STM32硬件I2C与软件模拟I2C超详解
I2C协议时序详细解剖,硬件I2C的实现,已经软件模拟I2C的实现,以及EEPROM的详细介绍
✅作者简介:嵌入式入坑者,与大家一起加油,希望文章能够帮助各位!!!!
📃个人主页:@rivencode的个人主页
🔥系列专栏:玩转STM32
💬保持学习、保持热爱、认真分享、一起进步!!!
一.I2C协议简介
I2C 通讯协议(Inter-Integrated Circuit)是由 Phiilps 公司开发的,由于它引脚少,硬件实现简单,可扩展性强,不需要 USART、CAN 等通讯协议的外部收发设备(那些电平转化芯片),现在被广泛地使用在系统内多个集成电路(IC)间的通讯。
I2C只有一跟数据总线 SDA(Serial Data Line),串行数据总线,只能一位一位的发送数据,属于串行通信,采用半双工通信
- 半双工通信:可以实现双向的通信,但不能在两个方向上同时进行,必须轮流交替进行,其实也可以理解成一种可以切换方向的单工通信,同一时刻必须只能一个方向传输,只需一根数据线.
对于I2C通讯协议把它分为物理层和协议层物理层规定通讯系统中具有机械、电子功能部分的特性(硬件部分),确保原始数据在物理媒体的传输。协议层主要规定通讯逻辑,统一收发双方的数据打包、解包标准(软件层面)。
二.I2C物理层
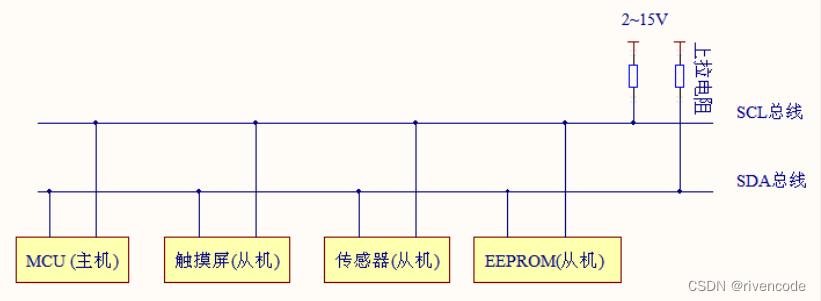
I2C 通讯设备之间的常用连接方式

(1) 它是一个支持设备的总线。“总线”指多个设备共用的信号线。在一个 I2C 通讯总线中,可连接多个 I2C 通讯设备,支持多个通讯主机及多个通讯从机。
(2) 一个 I2C 总线只使用两条总线线路,一条双向串行数据线SDA(Serial Data Line ),一条串行时钟线SCL(Serial Data Line )。数据线即用来表示数据,时钟线用于数据收发同步
(3) 总线通过上拉电阻接到电源。当 I2C 设备空闲时会输出高阻态,而当所有设备都空闲,都输出高阻态时,由上拉电阻把总线拉成高电平。
什么是普通的开漏输出详情请参考–》GPIO端口的八种工作模式

开漏输出PMOS不工作
1.当输出寄存器输出高电平,引脚输出高阻态相当于(开路),假设该引脚接到I2C的SDA总线上,则总线被默认拉成高电平。
2.当输出寄存器输出低电平,引脚输出低电平。


复用功能开漏输出
复用功能模式中,输出使能,输出速度可配置,可工作在开漏模式, 但是输出信号源于其它外设(来自I2C外设),输出数据寄存器 GPIOx_ODR 无效;输入可用,可以通过输入数据寄存器可获取 I/O 实际状态,但一般直接用外设的寄存器来获取该数据信号
这里SMT32,I2C外设的两个引脚SDA,SCL就要配置成复用功能的开漏输出模式,输出信号源于I2C外设。
为什么引脚要设置成开漏模式
以及为什么两根总线要上拉电阻接高电平,总线默认情况是高电平,详情看下图。

