android ros 节点编写_ROS学习笔记——初识源代码
ROS系统中的节点功能由CPP源代码或者python脚本决定,也就是说ROS节点中功能需要编程完成。在我看来,学习任何一门编程语言或者编程方法,最重要的是“敲代码”;当然,一些复杂的底层库文件可以直接copy,但主程序务必要亲手敲下来,只有这个过程能够很有效的锻炼阅读代码和理解代码结构的能力;同时:这一“敲代码”过程最大的价值在于:自己敲出来的代码会出现各种各样的bug,如何去独自...
ROS系统中的节点功能由CPP源代码或者python脚本决定,也就是说ROS节点中功能需要编程完成。在我看来,学习任何一门编程语言或者编程方法,最重要的是“敲代码”;当然,一些复杂的底层库文件可以直接copy,但主程序务必要亲手敲下来,只有这个过程能够很有效的锻炼阅读代码和理解代码结构的能力;同时:这一“敲代码”过程最大的价值在于:自己敲出来的代码会出现各种各样的bug,如何去独自解决这些bug才是初学编程最大的收获。
首次编写代码的功能是:针对ROS中经典的turtlesim_node“小海龟”例子,在“小海龟”运行后,运行velocity_publisher节点以每秒10次的频率发布名为/turtle1/cmd_vel的话题,控制小乌龟x轴和z轴运动的角速度,同时发布当前角度控制信息;再运行pose_subscriber节点,对“小海龟”的位置信息进行订阅并打印。节点结构图如下:
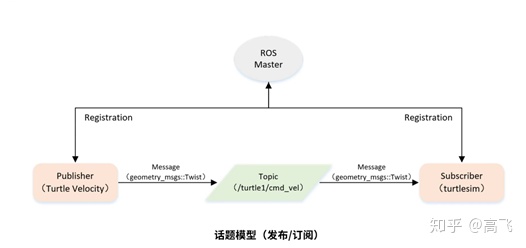
其中,velocity_publisher节点用于发布速度控制话题,该节点源码编写过程如下:
1. 创建功能包 (创建文件夹、添加依赖)
$ cd ~catkin_ws/src
#进入catkin_ws/src文件路径
$ catkin_create_pkg learn_topic roscpp rospy std_msgs geometry_msgs turtlesim
#创建名为learn_topic 的功能包,并添加依赖
2. 在src文件夹中新建velocity_publisher.cpp文件,写入代码:
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>//包含头文件
int main(int argc, char **argv)
{
//节点初始化
ros::init(argc, argv, "velocity_publisher");
//创建节点句柄
ros::NodeHandle n;
//创建一个发布者,名为/turtle1/cmd_vel的话题
ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel",10);
//设置循环的频率
ros::Rate loop_rate(10);
while (ros::ok())
{
/* code for loop body */
//初始化geometry_msgs::Twist消息类型
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
//发布消息
turtle_vel_pub.publish(vel_msg);
ROS_INFO("publish turtle velocity comand[%0.2f m/s,%0.2f rad/s]",vel_msg.linear.x,vel_msg.angular.z);//格式化输出当前速度控制信息
loop_rate.sleep();//循环延迟
}
return 0;
}
3. 在Cmakelist.txt文件中,build控制区域下写入如下命令,告诉系统编译时使用CPP代码
add_executable(velocity_publisher src/velocity_publisher.cpp)
#把CPP文件编译成可执行文件
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
#把可执行文件与ROS的库进行链接4. 执行编译命令:catkin_make 再执行:source devel/setup.bash
5. 若编译通过,即可依次执行(需catkin_ws路径下开启3个终端,每个终端执行一个命令)
$ roscore #启动ROS
$ rosrun tuetlesim turtlesim_node #启动“小乌龟”节点
$ rosrun learn_topic velocity_publisher #启动刚才编写的速度控制程序
以上是CPP代码的执行过程,python程序运行过程如下:
在learn_topic文件夹下建立script文件夹,并新建python脚本文件velocity_publisher.py 。写入以下代码:(笔者并不熟练python代码,故不详写注释)
import rospy
from geometry_msgs.msg import Twist
def velocity_publisher():
rospy.init_node('velocity_publisher',anonymous=True) #
turtle_vel_pub = rospy.Publisher('/turtle1/cmd_vel',Twist,queue_size=10)
rate = rospy.Rate(10) #set the frequency of circulation
while not rospy.is_shutdown():
vel_msg = Twist()
vel_msg.linear.x = 0.5
vel_msg.angular.z = 0.2
turtle_vel_pub.publish(vel_msg) #publish meseage
rospy.loginfo("publish turtle velocity comand[%0.2f m/s,%0.2f rad/s]",vel_msg.linear.x,vel_msg.angular.z)#print the information of the control-order
rate.sleep() #delay
if __name__ == '__main__':
try:
velocity_publisher()
except rospy.ROSInterruptException:
passP:这里注释使用的是英文,因为在这里python默认不支持中文字符,如果使用中文就会出现报错:SyntaxError: Non-ASCII character 'xe5' in file
