日常工作记录---在虚拟机中进行slam建图
今天是10月24号,首先祝各位程序员们节日快乐!!! 最近一周由于实习的原因,对ROS的探索学习,停滞了一段时间,所以今天也就没什么大的进展,本篇文章仅仅记录一下,我在虚拟机中进行slam建图可行性验证的过程,本篇文章同样使用古月学院《如何在Gazebo中实现阿克曼转向车的仿真》的课程资料来进行验证 下面各条之间并没有严格的顺序关系,每一条都是独立的,都是我在验证过程中的经验或者记录
今天是10月24号,首先祝各位程序员们节日快乐!!!
最近一周由于实习的原因,对ROS的探索学习,停滞了一段时间,所以今天也就没什么大的进展,本篇文章仅仅记录一下,我在虚拟机中进行slam建图可行性验证的过程,本篇文章同样使用古月学院《如何在Gazebo中实现阿克曼转向车的仿真》的课程资料来进行验证
下面各条之间并没有严格的顺序关系,每一条都是独立的,都是我在验证过程中的经验或者记录:
1、在运行roslaunch bringup racecar_gazebo_rviz.launch之前同样需要先运行export SVGA_VGPU10=0,否则我的gazebo中无法正常加载模型(已经是最新版本)
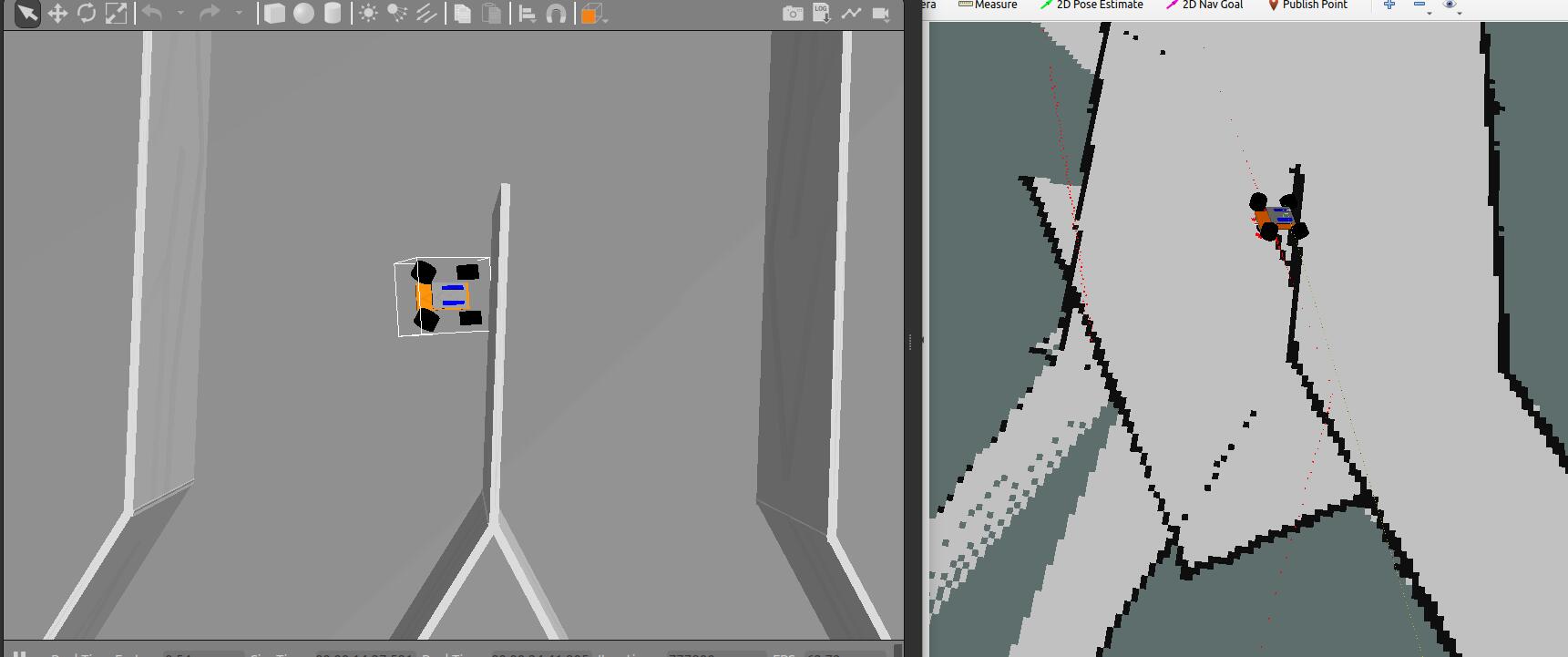
2、使用键盘控制阿克曼仿真小车运动时一定要专心,一不小心可就翻车了,先放一下建图过程中的动态图:

由于限制图片大小,只能放很小的一部分,接下来放一下我从开始建图,到翻车的记录视频吧(一不留神就翻车,哈哈):
日常翻车记录
3、我的电脑内存是32GB的,分配给虚拟机16GB,建图过程很流畅,在建图时如果打开rqt_tf_tree貌似感觉建图变慢了,关掉后感觉好一些
4、若是没能正确启动launch文件可能会,rviz可能会弹出警告:MessageFilter [target=odom ]: Dropped 100.00% of messages so far.,此时rviz并不能正常建图,可以运用rqt_tf_tree工具检查tree的是否正常,输入以下指令查看当前的tree
rosrun rqt_tf_tree rqt_tf_tree
本文例子中正常的tree如下所示(点击或拖动可查看放大图 ):

5、经过一顿操作,图总算是建好了,如下所示:

6、我们可以把已经建好的图保存下来,这里需要用到map-server功能包,之前没装过的需要执行下面这条语句安装一下(我用的是ubuntu20.04对应的是noetic版本):
sudo apt-get install ros-noetic-map-server
安装完成后就可以运行以下指令保存建好的地图了
rosrun map_server map_saver -f /home/jzx/catkin_ws/src/ackerman_sim/bringup/map/map2
注意上面指令中的/home/jzx/catkin_ws/src/ackerman_sim/bringup/map/是要保存在的路径,最后的map2是保存后生成文件的文件名,大家根据需要自己的情况进行修改
执行后会生成两个文件一个是建图的图片,另一个是建图的数据信息,保存在yaml文件中:

emmm。。。。貌似效果还不错,今天的记录就到这里了,下次再见

华为开发者空间,是为全球开发者打造的专属开发空间,汇聚了华为优质开发资源及工具,致力于让每一位开发者拥有一台云主机,基于华为根生态开发、创新。
更多推荐



 4
4 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)