为什么要设备空闲的时候SDA与SCL引脚要输出高阻态(相当于断开与SDA与SCL总线的连接),根本目的就是为了不干扰其他正在通信的设备。
(4) 多个主机同时使用总线时,为了防止数据冲突,会利用仲裁方式决定由哪个设备占用总线,也就是设备在发送数据之前会检测I2C总线是否忙碌(忙碌总线应该为低电平)。
(5)I2C 具有三种传输模式:标准模式传输速率为 100kbit/s ,快速模式为 400kbit/s ,高速模式下可达 3.4Mbit/s,但目前大多 I2C 设备尚不支持高速模式。
每个连接到总线的设备都有一个独立的地址,主机可以利用这个地址进行不同设备之间的访问的,地址也是一个数据,主机可以同过SDA发送这个地址出去,则挂载在总线上的设备会自行匹配,匹配成功之后就可以互相通信了
三.I2C协议层
STM32即可以作为主机,也可以做为从机,我主要介绍STM32作为主机如何进行读写数据。
I2C规定通信时的时钟,起始信号,停止信号只能由主机产生
下面以STM32做为主机,EEPROM存储器作为从机举例
I2C 基本读写过程
- 1.主机写数据到从机

这里发送完最后一个字节时,主机不一定要接收到从机发送的非应答信号才可以发送停止信号,就算从机应答了主机也可以直接发送停止信好终止通讯
其中 S 表示由主机的 I2C 接口产生的传输起始信号(S),这时连接到 I2C 总线上的所有从机都会接收到这个信号。起始信号产生后,所有从机就开始等待主机紧接下来 广播(由SDA线传输数据)
从机地址(SLAVE_ADDRESS)。在 I2C 总线上,每个设备的地址都是唯一的,当主机广播的地址与某个设备地址相同时,这个设备就被选中了,没被选中的设备将会忽略之后的数据信号(引脚输出高阻态与两根总线断开连接)。
根据 I2C 协议,这个从机地址可以是 7 位或 10 位,从机接收到匹配的地址后,主机或从机会返回一个应答(ACK)或非应答(NACK)信号,只有接收到应答信号后,主机才能继续发送或接收数据。
在地址位之后,是传输方向的选择位,表示后面的数据传输方向
该位为 0 时:主机向从机写数据。
该位为 1 时:主机由从机读数据。
- 2.主机向从机读取数据

记住,数据接收方要产生应答信号(代表我还要数据)或非应答信号(我不要要数据了),不一定就是主机或从机某一个产生。
- 3.读和写数据混合格式

第一次通讯是确定读写从机设备内部寄存器或存储器的地址,第二次则是读或写上一次确定内部寄存器或存储器的地址上面的数据。
1.空闲状态
I2C总线的SDA和SCL两条信号线同时处于高电时,则为总线空闲状态,所有挂载在总线上的设备都输出高阻态(相当于断开与总线的连接),两条总线被上拉电阻的把电平拉高。
2.起始信号与停止信号

起始信号:当SCL 线在高电平期间 SDA 线从高电平向低电平切换。
停止信号:当SCL线在高电平期间 SDA 线由低电平向高电平切换。
注意:
起始信号和停止信号是在SCL 是高电平期间,SDA线电平切换的过程,而不是单纯的高低电平。
起始和停止信号只能由主机产生。
3.数据有效性


SDA数据线在 SCL 的每个时钟周期(时钟脉冲)传输一位数据。
-
SCL为高电平期间:SDA 表示的数据有效,此时SDA的电平要稳定,SDA 为高电平时表示数据“1”,为低电平时表示数据“0”。
-
SCL为低电平期间:SDA 的数据无效,一般在这个时候 SDA 进行
电平切换,为下一次表示数据做好准备。

数据和地址按8位/字节进行传输,先传输数据的高位,每次传输的字节数不受限制。
4.地址及数据方向
I2C 总线上的每个设备都有自己的独立地址,主机发起通讯时,通过 SDA 信号线发送设备地址(SLAVE_ADDRESS)来查找从机。I2C 协议规定设备地址可以是 7 位或 10 位,实际中 7 位的地址应用比较广泛。紧跟设备地址的一个数据位用来表示数据传输方向,第 8 位或第 11 位。
- 数据方向位为“1”:表示主机由从机读数据
- 数据方向位为“0”:表示主机向从机写数据