运行python脚本的方式为:(需catkin_ws路径下开启2个终端,分别执行前两个命令,再于velocity_publisher.py文件所在路径打开终端,运行第三个命令)
$ roscore #启动ROS
$ rosrun tuetlesim turtlesim_node #启动“小乌龟”节点
$ python velocity_publisher.py #运行脚本
两种方式运行结果都是下图所示:
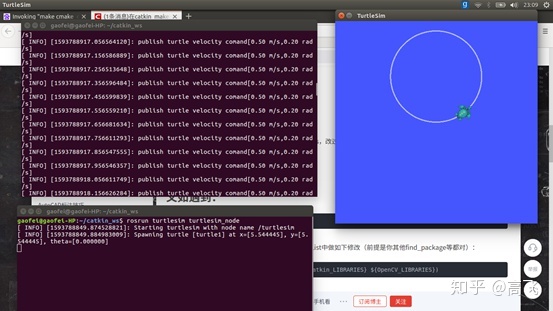
使用CPP文件和python脚本最直观的区别是,python脚本无需编译即可运行。需要注意的是:py文件需要设置属性-权限-允许作为程序执行文件
pose_subscriber节点类似上述步骤,在src中新建CPP文件,写入代码:
#include<ros/ros.h>
#include<turtlesim/Pose.h>//
void poseCallback(const turtlesim::Pose::ConstPtr& msg)
{
ROS_INFO("Turtle pose: x:%0.6f y:%0.6f",msg->x,msg->y);//格式化输出位置信息
}
int main(int argc, char *argv[])
{
ros::init(argc,argv,"pose_subscriber");
ros::NodeHandle n;
ros::Subscriber pose_sub = n.subscribe("/turtle1/pose",10,poseCallback);//订阅消息
ros::spin();//循环等待
return 0;
}同样需要修改Cmakelist.txt文件,方法参照上述velocity_publisher例子,编译后先启动“小海龟”,在键入rosrun learn_topic pose_subscriber即可订阅小海龟位置信息。
同一功能的Python脚本代码如下:
import rospy
from turtlesim.msg import Pose
def poseCallback(msg):
rospy.loginfo("Turtle pose: x:%0.6f y:%0.6f",msg.x,msg.y)
def pose_subscriber():
rospy.init_node('pos_subscriber',anonymous=True)
rospy.Subscriber("/turtle1/pose",Pose,poseCallback)
rospy.spin()
if __name__ == '__main__':
pose_subscriber()两种源码运行结果均为:
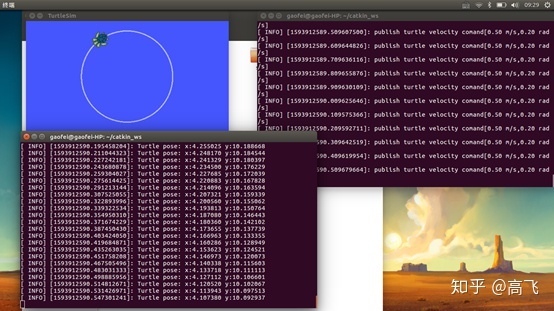
其中:右上方为velocity_publisher节点输出信息,左下方为pose_subscriber输出信息。
launch文件:
由于需要启动3个节点,整个操作过程相当繁琐,这里可以使用编写launch文件来同时启动turtlesim_node、velocity_publisher、pose_subscriber节点。
launch文件创建:在learntopic 文件夹下创建launch文件夹,在该文件夹内新建turtle_c.launch文件,文件内写入代码:
<launch>
<node pkg="turtlesim" name="turtlesim_node" type="turtlesim_node"/>
<node pkg="learn_topic" name="velocity_publisher" type="velocity_publisher" output="screen"/>
<node pkg="learn_topic" name="pose_subscriber" type="pose_subscriber" output="screen"/>
</launch>launch文件运行:
进入turtle_c.launch所在文件路径打开终端,输入命令:
$ roslaunch turtle_c.launch即可一次运行三个节点。
其中:pkg:是节点所在的 package 名称 type :是 package 中的可执行文件,如果是 python 编写的,就可能是 .py 文件,如果是 c++ 编写的,就是源文件编译之后的可执行文件的名字。name :是节点启动之后的名字, 每一个节点都要有自己独一无二的名字。output :默认情况下,launch 启动 node 的信息会存入下面的 log 文件中/.ros/log/run_id/nodename-number-stdout.log,可以使用output="screen"把输出信息显示出来,即如果不加这个命令,终端就不会输出ROS_INFO信息。
除了上述的命令,还有下列加黑的命令
<launch>
<node
pkg=""
type=""
name=""
output="screen"
respawn="true"
required="true"
launch-prefix="xterm -e"
ns="some_namespace"
/>
</launch>respawn:若该节点关闭,是否自动重新启动required:若该节点关闭,是否关闭其他所有节点launch-prefix: 是否新开一个窗口执行。例如,需要通过窗口进行机器人移动控制的时候,应该为控制 node 新开一个窗口;或者当 node 有些信息输出,不希望与其他 node 信息混杂在一起的时候。ns:将 node 归入不同的 namespace,即在 node name 前边加 ns 指定的前缀。为了实现这类操作,在 node 源文件中定义 node name 和 topic name 时要采用 relative name, 即不加slash符号 /.
注意: roslaunch 不能保证 node 的启动顺序。
笔者水平有限,如有错误,欢迎批评指正。
参考:
古月居ROS入门 https://www. bilibili.com/video/BV1z t411G7Vn?from=search&seid=7539767518806364892
launch文件简介 https://www. jianshu.com/p/e55850b87 c7d

华为开发者空间,是为全球开发者打造的专属开发空间,汇聚了华为优质开发资源及工具,致力于让每一位开发者拥有一台云主机,基于华为根生态开发、创新。
更多推荐



 0
0 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)