2017 FIRA SIMUROSOT仿真环境(ROS+Gazebo)
2017 FIRA SIMUROSOT仿真环境(ROS+Gazebo)----SIMUROSOT-AIR=============这是2017年FIRA SIMUROSOT空中机器人环境=============操作系统:ubuntu 14.04ROS:IndigoGazebo:2.2.3不要在(任何)虚拟机上安装操作系统,否则会出现很多Bug问题。1.安装ROS&Gazebo:您可以访问:htt
2017 FIRA SIMUROSOT仿真环境(ROS+Gazebo)
----
SIMUROSOT-AIR
=============
这是2017年FIRA SIMUROSOT空中机器人环境
=============
操作系统:ubuntu 14.04
ROS:Indigo
Gazebo:2.2.3
![]() 不要在(任何)虚拟机上安装操作系统,否则会出现很多Bug问题。
不要在(任何)虚拟机上安装操作系统,否则会出现很多Bug问题。
![]()
1.安装ROS&Gazebo:
您可以访问:http : //wiki.ros.org/indigo/Installation/Ubuntu 进行下载并学习ROS Indigo版本。
这里我们复制下面的一些步骤:
- 设置你的sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' - 设置你的钥匙
sudo apt-key adv --OS: indigokeyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116 - 安装
sudo apt-get update sudo apt-get install ros-indigo-desktop-full - 初始化rosdep
sudo rosdep init rosdep update - 环境设置
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc source ~/.bashrc - 获取rosinstall
sudo apt-get install python-rosinstall
注意:
 有些用户在启动Gazebo时找不到模型的命名空间,原因可能是网络问题。解决方案是手动下载.gazebo文件并将其复制到主目录,我们提供.gazebo文件。
有些用户在启动Gazebo时找不到模型的命名空间,原因可能是网络问题。解决方案是手动下载.gazebo文件并将其复制到主目录,我们提供.gazebo文件。
2.安装模拟器:
为模拟器创建工作区
mkdir -p ~/catkin_ws/src cd ~/catkin_ws catkin_make source devel/setup.bash下载项目
将ardrone_simulator文件复制到〜/ catkin_ws / src /目录。
