python计算机视觉学习第9章——图像分割
基于这种标记在RGB值上可以训练除一个朴素贝叶斯分类器,之后计算每一个像素的分类概率,这些计算除的分类概率便是从源点出来到汇点取的边的权重。图割图像分割的思想是用图来表示图像,并对图进行划分以使割代价最小,用图表示图像时,增加两个额外的节点,源点和汇点,并仅考虑那些将源点和汇点分开的割。这里使用的图像是书中用的数据集图像,可以帮助评价分割性能的真实标记,并模拟用户选择矩形图像区域或用‘lasso’
目录
引言
图像分割是将一幅图像分割成有意义区域的过程。区域可以是图像的前景与背景或图像中一些单独的对象。这些区域可以利用一些诸如颜色、边界或近邻相似性等特征进行构建。
一、图割(Graph Cut)
图是由若干个节点和连接节点的边构成的集合。边可以是有向的或是无向的并且这些可能有与它们相关联的权重。
图割是将一个有向图像分割成两个互不相交的集合,可以用来解决很多计算机视觉方面的问题。其基本思想是,相似且彼此相近的像素应该划分到同一区域。
图割C(C是图中所有边的集合)的“代价”函数定义为所有割的边的权重求和相加:
是图中节点i到节点j的边(i,j)的权重,且是对割C所有的边进行求和。
图割图像分割的思想是用图来表示图像,并对图进行划分以使割代价最小,用图表示图像时,增加两个额外的节点,源点和汇点,并仅考虑那些将源点和汇点分开的割。寻找最小的割等同于在源点和汇点之间寻找最大流/最小割的问题。
这里的图割例子中将采用python-graph工具包,需要另外下载,我在pycharm中并未找到这个工具包,因此在https://github.com/pmatiello/python-graph中下载了python-graph-master文件,将其复制到项目文件下即可。
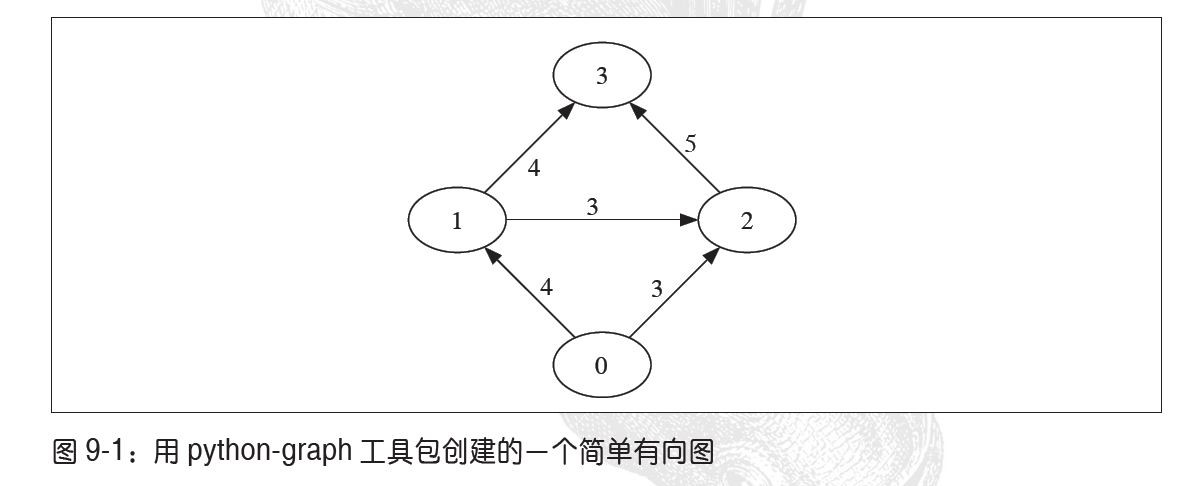
这里是使用工具包计算一幅较小图的最大流/最小割的例子:
from pygraph.classes.digraph import digraph
from pygraph.algorithms.minmax import maximum_flow
gr = digraph()
gr.add_nodes([0, 1, 2, 3])
gr.add_edge((0, 1), wt=4)
gr.add_edge((1, 2), wt=3)
gr.add_edge((2, 3), wt=5)
gr.add_edge((0, 2), wt=3)
gr.add_edge((1, 3), wt=4)
flows,cuts = maximum_flow(gr, 0, 3)
print('flow is:', flows)
print('cut is', cuts)
创建有4个节点的有向图,4个节点的索引为0-3,用add_edge()增添边并为每条边指定特定权重,打印来的结果如下:

1.1 从图像创建图
给定一个邻域结构,就可以利用图像像素作为节点定义一个图。一个四邻域指一个像素与其正上方、正下方、左边、右边的像素直接相连。
除像素节点以外还需两个特定的节点——源点与汇点,代表图像的前景和背景。利用简单模型将其连接起来。
下面是创建这样一个图的步骤:
1、每个像素节点都有一个从源点的传入边
2、每个像素节点都有一个到汇点的传出边
3、每个像素节点都有一条传入边和传出边连接到它的近邻
分割模型可以帮助确定边的权重,像素i到像素j之间的边的权重就记为,源点到像素i的权重记为
