ROS Learning-022 learning_tf-06(编程) 现在与过去中穿梭 (Python版) --- waitForTransformFull() 函数
ROS Indigo learning_tf-06 现在与过去中穿梭 (Python版)— waitForTransformFull() 函数我使用的虚拟机软件:VMware Workstation 11使用的Ubuntu系统:Ubuntu 14.04.4 LTSROS 版本:ROS Indigo 一 . 前言这一节要做的事情:使用 tf 的一个强大功能:可以再现在与过去中穿梭。(就是:
ROS Indigo learning_tf-06 现在与过去中穿梭 (Python版) — waitForTransformFull() 函数
我使用的虚拟机软件:VMware Workstation 11
使用的Ubuntu系统:Ubuntu 14.04.4 LTS
ROS 版本:ROS Indigo
一 . 前言
这一节要做的事情:使用 tf 的一个强大功能:可以再现在与过去中穿梭。(就是:如何使用 waitForTransformFull() 函数。)
我们不让 turtle2 跟随当前的 turtle1 的坐标, 而是让 turtle2 去跟随 过去的 turtle1 的坐标。
一样,我们只需要改变 监听器 程序 ( turtle_tf_listener.py )中的一点点代码就可以实现。我们就让 turtle2 去跟随5秒钟前的 turtle1 的坐标吧。
跟随过去 的 程序编写
1 . 重点讲解
我们将之前编写的 监听器 程序 ( turtle_tf_listener.py )里面的这一段代码:
try:
(trans, rot) = listener.lookupTransform('/turtle2', '/turtle1', rospy.Time(0))修改为:
try:
now = rospy.Time.now()
past = now - rospy.Duration(5.0)
listener.waitForTransformFull('/turtle2', now, '/turtle1', now, '/world', rospy.Duration(4.0))
(trans,rot) = listener.lookupTransform('/turtle2', now, '/turtle1', past, '/world')我们来具体了解一下上面代码中出现的:lookupTransformFull() 函数,这个函数也是坐标系信息转换的功能。这个函数有6个形参: ( 其实它的功能和lookupTransform()函数的功能一样,只不过是个升级版函数 ) :
1 . 父类坐标系节点名
2 . 指定时间
3 . 子类坐标系节点名
4 . 指定时间
5 . 指定不随时间改变的坐标系, 在这里是 “/world” 坐标系.
通过 形参1 和 形参2 就可以得到一个 姿态的信息(线速度和角速度),通过 形参3 和 形参4 就可以得到另一个姿态的信息。
图示 lookupTransformFull() 函数的作用:
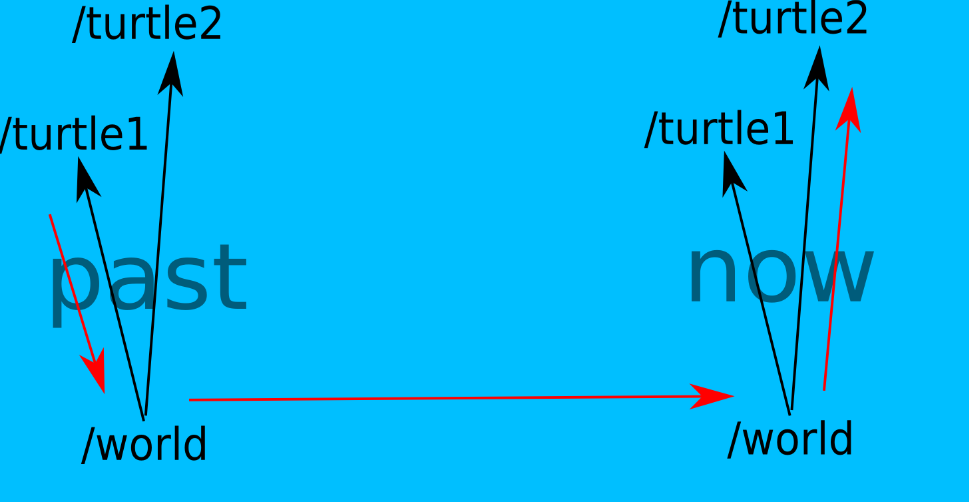
解说一下这幅图的意思: lookupTransformFull() 函数 做了下面三步的事情。
第1步 : 将 形参1 在指定的时间 形参2 时的姿态信息转换到 形参5 坐标系上;
第2步 : 接着,将 形参3 在指定的时间 形参4 时的姿态信息转换到 形参5 坐标系上;
第3步 : 最后,将 第1步 得到的姿态信息做为坐标原点(即:以 形参1 的位置做为参考坐标系),求出 第二步 得到的姿态信息 在 这个参考坐标中的姿态信息,将其做为 lookupTransformFull() 函数返回值输出。
2 . 编写代码
在learning_tf 程序包中的 nodes 路径下,新建一个文件:turtle_tf_listener_pastNow.py:
roscd learning_tf/node/
gedit turtle_tf_listener_pastNow.py下面是完整的程序。将这段程序复制到 turtle_tf_listener_pastNow.py 文件里面:
#!/usr/bin/env python
import roslib
roslib.load_manifest('learning_tf')
import rospy
import math
import tf
import geometry_msgs.msg
import turtlesim.srv
if __name__ == '__main__':
rospy.init_node('tf_turtle')
listener = tf.TransformListener()
rospy.wait_for_service('spawn')
spawner = rospy.ServiceProxy('spawn', turtlesim.srv.Spawn)
spawner(4, 2, 0, 'turtle2')
turtle_vel = rospy.Publisher('turtle2/cmd_vel', geometry_msgs.msg.Twist, queue_size=1)
rate = rospy.Rate(10.0)
listener.waitForTransform("/turtle2", "/turtle1", rospy.Time(), rospy.Duration(4.0))
while not rospy.is_shutdown():
try:
now = rospy.Time.now()
past = now - rospy.Duration(5.0)