下载依赖关系
cd ~/catkin_ws/src git clone https://github.com/AutonomyLab/ardrone_autonomy.git # The AR.Drone ROS driver cd .. rosdep install --from-paths src --ignore-src --rosdistro indigo -y sudo apt-get install libjsoncpp-dev libjsoncpp0 # Library for reading and writing JSON编译模拟器
catkin_make来源于环境
source devel/setup.bash复制model.json文件
将model.json文件复制到主目录。
model.json文件用于动态配置模拟环境的道路,QR码,障碍物,塔楼和住宅楼的位置和数量。
3.运行模拟:
在cvg_sim_gazebo包中执行启动文件运行仿真:
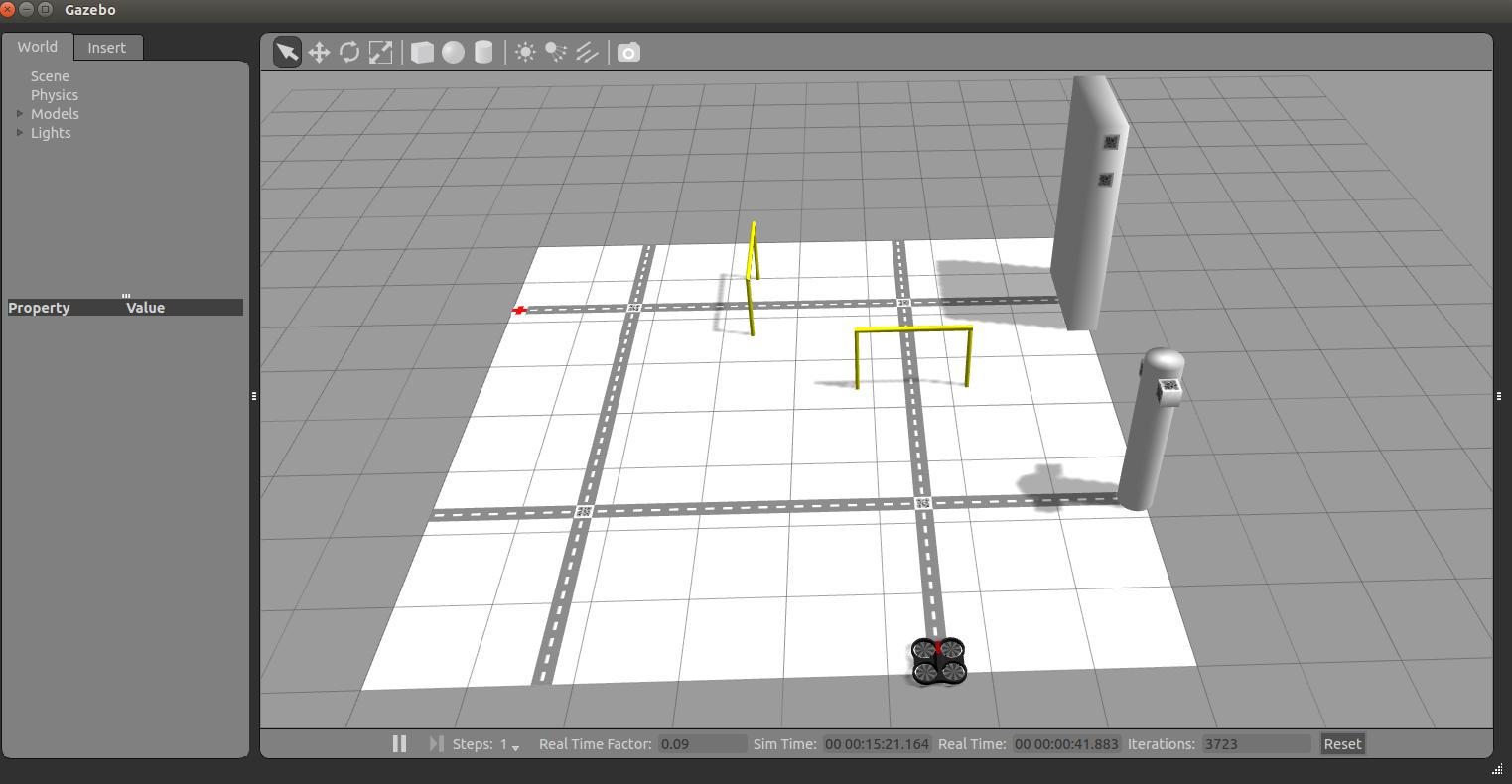
roslaunch cvg_sim_gazebo ardrone_testworld.launch
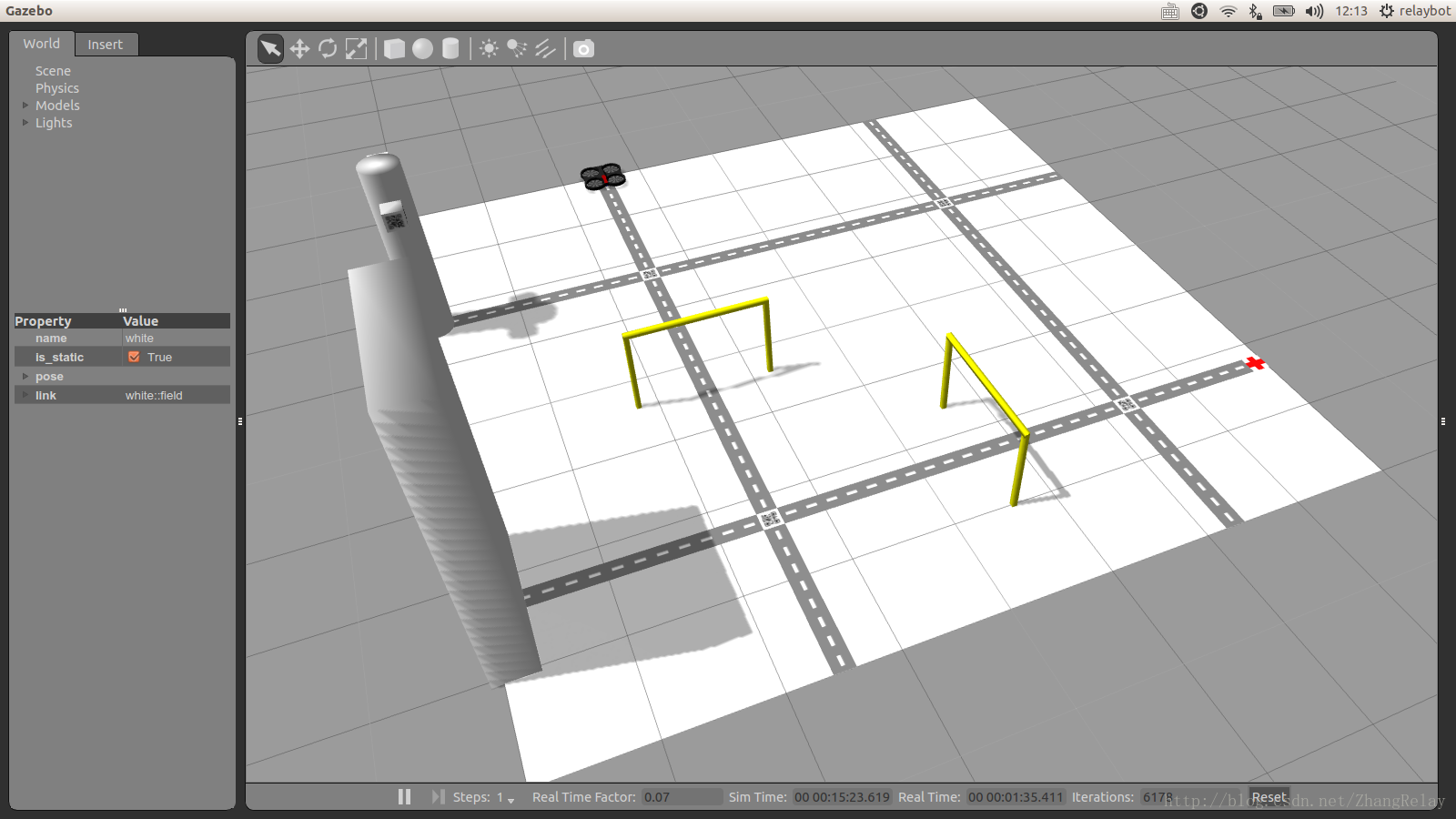
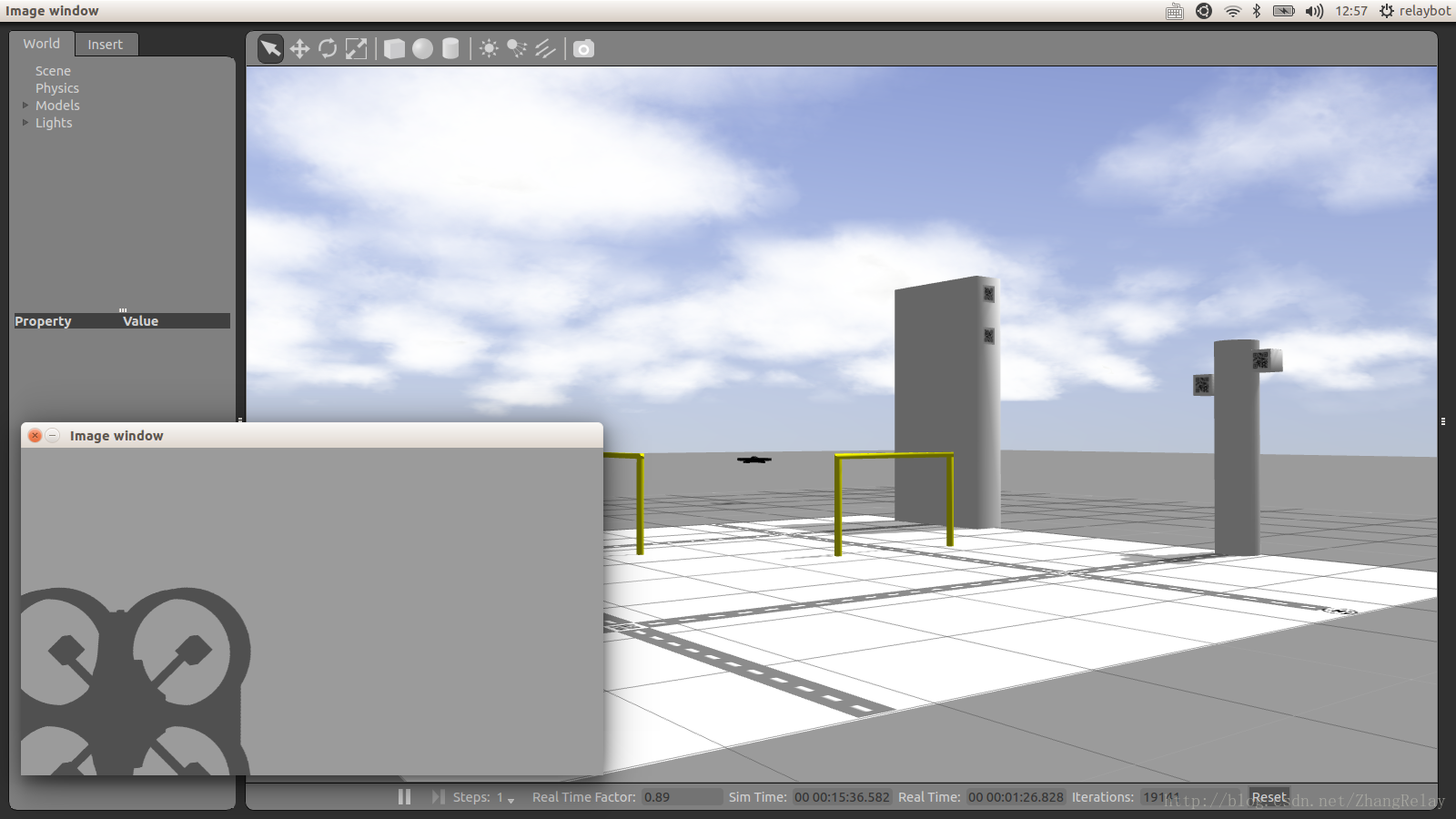
如果你看到如下截图,配置成功!