读数据方向时,主机会释放对 SDA 信号线的控制,由从机控制 SDA 信号线(向主机发送数据),主机接收信号,写数据方向时,SDA 由主机控制(向从机发送数据),从机接收信号。
5.应答与非应答信号
I2C 的数据和地址传输都带响应。响应包括“应答(ACK)”和“非应答(NACK)”两种信号。作为数据接收端时,当数据接收端(无论主从机)接收到 I2C 传输的一个字节数据或地址后,若希望对方继续发送数据,则需要向对方发送“应答(ACK)”信号,发送方会继续发送下一个数据;若接收端希望结束数据传输,则向对方发送“非应答(NACK)”信号,发送方接收到该信号后会产生一个停止信号,结束信号传输。
在一个字节传输的8个时钟后的第9个时钟期间,接收器必须回送一个应答位(ACK)或者是非应答位(NACK)给发送器。

在第 9 个时钟时,数据发送端会释放 SDA 的控制权,由数据接收端控制 SDA,给发送端传输应答或非应答信号
-
SDA 为高电平:表示非应答信号(NACK)
-
SDA为低电平:表示应答信号(ACK)
为什么数据发送端要释放 SDA 的控制权(将SDA总线置为高电平)

四.硬件I2C
在讲硬件I2C之前不得不吐槽一下这个硬件I2C外设,有时候就突然会卡在某个事件的检测,需要关闭电源重新启动才有用,不过虽然可能硬件I2C可能会有问题,可能以后不一定用的到但是我们主要是学习如何用硬件实现I2C协议,对我们以后学别的协议肯定会有帮助。
-
硬件 I2C:是指直接
利用 STM32 芯片中的硬件 I2C 外设,该硬件 I2C 外设跟 USART串口外设类似,只要配置好对应的寄存器,外设就会产生标准串口协议的时序。使用它的I2C 外设则可以方便地通过外设寄存器来控制硬件I2C外设产生 I2C 协议方式的通讯,而不需要内核直接控制引脚的电平。 -
软件模拟I2C:即直接使用CPU内核按照 I2C 协议的要求控制GPIO输出高低电平。如控制产生 I2C 的起始信号时,先控制作为 SCL 线的 GPIO 引脚输出高电平,然后控制作为 SDA 线的GPIO引脚在此期间完成由高电平至低电平的切换,最后再控制SCL 线切换为低电平,这样就输出了一个标准的 I2C 起始信号。
硬件 I2C 直接使用外设来控制引脚,可以减轻 CPU 的负担。不过使用硬件I2C 时必须使用某些固定的引脚作为 SCL 和 SDA,软件模拟 I2C 则可以使用任意 GPIO 引脚,相对比较灵活。
I2C外设功能框图(重点)

1.通信引脚
STM32中有两个I2C外设,硬件I2C必须要使用这些引脚,因为这些引脚才连接到I2C引脚,就比如说PB6与PB7引脚就连接到芯片内部的I2C1外设。

就拿正点原子的STM32mini版为例,主机(stm32)使用PB6,PB7作为SCL与SDA引脚,但是PB6,PB7并没有连接到我们要通信的EEPROM的SCL,SDA引脚组成I2C总线,而是PC12与PC11连接到了EEPROM的SCL,SDA引脚,所以我们要把PB6与PB7引脚用杜邦线连接到PC12与PC11,这样就间接将PB6,PB7连接到EEPROM的SCL,SDA引脚上,组成I2C总线。
这一步十分重要,如果你用的I2C1外设与EEPROM通信而没有把PB6,PB7连接到EEPROM的SCL,SDA引脚上不然你代码写出花来都没有用。
原理图:

实物图:

2.时钟控制逻辑

时钟控制寄存器



这里解释一下为什么是用Tpclk1,因为I2C1外设是挂载在APB1总线上的

这里只是演示一下这么计算寄存器写入的值,用库函数我们只要配置好相应寄存器的参数,库函数会帮我计算自动写入的,不要慌。
3.数据控制逻辑

-
当向外发送数据的时候,数据移位寄存器以“数据寄存器”为数据源,把数据一位一位地通过SDA信号线发送出去;
-
当从外部接收数据的时候,数据移位寄存器把SDA信号线采样到的数据一位一位地存储到“数据寄存器”中。
然后通过CPU或DMA向数据寄存器写入或者读出数据(一般保存在一个数组当中)。
数据寄存器DR

自身地址寄存器1


4.整体控制逻辑
这里挑一些重点的寄存器位,我们只需配置好寄存器就可以让I2C外设硬件逻辑自动控制SDA,SCL总线去产生I2C协议的时序如:起始信号、应答信号、停止信号等等




接下来就是了解的知识:
- 总线错误(BERR)
在一个地址或数据字节传输期间,当I2C接口检测到一个外部的停止或起始条件则产生总线错误。此时:
● BERR位被置位为’1’;如果设置了ITERREN位,则产生一个中断;
● 在从模式情况下,数据被丢弃,硬件释放总线:
─ 如果是错误的开始条件,从设备认为是一个重启动,并等待地址或停止条件。
─ 如果是错误的停止条件,从设备按正常的停止条件操作,同时硬件释放总线。
● 在主模式情况下,硬件不释放总线,同时不影响当前的传输状态。此时由软件决定是否要中止当前的传输

主机模式与从机模式

- 应答错误(AF)
当STM32检测到一个无应答位时,产生应答错误。此时:
● AF位被置位,如果设置了ITERREN位,则产生一个中断;
● 当发送器接收到一个NACK时,必须复位通讯:
─ 如果是处于从模式,硬件释放总线。
─ 如果是处于主模式,软件必须生成一个停止条件。

- 过载/欠载错误(OVR)
在从模式下,如果禁止时钟延长,I2C接口正在接收数据时,当它已经接收到一个字节(RxNE=1),但在DR寄存器中前一个字节数据还没有被读出,则发生过载错误。此时:
● 最后接收的数据被丢弃;
● 在过载错误时,软件应清除RxNE位,发送器应该重新发送最后一次发送的字节。
在从模式下,如果禁止时钟延长,I2C接口正在发送数据时,在下一个字节的时钟到达之前,新的数据还未写入DR寄存器(TxE=1),则发生欠载错误。此时:
● 在DR寄存器中的前一个字节将被重复发出;
● 用户应该确定在发生欠载错时,接收端应丢弃重复接收到的数据。发送端应按I2C总线标准在规定的时间更新DR寄存器。
在发送第一个字节时,必须在清除ADDR之后并且第一个SCL上升沿之前写入DR寄存器;如果不能做到这点,则接收方应该丢弃第一个数据
STM32做为从机时写入数据和读出数据时应该连续,取个例子主机要10个字节的数据而你只发5个字节此时就发生欠载错误:在下一个字节的时钟到达之前,新的数据还未写入DR寄存器



5.STM32的I2C外设通信过程(超级重要)
I2C模式选择:
接口可以下述4种模式中的一种运行:
● 从发送器模式
● 从接收器模式
● 主发送器模式
● 主接收器模式
该模块默认地工作于从模式。接口在生成起始条件后自动地从从模式切换到主模式;当仲裁丢失或产生停止信号时,则从主模式切换到从模式。允许多主机功能。
- 主模式:STM32作为主机通信(发送器与接收器)
- 从模式:STM32作为从机通信(发送器与接收器)
这里我主要将STM32做为主机通信
I2C主模式:
默认情况下,I2C接口总是工作在从模式。从从模式切换到主模式,需要产生一个起始条件。
在主模式时,I2C接口启动数据传输并产生时钟信号。串行数据传输总是以起始条件开始并以停止条件结束。当通过START位在总线上产生了起始条件,设备就进入了主模式。
主发送器

- EV5事件

起始条件当BUSY=0时,设置START=1,I2C接口将产生一个开始条件并切换至主模式(M/SL位置位)

