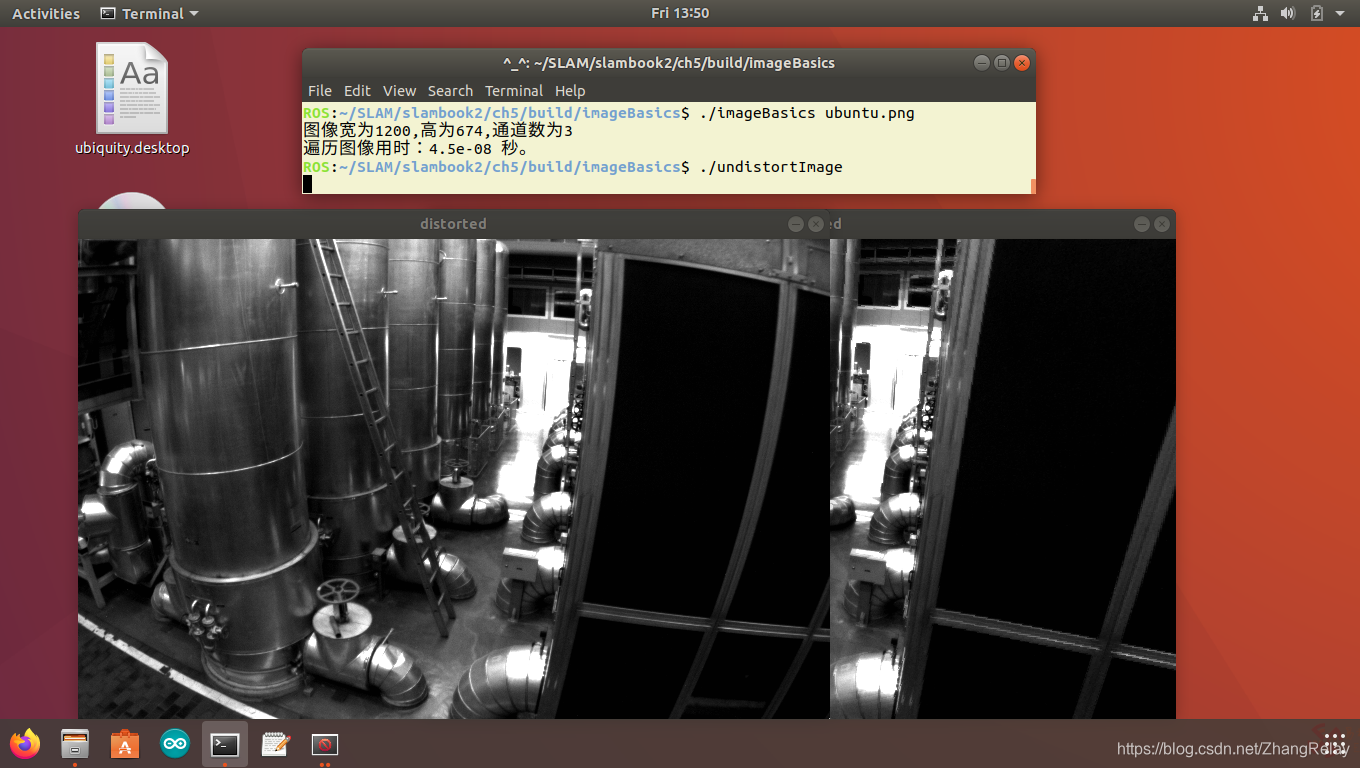
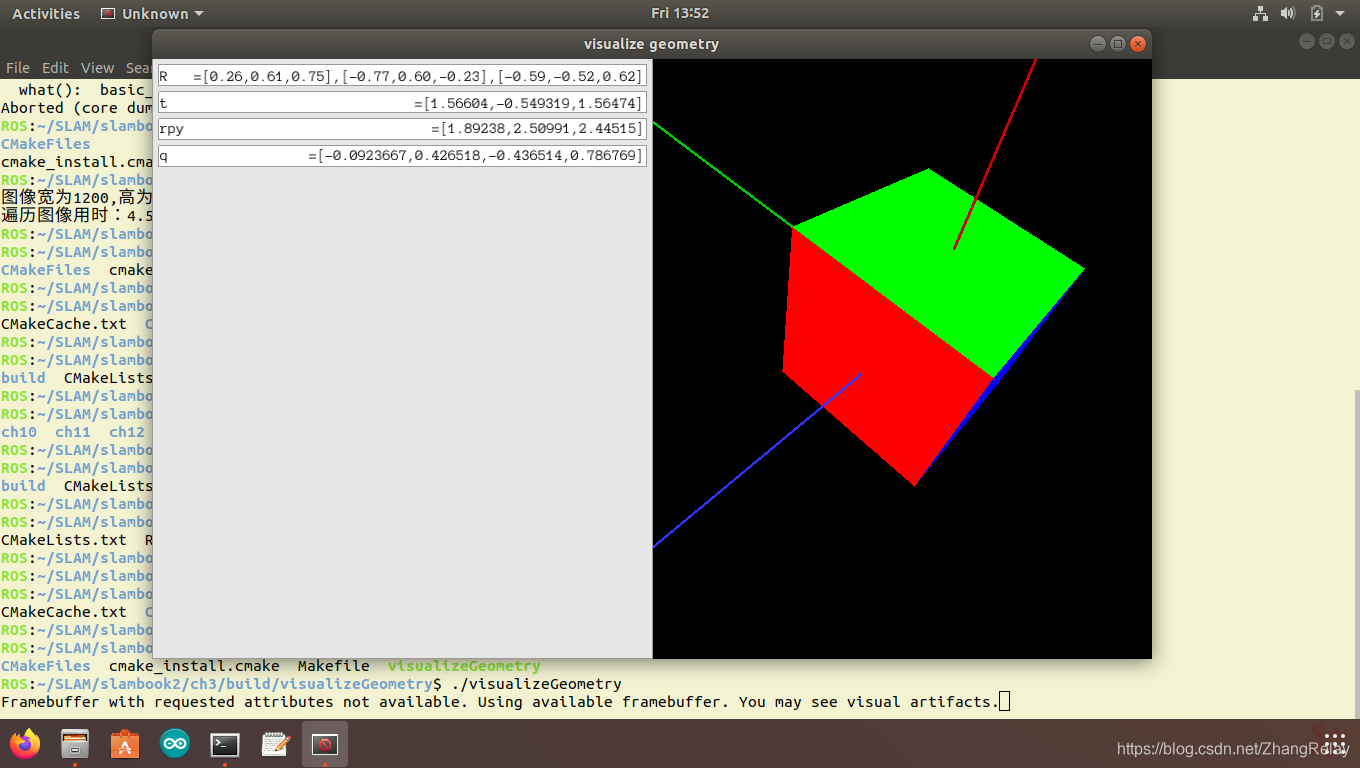
所测试案例全部正常运行。祝福各位使用愉快,收获满满。

华为开发者空间,是为全球开发者打造的专属开发空间,汇聚了华为优质开发资源及工具,致力于让每一位开发者拥有一台云主机,基于华为根生态开发、创新。
更多推荐



 6
6 0
0- 0



 已为社区贡献22条内容
已为社区贡献22条内容

所有评论(0)