,像素i到汇点之间的权重记为
.
为边的权重创建如下模型:
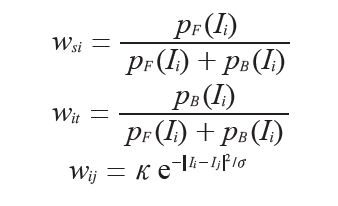
利用该模型,将每个像素和前景及背景连接起来,权重等于上面归一化后的概率。其中表示了近邻间像素的相似性,相似像素权重趋近于
,不相似的趋近于0,参数
则表示了随着不相似性的增加,指数次幂衰减到0的快慢。
下面为从一幅图像创建图的函数:
from pylab import *
from numpy import *
from PCV.classifiers import bayes
from pygraph.classes.digraph import digraph
from pygraph.algorithms.minmax import maximum_flow
def build_bayes_graph(im, labels, sigma=1e2, kappa=2):
""" 从像素四邻域建立一个图,前景和背景(前景用 1 标记,背景用 -1 标记,其他的用 0 标记)由 labels 决定,并用朴素贝叶斯分类器建模 """
m, n = im.shape[:2]
#每行是一个像素的 RGB 向量
vim = im.reshape((-1, 3))
# 前景和背景(RGB)
foreground = im[labels == 1].reshape((-1, 3))
background = im[labels == -1].reshape((-1, 3))
train_data = [foreground, background]
# 训练朴素贝叶斯分类器
bc = bayes.BayesClassifier()
bc.train(train_data)
# 获取所有像素的概率
bc_lables, prob = bc.classify(vim)
prob_fg = prob[0]
prob_bg = prob[1]
# 用 m * n +2 个节点创建图
gr = digraph()
gr.add_nodes(range(m * n + 2))
source = m * n # 倒数第二个是源点
sink = m * n + 1 # 最后一个节点是汇点
# 归一化
for i in range(vim.shape[0]):
vim[i] = vim[i] / (linalg.norm(vim[i]) + 1e-9)
# 遍历所有的节点,并添加边
for i in range(m * n):
# 从源点添加边
gr.add_edge((source, i), wt=(prob_fg[i] / (prob_fg[i] + prob_bg[i])))
# 向汇点添加边
gr.add_edge((i,sink), wt=(prob_bg[i]/(prob_fg[i]+prob_bg[i])))
# 向相邻点添加边,
if i%n != 0: # 左边存在
edge_wt = kappa*exp(-1.0*sum((vim[i]-vim[i-1])**2)/sigma)
gr.add_edge((i,i-1),wt=edge_wt)
if (i+1)%n != 0: # 右边存在
edge_wt = kappa*exp(-1.0*sum((vim[i]-vim[i-1])**2)/sigma)