一旦发出开始条件,我们需要检测SB是否置1,判断是否成功发送起始信号

● SB位被硬件置位,如果设置了ITEVFEN位,则会产生一个中断。
然后主设备等待读SR1寄存器,紧跟着将从地址写入DR寄存器
- EV6事件

从机地址的发送
● 在7位地址模式时,只需送出一个地址字节。
一旦该地址字节被送出,
─ ADDR位被硬件置位,如果设置了ITEVFEN位,则产生一个中断。
随后主设备等待一次读SR1寄存器,跟着读SR2寄存器。
根据送出从地址的最低位,主设备决定进入发送器模式还是进入接收器模式
● 在7位地址模式时,
─ 要进入发送器模式,主设备发送从地址时置最低位为’0’。
─ 要进入接收器模式,主设备发送从地址时置最低位为’1’

从机地址发送完成从机应答之后检测EV6事件:

确保从机应答,之后才传输下一个数据,如果你不检测万一地址发送失败或者从机无应答,直接就开始传输数据那传给谁??
-
EV8_1事件:

这个检测是地址发送完之后进行检测,其实我们只要检测EV6事件就可以了,因为EV6事件成功之后就已经代表地址(数据)发送出去,而且从机还应答了,地址已经发送完成那肯定数据寄存器,与移位寄存器肯定为空呐,所以不检测也可以。 -
EV8事件


我们在发送完一个数据之后必须判断数据寄存器是否为空,数据寄存器为空(TXE),才能向数据寄存器写入新的数据,不然上一个数据们还没有转移到移位寄存器,CPU又写入一个数据则会覆盖上一个数据。

-
EV8_2事件

在我们发送完最后一个字节之后我们应该检测EV8_2事件,主要检测BTF位。

为什么呢,主要是检测数据移位寄存器的数据全部发送完成,则才算最后一个字节全部发送完毕。 -
关闭通信
在DR寄存器中写入最后一个字节后,通过设置STOP位产生一个停止条件,然后I2C接口将自动回到从模式(M/S位清除)。
主接收器

因为虽然STM32做为接收器,但是STM32是主机,起始信号与发送从机地址都是必须由主机干的活,所以前面EV5,EV6,EV6_1事件与主接收器是一模一样
- EV7事件

主机使能ACK位就可以自动接收完数据产生应答信号。

接收数据之前,判断数据寄存器是否有数据,也就数据寄存器非空(RNXE),CPU就可以读取数据寄存器中的数据啦。
- EV7_1事件
关闭通信
主设备在从设备接收到最后一个字节后发送一个NACK。接收到NACK后,从设备释放对SCL和SDA线的控制;主设备就可以发送一个停止/重起始条件。
● 为了在收到最后一个字节后产生一个NACK脉冲,在读倒数第二个数据字节之后(在倒数第二个RxNE事件之后)必须清除ACK位。
● 为了产生一个停止/重起始条件,软件必须在读倒数第二个数据字节之后(在倒数第二个RxNE事件之后)设置STOP/START位。
● 只接收一个字节时,刚好在EV6之后(EV6_1时,清除ADDR之后)要关闭应答和停止条件的产生位。在产生了停止条件后,I2C接口自动回到从模式(M/SL位被清除)
这里产生一个NACK其实就是清除ACK位,将ACK位置0,后面接收的一个字节不在产生应答就是非应答咯

然后主机产生停止信号

然后通过判断EV7事件,CPU向数据寄存器读取最后一个字节数据
硬件I2C写代码必须熟练掌握和理解主发送器和主接收器的过程,只要你理解了写代码还不是信手拈来,简简单单,然后写代码你会发送就是上面的过程一模一样
6.I2C初始化结构体

- I2C_ClockSpeed
设置I2C的传输速率,我们写入的这个参数值不得高于400KHz。
在调用初始化函数时,函数会根据我们输入的数值,以及后面输入的占空比参数,经过运算后把时钟因子写入到I2C的时钟控制寄存器CCR。
CCR寄存器不能写入小数类型的时钟因子,影响到SCL的实际频率可能会低于本成员设置的参数值,这时除了通讯稍慢一点以外,不会对I2C的标准通讯造成其它影响。