4.在Indigo上运行ardrone fira air演示
下载并制作项目
将ardrone_fira文件复制到〜/ catkin_ws / src /目录。
cd ~/catkin_ws/ catkin_make source devel/setup.bash运行演示
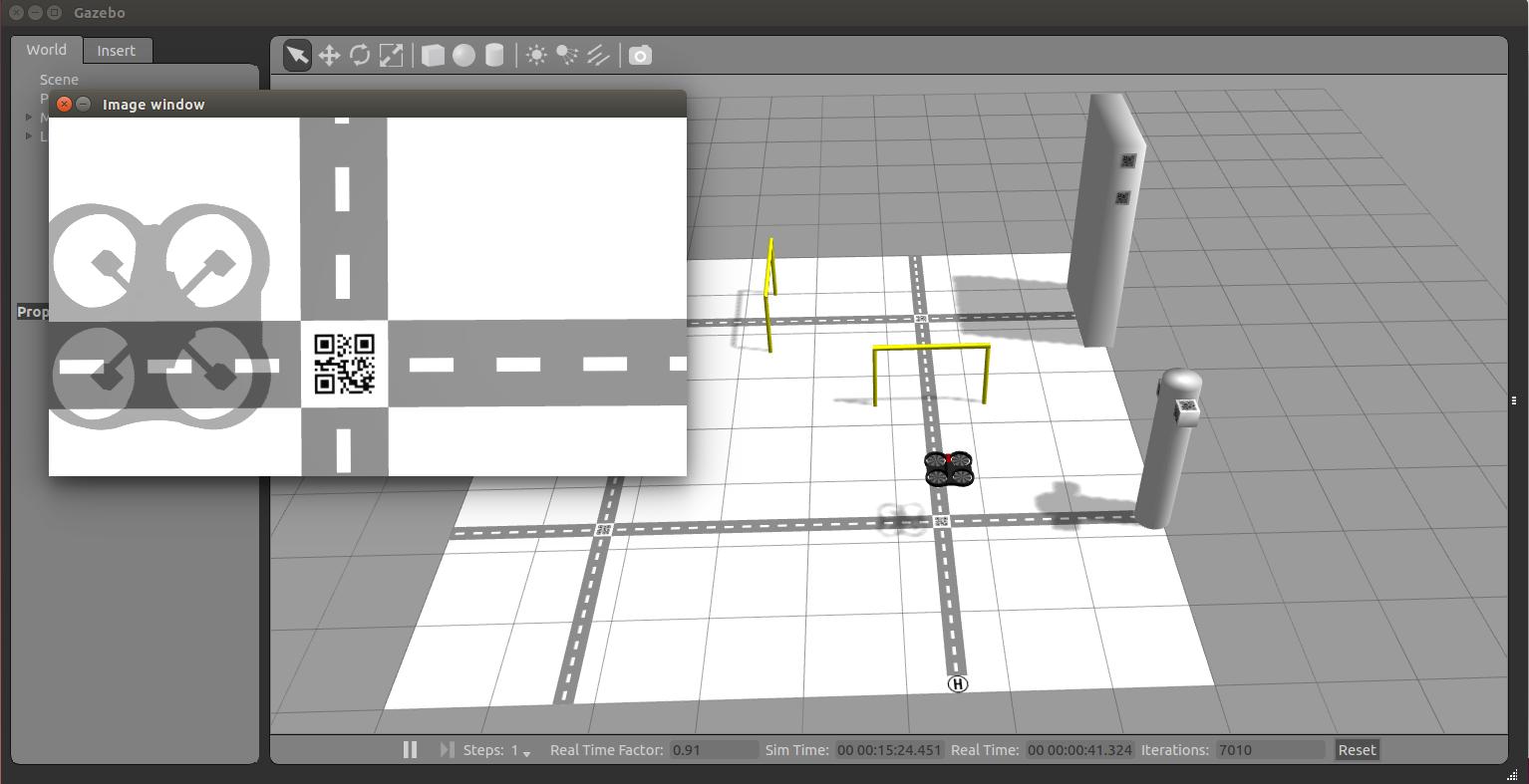
roslaunch ardrone_fira ardrone_fira.launch
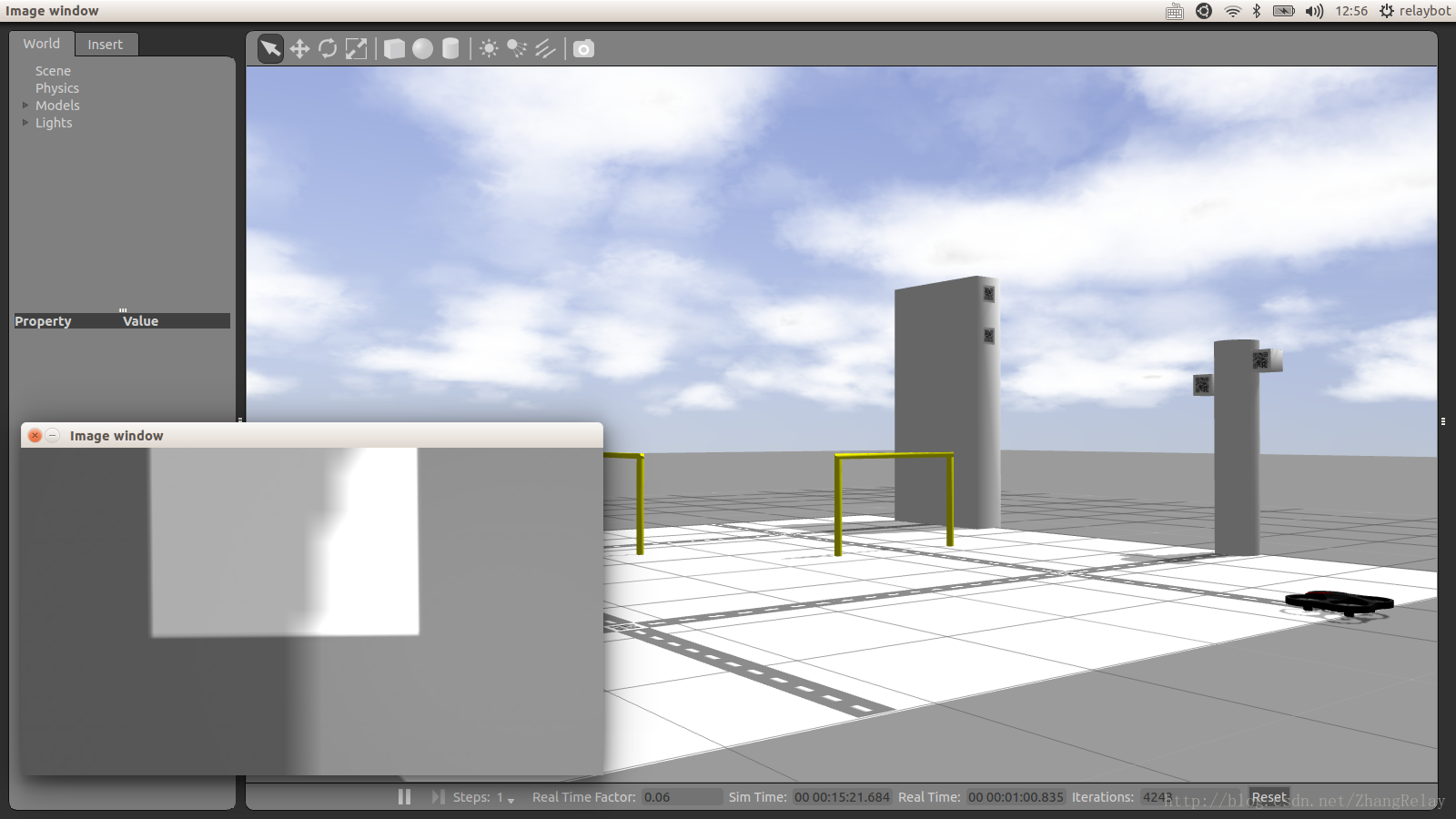
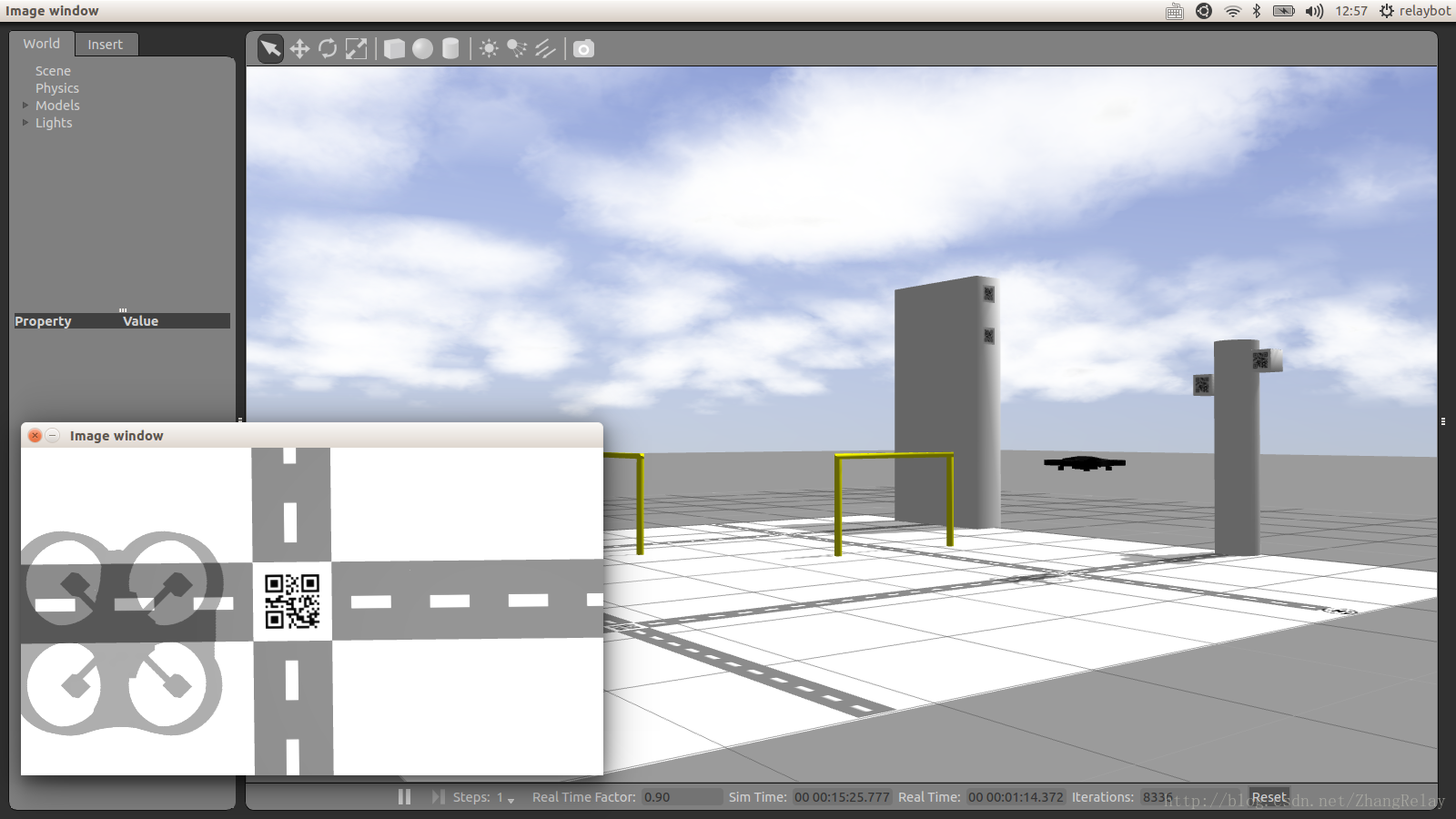
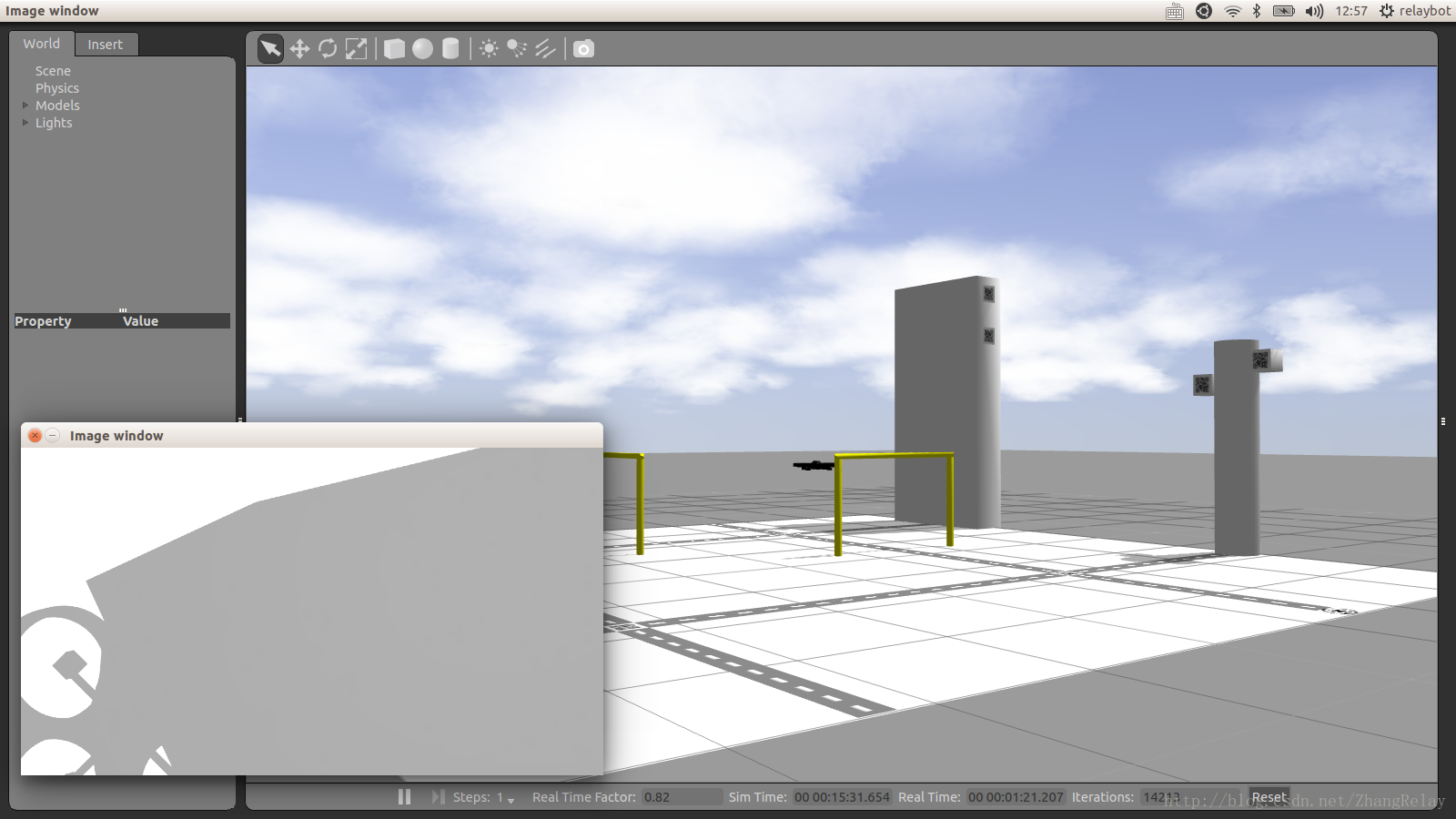
如果你看到如下截图,演示成功!
----
SIMUROSOT ROBO CHANLLENGE
=============
这是2017年FIRA SIMUROSOT ROBO CHANLLENGE环境
=============