gr.add_edge((i,i+1),wt=edge_wt)
if i//n != 0: # 上边存在
edge_wt = kappa*exp(-1.0*sum((vim[i]-vim[i-1])**2)/sigma)
gr.add_edge((i,i-n),wt=edge_wt)
if i//n != m-1: # 左边存在
edge_wt = kappa*exp(-1.0*sum((vim[i]-vim[i-1])**2)/sigma)
gr.add_edge((i,i+n),wt=edge_wt)
return gr
用1标记前景训练数据,-1标记背景训练数据的一幅标记图像。基于这种标记在RGB值上可以训练除一个朴素贝叶斯分类器,之后计算每一个像素的分类概率,这些计算除的分类概率便是从源点出来到汇点取的边的权重。根据这些创建一个节点为n*m+2的图。
实验代码:
from PIL import Image
from pylab import *
from numpy import *
from skimage.transform import resize
import graphcut
im = array(Image.open('D:\\picture\\test_img0\\tem1.jpg'))
im = resize(im, (50,50))
size = im.shape[:2]
# 添加两个矩形训练区域
labels = zeros(size)
labels[3:18,3:18] = -1
labels[-18:-3,-18:-3] = 1
# 创建图
g = graphcut.build_bayes_graph(im, labels, kappa=2)
# 对图像进行分割
res = graphcut.cut_graph(g, size)
figure()
graphcut.show_labeling(im,labels)
figure()
imshow(res)
gray()
axis('off')
show()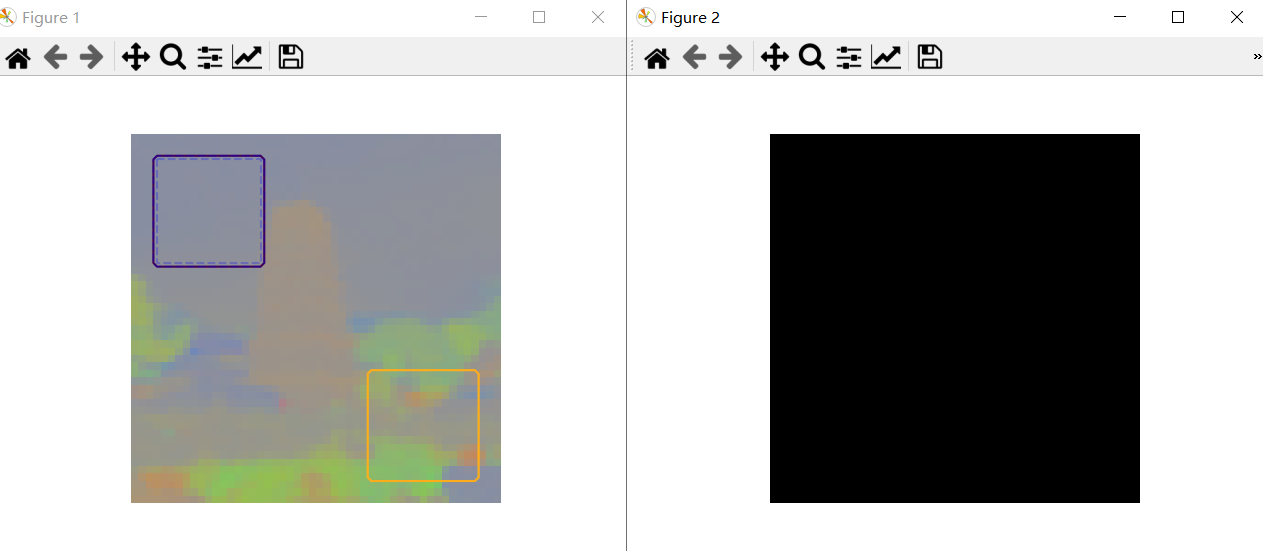
为了在图像上可视化覆盖的标记区域,利用contourf()函数填充图像等高线间的区域,参数alpha用于设置透明度。
1.2 用户交互式分割
利用一些方法可以将图割分割与用户交互结合起来,用户可以在一幅图像上为前景和背景提供一些标记。另一种就可以利用边界框选择一个包含前景的区域。
这里使用的图像是书中用的数据集图像,可以帮助评价分割性能的真实标记,并模拟用户选择矩形图像区域或用‘lasso’之类的工具来标记前景和背景的标注信息。
将用户输入编码成具有以下意义的位图图像:
| 像素值 | 意义 |
| 0.64 | 背景 |
| 128 | 未知 |
| 255 | 前景 |
from numpy import *
from scipy.misc import imresize
import graphcut
def create_msr_labels(m,lasso=False):
""" 从用户的注释中创建用于训练的标记矩阵 """
labels = zeros(im.shape[:2])
# 背景
labels[m==0] = -1
labels[m==64] = -1
#前景
if lasso:
labels[m == 255] = 1
else:
labels[m == 128] = 1