listener.waitForTransformFull('/turtle2', now, '/turtle1', now, '/world', rospy.Duration(4.0))
(trans,rot) = listener.lookupTransform('/turtle2', now, '/turtle1', past, '/world')
except (tf.LookupException, tf.ConnectivityException, tf.ExtrapolationException):
continue
angular = 4 * math.atan2(trans[1], trans[0])
linear = 0.5 * math.sqrt(trans[0] ** 2 + trans[1] ** 2)
cmd = geometry_msgs.msg.Twist()
cmd.linear.x = linear
cmd.angular.z = angular
turtle_vel.publish(cmd)
rate.sleep()
给这个文件添加可执行权限:
chmod 777 turtle_tf_listener_pastNow.py3 . 编写启动文件
在learning_tf 程序包中的 launch 路径下,新建一个文件:start_demo6.launch:
roscd learning_tf/launch/
gedit start_demo6.launch将下面的代码拷贝进去。(下面这段代码就是通过 start_demo2.launch 文件改写的,基本和它一模一样)
<launch>
<!-- Turtlesim Node -->
<node pkg="turtlesim" type="turtlesim_node" name="sim" />
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen" />
<node name="turtle1_tf_broadcaster" pkg="learning_tf" type="turtle_tf_broadcaster.py" respawn="false" output="screen" >
<param name="turtle" type="string" value="turtle1" />
</node>
<node name="turtle2_tf_broadcaster" pkg="learning_tf" type="turtle_tf_broadcaster.py" respawn="false" output="screen" >
<param name="turtle" type="string" value="turtle2" />
</node>
<node pkg="learning_tf" type="turtle_tf_listener_pastNow.py" name="listener" />
</launch>4 . 运行
运行 start_demo6.launch 这个启动脚本文件:
$ roslaunch learning_tf start_demo6.launch 这次的运行效果,很不错,当前时间的 turtle2 小海龟 就在跟随这个 过去5秒钟之前的 turtle1 小海龟做运动。
搞定
5 . 扩展: ROS 官方上的错误
下面这段是 ROS 官网中的程序:(这个网站)
try:
now = rospy.Time.now()
past = now - rospy.Duration(5.0)
listener.waitForTransformFull('/turtle2', now, '/turtle1', past, '/world', rospy.Duration(4.0))
(trans,rot) = listener.lookupTransform('/turtle2', now, '/turtle1', past, '/world')这段代码是错误的。如果运行的话,会输出下面的错误信息:
[listener-6] process has died [pid 8919, exit code 1, cmd /home/aobosir/catkin_ws/src/learning_tf/nodes/turtle_tf_listener_pastNow.py __name:=listener __log:=/home/aobosir/.ros/log/71c1eedc-75ad-11e6-8577-000c29fd0c33/listener-6.log].
log file: /home/aobosir/.ros/log/71c1eedc-75ad-11e6-8577-000c29fd0c33/listener-6*.log
正确的代码就是:(这样就不会出现问题)
try:
now = rospy.Time.now()
past = now - rospy.Duration(5.0)
listener.waitForTransformFull('/turtle2', now, '/turtle1', now, '/world', rospy.Duration(4.0))
(trans,rot) = listener.lookupTransform('/turtle2', now, '/turtle1', past, '/world')总结:
现在,我们学会了如果在ROS 中进行不同时间段之间的 tf 转换。
接下来,下一节,介绍:如果调试使用 tf 转换的程序(C++ 版)。

华为开发者空间,是为全球开发者打造的专属开发空间,汇聚了华为优质开发资源及工具,致力于让每一位开发者拥有一台云主机,基于华为根生态开发、创新。
更多推荐



 0
0 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)