操作系统:ubuntu 16.04
ROS:Kinectic
您不得在(任何)虚拟机上安装操作系统,否则会出现很多问题。
1.安装ROS:
您可以访问:http : //wiki.ros.org/kinetic/Installation/Ubuntu 了解如何下载和使用ROS Kinetic版本。
这里我们复制下面的一些步骤:
设置你的sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'设置你的钥匙
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116安装
sudo apt-get update sudo apt-get install ros-kinetic-desktop-full初始化rosdep
sudo rosdep init rosdep update环境设置
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc source ~/.bashrc
Turtlebot&Gazebo包
```
sudo apt-get install ros-kinetic-turtlebot-gazebo
```
3. SIMUROSOT-ROBOCHALLENGE
3.1下载此项目
3.2添加模式
在您的主目录中,按Ctrl + H显示隐藏目录,然后转到Gazebo/models子目录。将colorbox,models/newbox和models/newfield复制到此目录。
3.3运行程序
```
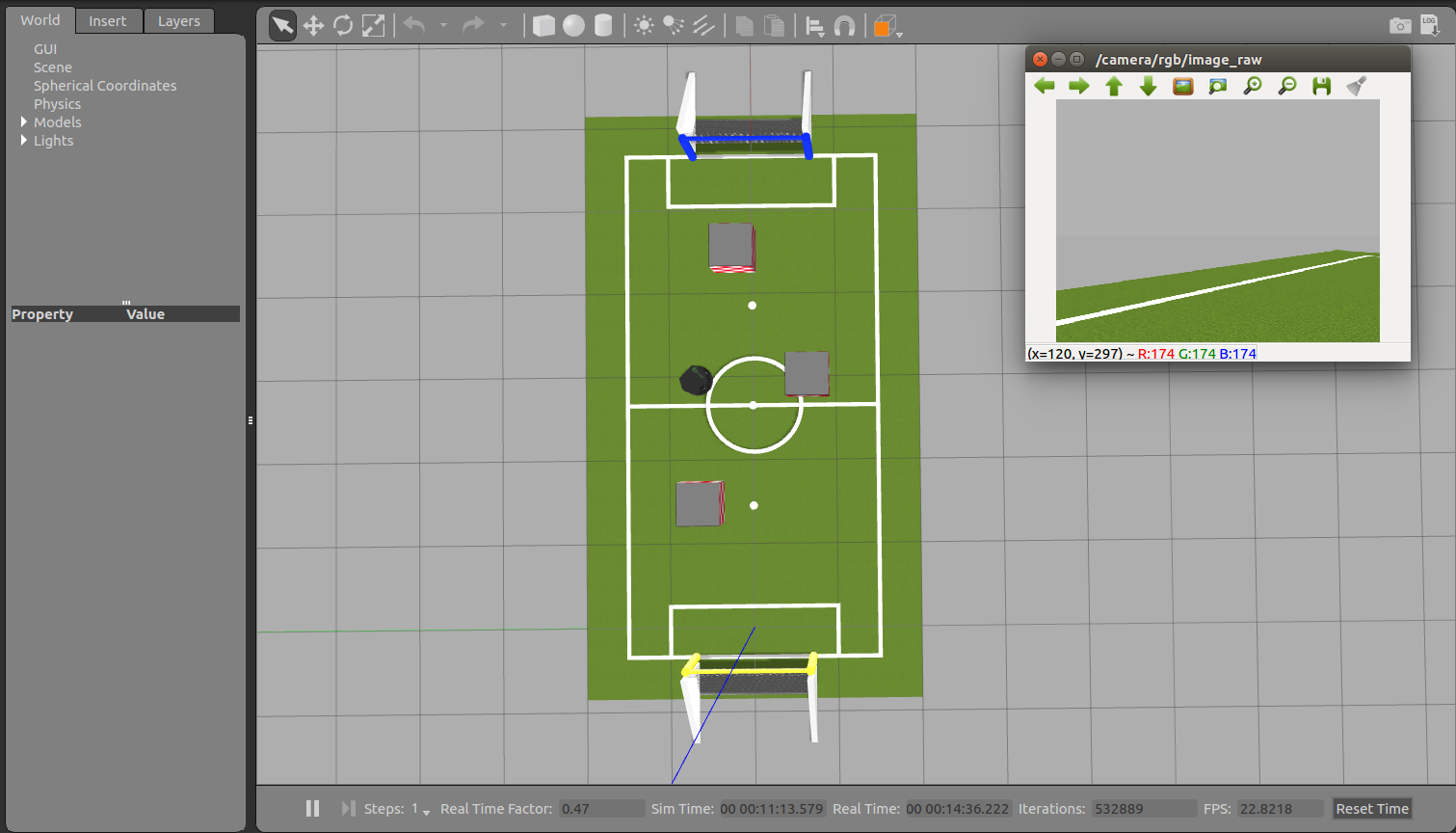
python ./start.py 1 1
```
如果你看到如下截图,启动成功。
文件说明
4.1文件结构
./ros_scripts
├──how_to_run.py
├──robot.py
├──start.py
└──world.world
4.2详细说明文件
start.py