return labels
# 载入图像和注释图
im = array(Image.open('D:\\picture\\test4.jpg'))
m = array(Image.open('D:\\picture\\test4.bmp'))
# 调整大小
scale = 0.1
im = resize(im, scale, interp='biliner')
m = resize(m, scale, interp='nearest')
# 创建训练标记
labels = create_msr_labels(m,False)
# 用注释创建图
g = graphcut.build_bayes_graph(im, labels, kappa=1)
# 图割
res = graphcut.cut_graph(g, im.shape[:2])
# 去除背景部分
res[m==0] = 1
res[m==64] = 1
# 绘制分割结果
figure()
imshow(res)
gray()
xticks([])
yticks([])
savefig('D:\\picture\\library.pdf')由于scipy.misc版本的问题未能输出图像这里借用师兄的图像:
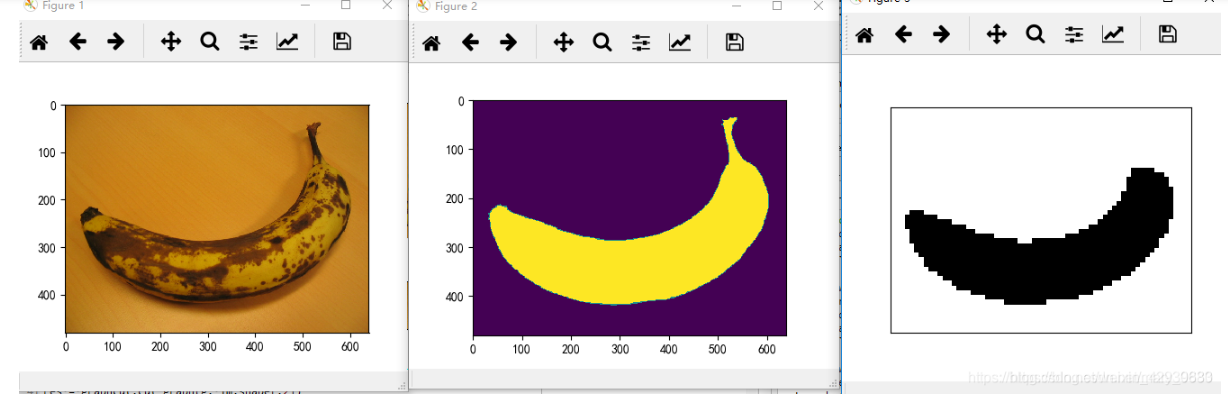
通过定义一个辅助函数用以读取这些标注图像,格式化这些标注图像便于将其传递给背景和前景训练模型函数,矩形框中只包含背景标记。上图中显示了利用RGB向量作为原始图像的特征进行分割的一些结果,一个下采样掩膜和下采样分割结果。
二、 利用聚类进行分割
上面的图割问题通过在图像的图上利用最大流/最小割找到了一种离散的解决方法。这这里将使用基于谱图理论的归一化分割算法,将像素相似和空间相似结合起来对图像进行分割。
这个方法来自定义一个分割损失函数,该损失函数不仅考虑了组的大小还用划分的大小对该损失函数进行“归一化”。归一化后为:
A,B表示两个割集,并于图中分别对A和B中所有其他节点的权重进行求和相加。 定义W为变得权重,矩阵中的元素为连接像素i和像素j边的权重。D为对w每行元素求和后构成的对角矩阵即
。归一化分割可以通过最小化下面的优化问题而求得:
y包含的是离散标记,这些离散标记满足对于b为常数的约束。
通过松弛约束条件并让y取任意实数,该问题可以变为一个容易求解的特征分解问题,缺点是需要对输出设置阈值或进行聚类,使其重新称为一个离散分割。
松弛这个问题后,就成为了求解拉普拉斯矩阵特征向量的问题:
![]()
连接像素i和像素j的边的权重就为:
![]()
第一部分度量像素之间的像素相似性,
定义为RGB向量或灰度值。第二部分度量图像中
的接近程度,
定义为每个像素的坐标矢量。在代码中体现如下:
def ncut_graph_matrix(im,sigma_d=1e2,sigma_g=1e-2):
""" 创建用于归一化割的矩阵,其中sigma_d和sigma_g是像素距离和像素相似性的权重参数"""
m,n = im.shape[:2]
N = m*n
# 归一化,并创建RGB或灰度特征向量
if len(im.shape)==3:
for i in range(3):
im[:,:,i] = im[:,:,i] / im[:,:,i].max()
vim = im.reshape((-1,3))
else:
im = im / im.max()
vim = im.flatten()
