速腾Helios-16P使用Lego-loam实时构建点云地图(四)——使用速腾Helios-16P雷达录bag包并通过lego-loam离线建图
上面这个图是相机融合IMU的bag包,我们可以看到5个话题(topics),由于这是相机数据,我们在rviz中的add中选择image,然后在添加的image中的Image Topic写上话题名称,如/cam00/image_raw这个话题,这里有4个相机数据,所以我们添加4次image,每个Image Topic写上对应的话题,再播放需要的bag包就可以在rviz中看到了可视化的数据。当确定好雷
·
步骤一:连接硬件
步骤二:设置电脑IP
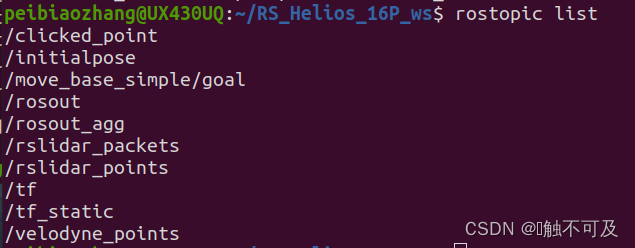
步骤三:运行雷达
cd RS_Helios_16P_ws
source devel/setup.bash
roslaunch rslidar_sdk start.launch步骤四:查看话题
rostopic list
步骤五:开始录包(这一步是把所有的话题都填上还是只填一个velodyne_points,我这个门外汉也不清楚,只录velodyne_points也能通过lego-loam建图)
rosbag record -o out /velodyne_pointsCtrl+C结束录包后就可以在当前文件夹下看到bag。
步骤六:使用雷达实时建图需要修改lego-loam的launch文件
打开~/lego-loam_ws/src/LeGO-LOAM/LeGO-LOAM/launch/run.launch文件,将<param name="/use_sim_time" value="true" />的false改为true(用雷达实时运行lego-loam则将true改为false)。
步骤七:运行lego-loam
cd lego-loam_ws
source devel/setup.bash
roslaunch lego_loam run.launch步骤八:播放数据集
为lego-loam播放bag包时,要加上--clock:
rosbag play -o out 包名.bag --clock我们也可以加上相关参数:
rosbag play --pause XXX.bag #以可暂停方式播放bag
其他选项:--topic /topic1 /topic2 指定播放话题 | -r (rate) 指定播放速度倍率
如何保存lego-loam建好的图参考此系列博客(三):
 https://blog.csdn.net/qq_59475883/article/details/130254414?spm=1001.2014.3001.5502
https://blog.csdn.net/qq_59475883/article/details/130254414?spm=1001.2014.3001.5502关于通过rviz直接播放bag参考我之前的博客:

华为开发者空间,是为全球开发者打造的专属开发空间,汇聚了华为优质开发资源及工具,致力于让每一位开发者拥有一台云主机,基于华为根生态开发、创新。
更多推荐



 2
2 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)