初始化函数

- I2C_Mode
选择I2C的使用方式,有I2C模式(I2C_Mode_I2C )和SMBus主、从模式(I2C_Mode_SMBusHost、 I2C_Mode_SMBusDevice ) 。

- I2C_DutyCycle
设置I 2 C的SCL线时钟的占空比。该配置有两个选择,分别为低电平时间比高电平时间为2:1 ( I2C_DutyCycle_2)和16:9(I2C_DutyCycle_16_9)。
这个模式随便选反正区别不大。

- I2C_OwnAddress1
配置STM32的I2C设备自己的地址,每个连接到I2C总线上的设备都要有一个自己的地址,作为主机也不例外。
地址可设置为7位或10位,只要该地址是I2C总线上唯一的即可。
其实可以有两个地址,这里是设置的第一个地址。
第二个地址要另外用库函数设置而且只能是7位

- I2C_Ack_Enable
配置I 2 C应答是否使能,设置为使能则可以发送响应信号。一般配置为允许应答(I2C_Ack_Enable)若STM32接收一个字节数据自动产生应答,必须要使能

- I2C_AcknowledgeAddress
选择I2C的寻址模式是7位还是10位地址。这需要根据实际连接到I2C总线上设备的地址进行选择,这个成员的配置也影响到I2C_OwnAddress1成员,只有这里设置成10位模式时,I2C_OwnAddress1才支持10位地址。

配置完成之后调用一下I2C初始化函数就搞定
记得使能I2C外设


五.EEPROM简介
EEPROM全称: electrically-erasable, and programmable read-only memory --》可电擦除的可编程的只读存储器,这里的只读并不是只能读,是以前ROM不能写只能读,现在的EEPROM已经是可读写的啦,为什么还叫可读:只不过是保留下来的名字而已。

原理图:


WP引脚直接

EEPROM的设备地址(作为从机)

EEPROM中硬件I2C

EEPROM通信的时候也遵循I2C协议,向产生起始信号,停止信号,应答什么的都一样的。
1.STM32向从机EEPROM写入一个字节

2.STM32向从机EEPROM写入多个字节(页写入)

写入的8个字节是连续的地址,不连续的话不能使用页写入


总结:
- 进行页写入时,写入的存储器地址要对齐到8,也就是说只能写入地址为 0 8 16 32… 能整除8
- 页写如只能一次写入8个字节
规定就是规定我也没有办法,不然就会出错
- 确认EEPROM是否写入完成:

这段话什么意思呢:EEPROM做为我们的非易失存储器(掉电不会丢失数据),相当于我们电脑中的硬盘,它的读写速度是非常慢的,所以STM32把数据发送过去之后,必须等待EEPROM去把数据写入自己内部的存储器才能写入下一波数据(可以是单字节写入也可以是页写入),如果不等待EEPROM把上一次的数据写完又去写入EEPROM是不会搭理你的,也就是说EEPROM处于忙碌状态。
检测EEPROM数据是否写入完成:
用STM32主机不断向EEPROM发送起始信号,然后发送EEPROM的设备的地址等待EEPROM的应答信号,如果不应答,重复在来一遍,直到EEPROM应答则代表EEPROM上一次的数据写入完成,然后才可以传输下一次的数据!!!
3.STM32随机读取EEPROM内部任何地址的数据


4.STM32随机顺序读取EEPROM内部任何地址的数据

EEPROM一共有256个字节对应的地址为(0~255)
当读取到最后一个字节,也就是255地址,第256个字节,在读取又会从头(第一个字节数据)开始读取。
六.硬件I2C读写EEPROM实验
实验目的
STM32作为主机向从机EEPROM存储器写入256个字节的数据
STM32作为主机向从机EEPROM存储器读取写入的256个字节的数据
读写成功亮绿灯,读写失败亮红灯
实验原理
- 硬件设计
原理图