# x,y坐标用于距离计算
xx,yy = meshgrid(range(n),range(m))
x,y = xx.flatten(),yy.flatten()
# 创建边线权重矩阵
W = zeros((N,N),'f')
for i in range(N):
for j in range(i,N):
d = (x[i]-x[j])**2 + (y[i]-y[j])**2
W[i,j] = W[j,i] = exp(-1.0*sum((vim[i]-vim[j])**2)/sigma_g) * exp(-d/sigma_d)
return W
函数用于获取图像数组,并利用输入的彩色图像RGB值或灰度图像的灰度值创建一个特征向量。对于每个像素的特征向量,利用meshgrid()函数来获取x和y值,之后函数会在N个像素上循环,并在N*N归一化割矩阵W中填充值。
聚类过程的实现:
def cluster(S,k,ndim):
""" 从相似性矩阵进行谱聚类"""
# 检查对称性
if sum(abs(S-S.T)) > 1e-10:
print ('not symmetric')
# 创建拉普拉斯矩阵
rowsum = sum(abs(S),axis=0)
D = diag(1 / sqrt(rowsum + 1e-6))
L = dot(D,dot(S,D))
# 计算L的特征向量
U,sigma,V = linalg.svd(L,full_matrices=False)
# 从前ndim个特征向量创建特征向量
# 堆叠特征向量作为矩阵的列
features = array(V[:ndim]).T
# k-means
features = whiten(features)
centroids,distortion = kmeans(features,k)
code,distance = vq(features,centroids)
return code,V采用的基于特征向量图像值的K-means聚类算法,对像素进行分组,下面为利用该算法进行的实验:
from PIL import Image
from PCV.tools import ncut
from pylab import *
from numpy import *
def scipy_misc_imresize(arr, size, interp='bilinear', mode=None):
im = Image.fromarray(arr, mode=mode)
ts = type(size)
if np.issubdtype(ts, np.signedinteger):
percent = size / 100.0
size = tuple((np.array(im.size)*percent).astype(int))
elif np.issubdtype(type(size), np.floating):
size = tuple((np.array(im.size)*size).astype(int))
else:
size = (size[1], size[0])
func = {'nearest': 0, 'lanczos': 1, 'bilinear': 2, 'bicubic': 3, 'cubic': 3}
imnew = im.resize(size, resample=func[interp]) # 调用PIL库中的resize函数
