ROS Learning-007 beginner_Tutorials ROS节点
ROS Indigo beginner_Tutorials-06 ROS节点我使用的虚拟机软件:VMware Workstation 11使用的Ubuntu系统:Ubuntu 14.04.4 LTSROS 版本:ROS Indigo一. 理解ROS 节点:ROS的节点: 可以说是一个可运行的程序。当然这个程序可不简单。因为它可以接受来自ROS网络上其他可运行程序的输出信息,也可以发送信息给R
ROS Indigo beginner_Tutorials-06 ROS节点
我使用的虚拟机软件:VMware Workstation 11
使用的Ubuntu系统:Ubuntu 14.04.4 LTS
ROS 版本:ROS Indigo
一. 理解ROS 节点:
ROS的节点: 可以说是一个可运行的程序。当然这个程序可不简单。因为它可以接受来自ROS网络上其他可运行程序的输出信息,也可以发送信息给ROS网络,被其他 ROS 可运行程序 接收。所以虽然你看ROS它是在执行好多个程序,但是它们可是相互关联的,是一个网络。所以 Willow Garage 公司管这种可运行的程序叫做: 节点。
二. 运行ros节点的大前提:
运行ros节点的大前提就是启动roscore (它是运行所有ROS程序前 首先要运行的命令) 。新开一个终端(Ctrl+Alt+T):
roscore命令执行完之后,它也会产生一个节点,这个节点是主节点,叫:/rosout。
三. 查看当前运行的 ROS 节点
现在你可以重新打开一个终端(Ctrl+Alt+T)去运行你要运行的ROS节点程序了:
我们先来看一下,当前有什么节点在运行:重新开一个终端,执行 rosnode list命令 就可以罗列出当前运行的所有ROS节点:

(roscore命令 启动的就是 rosout 节点)
如果我们想看一下 某个节点里面的具体的信息,要怎么做:
$ rosnode info /rosout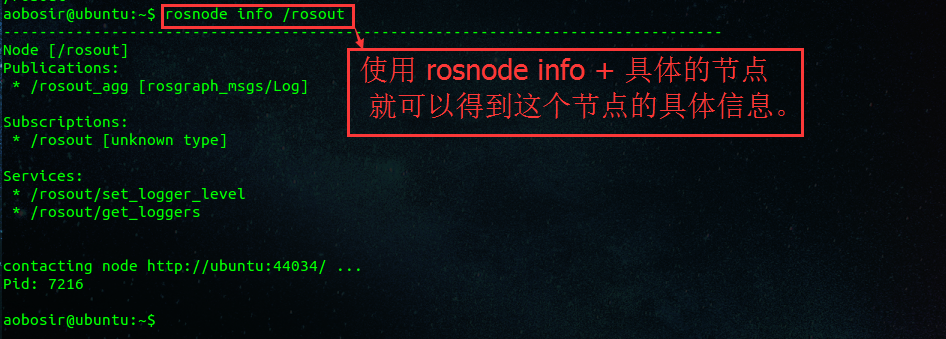
没错,现在你也不知道这些信息有什么用处,你现在不知道没有关系,等用到时,我再介绍。
四. 举个例子,运行一个节点:
下面来具体运行一个 ros节点 程序,使用什么命令运行它 呢? 答案: rosrun 命令。
比如: 运行一个 ROS 里的例子程序: (这个例子是开一个窗口,窗口里面有一只小海龟。我仅仅只是想举一个例子来让大家直观的看看ROS节点是个什么东西。)
$ rosrun turtlesim turtlesim_node输出下面信息,并弹出一个TurtleSim窗口,如下图所示。
[ INFO] [1472484820.593688966]: Starting turtlesim with node name /turtlesim
[ INFO] [1472484820.599420738]: Spawning turtle [turtle1] at x=[5.544445], y=[5.544445], theta=[0.000000]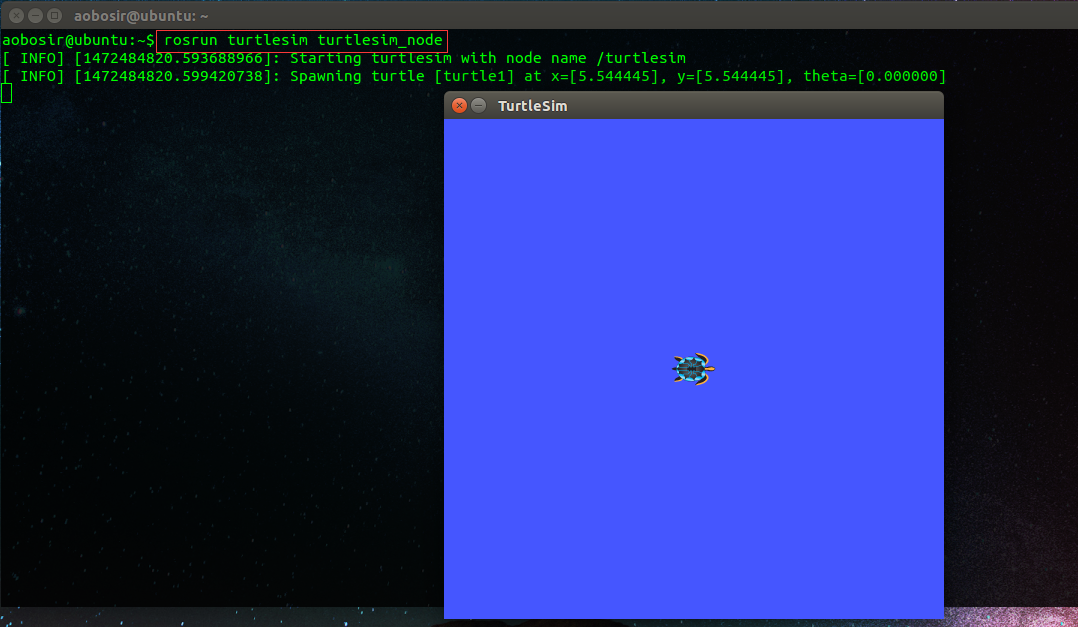
看到了吗,这就是 ros 节点。
现在看一下这个
rosrun命令的使用格式:# rosrun [package_name] [node_name]其中:package_name是程序包名;node_name是ros节点的可执行程序的名字。
我们重新开个终端(Ctrl+Alt+T),执行 rosnode list 命令,再来看现在有哪些节点在运行:
/rosout
/turtlesim
五. 自定义节点的名字:
如果你不喜欢这些默认生成的ROS节点名(/rosout /turtlesim). 你可以使用下面的方法改写它 ros节点的名称: (再新开一个终端)
$ rosrun turtlesim turtlesim_node __name:=my_turtle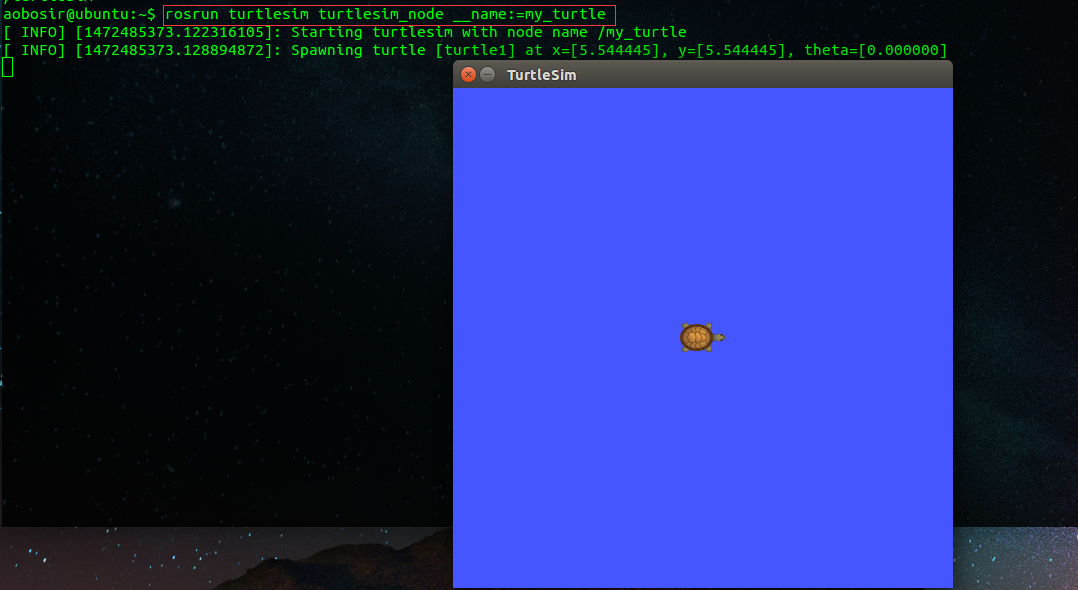
参数 __name 后面跟的就是你自定义的名字。
再来看看当前运作的ros节点有哪些: (再新开一个终端)

六. ping一个ROS节点
你看ROS它是在执行好多个程序,但是它们可是相互关联的,是一个网络。所以我们可以ping任何一个节点。
rosnode ping /my_turtle
小小总结:
我上面说了,ROS中的每个节点都可以将一些数据发布到ROS网络上(这个过程叫做:发布话题)。并且ROS的每个节点都可以在这个网络总线上接收自己想要的数据(这个过程叫订阅话题, 就像是你订阅一刊杂志一样)。
所以下一讲,就讲: ROS 发布话题 和 订阅话题:

华为开发者空间,是为全球开发者打造的专属开发空间,汇聚了华为优质开发资源及工具,致力于让每一位开发者拥有一台云主机,基于华为根生态开发、创新。
更多推荐



 1
1 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)