这是启动脚本。当它运行时,它将启动所有必要的程序。开始之后,Turtlebot将根据how_to_run.py脚本中定义的内容进行操作。
2. how_to_run.py
这个脚本定义了乌龟的行为。该脚本中只有一个功能“Run”,该函数有一个“机器人”参数,它是“机器人”类的对象。在这个对象中,一些动作被定义为操纵Turtlebot。“start.py”脚本将通过启动脚本调用,并传送“机器人”对象。
robot.py
该脚本定义了一个“机器人”类,它包含了一些操作turtlebot的基本功能。
set_move_speed(met_per_sec):设置turtlebot的速度,单位为m / s。
set_turn_speed(deg_per_sec):设置turbotbot的旋转速度,单位为度/秒。
go_forward(秒):让turtlebot以给定的速度移动“秒”秒。
turn_around(秒):让turtlebot以给定的转速旋转“秒”秒。
get_image():从相机获取当前图像。该图像将RGB信息包含为2D矩阵。
世界世界
该文件定义了包括游戏场和障碍物在内的环境。它将被“start.py”脚本调用。我们已经在“世界”子目录中定义了更多的测试环境。您可以使用它们进行测试。
4.3更多的事情
给定的演示对于初学者来说很简单。您可以根据“robot.move_cmd”和“robot.turn_cmd”来定义更复杂的功能。并使用“robot.cmd_vel.publish(robot.move_cmd)”发布你的操纵。如模仿转身而动。
----
参考网址:
1. https://github.com/zerowind168/SIMUROSOT-ROBOCHALLENGE
2. https://github.com/zerowind168/SIMUROSOT-AIR
----

华为开发者空间,是为全球开发者打造的专属开发空间,汇聚了华为优质开发资源及工具,致力于让每一位开发者拥有一台云主机,基于华为根生态开发、创新。
更多推荐



 4
4 0
0- 0



 已为社区贡献22条内容
已为社区贡献22条内容

所有评论(0)