return np.array(imnew)
im = array(Image.open("D:\\picture\\C-uniform01.ppm"))
m,n = im.shape[:2]
#调整图像的尺寸大小为(wid,wid)
wid = 50
rim = scipy_misc_imresize(im, (wid,wid), interp='bilinear')
rim = array(rim, 'f')
#创建归一化割矩阵
A = ncut.ncut_graph_matrix(rim,sigma_d=1,sigma_g=1e-2)
#聚类
code,V = ncut.cluster(A,k=3,ndim=3)
#变换到原来的图像大小
codeim = scipy_misc_imresize(code.reshape(wid,wid), (m,n), interp='nearest')
#绘制分割结果
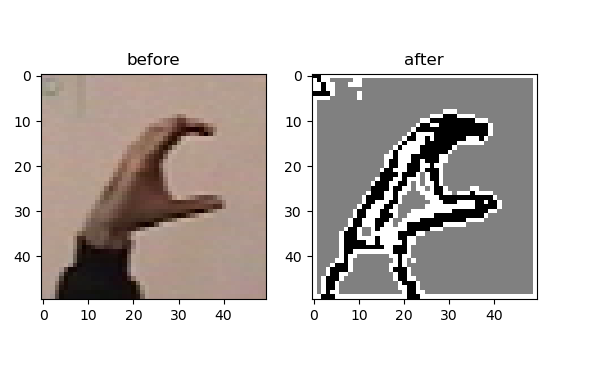
figure()
subplot(121)
imshow(im)
title('before')
subplot(122)
imshow(codeim)
title('after')
gray()
show()因为numpy中的linanlg,svd()函数在处理大型矩阵时计算方法并不快,所以重新设定图像为固定尺寸。这个例子里使用的是gesture数据库里的一幅图像分割结果如下图所示:
三、 变分法
诸如ROF降噪、K-means和SVM都是优化的问题,当优化对象是函数时,该问题又被称为变分问题,解决这类问题是算法就被称为变分法。
Chan-Vese分割模型对于待分割图像区域假定一个分片常数图像模型。集中注意前景和背景两个区域的情形。如果用一组曲线将图像分割成两个区域,分割是通过最小化Chan-Vese模型能量函数给出的:
![]()
用于度量与内部平均灰度常数和外部平均灰度常数
的偏差。
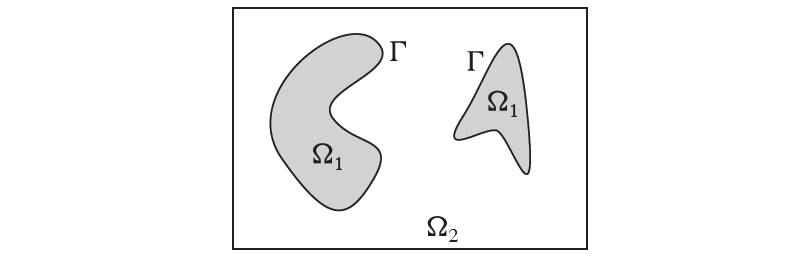
由分片常数图像 ,可将上式重写为:

是两区域
的特征函数。
将最小化Chan-Vese模型现在转变为设定阈值的ROF降噪问题:
from PIL import Image
from PCV.tools import rof
from pylab import *
import imageio
im = array(Image.open("D:\\picture\\boy_on_hill.jpg").convert('L'))
U, T = rof.denoise(im,im,tolerance=0.01)
t = 0.4 #阈值
title('Original Image')
imshow(im)
imageio.imsave('result.pdf', U < t*U.max())因为imsave的弃用这里查找资料后使用了上面的方法,但是还是出现了错误:
 具体原因目前还不清楚,有待进一步处理。
具体原因目前还不清楚,有待进一步处理。

华为开发者空间,是为全球开发者打造的专属开发空间,汇聚了华为优质开发资源及工具,致力于让每一位开发者拥有一台云主机,基于华为根生态开发、创新。
更多推荐


 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)