实物图

编程要点
(1) 配置通讯使用的目标引脚为开漏模式;
(2) 编写模拟 I2C 时序的控制函数;
(3) 编写基本 I2C 按字节收发的函数;
(4) 编写读写 EEPROM 存储内容的函数;
(5) 编写测试程序,对读写数据进行校验。
两个引脚PB6,PB7都要配置成复用的开漏输出
这里有一个注意的点,你配置成输出模式,并不会影响引脚的输入功能
详情请看——>GPIO端口的八种工作模式

源码
i2c_ee.h
前面理论已经讲得已经很详细了,直接上代码叭!!
#ifndef __IIC_EE_H
#define __IIC_EE_H
#include "stm32f10x.h"
#include <stdio.h>
//IIC1
#define EEPROM_I2C I2C1
#define EEPROM_I2C_CLK RCC_APB1Periph_I2C1
#define EEPROM_I2C_APBxClkCmd RCC_APB1PeriphClockCmd
#define EEPROM_I2C_BAUDRATE 400000
// IIC1 GPIO 引脚宏定义
#define EEPROM_I2C_SCL_GPIO_CLK (RCC_APB2Periph_GPIOB)
#define EEPROM_I2C_SDA_GPIO_CLK (RCC_APB2Periph_GPIOB)
#define EEPROM_I2C_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd
#define EEPROM_I2C_SCL_GPIO_PORT GPIOB
#define EEPROM_I2C_SCL_GPIO_PIN GPIO_Pin_6
#define EEPROM_I2C_SDA_GPIO_PORT GPIOB
#define EEPROM_I2C_SDA_GPIO_PIN GPIO_Pin_7
//STM32自身地址1 与从机设备地址不相同即可(7位地址)
#define STM32_I2C_OWN_ADDR 0x6f
//EEPROM设备地址
#define EEPROM_I2C_Address 0XA0
#define I2C_PageSize 8
//等待次数
#define I2CT_FLAG_TIMEOUT ((uint32_t)0x1000)
#define I2CT_LONG_TIMEOUT ((uint32_t)(10 * I2CT_FLAG_TIMEOUT))
/*信息输出*/
#define EEPROM_DEBUG_ON 0
#define EEPROM_INFO(fmt,arg...) printf("<<-EEPROM-INFO->> "fmt"\n",##arg)
#define EEPROM_ERROR(fmt,arg...) printf("<<-EEPROM-ERROR->> "fmt"\n",##arg)
#define EEPROM_DEBUG(fmt,arg...) do{\
if(EEPROM_DEBUG_ON)\
printf("<<-EEPROM-DEBUG->> [%d]"fmt"\n",__LINE__, ##arg);\
}while(0)
void I2C_EE_Config(void);
void EEPROM_Byte_Write(uint8_t addr,uint8_t data);
uint32_t EEPROM_WaitForWriteEnd(void);
uint32_t EEPROM_Page_Write(uint8_t addr,uint8_t *data,uint16_t Num_ByteToWrite);
uint32_t EEPROM_Read(uint8_t *data,uint8_t addr,uint16_t Num_ByteToRead);
void I2C_EE_BufferWrite(uint8_t* pBuffer,uint8_t WriteAddr, uint16_t NumByteToWrite);
#endif /* __IIC_EE_H */
i2c_ee.c
#include "i2c_ee.h"
//设置等待时间
static __IO uint32_t I2CTimeout = I2CT_LONG_TIMEOUT;
//等待超时,打印错误信息
static uint32_t I2C_TIMEOUT_UserCallback(uint8_t errorCode);
void I2C_EE_Config(void)
{
GPIO_InitTypeDef GPIO_InitStuctrue;
I2C_InitTypeDef I2C_InitStuctrue;
//开启GPIO外设时钟
EEPROM_I2C_GPIO_APBxClkCmd(EEPROM_I2C_SCL_GPIO_CLK|EEPROM_I2C_SDA_GPIO_CLK,ENABLE);
//开启IIC外设时钟
EEPROM_I2C_APBxClkCmd(EEPROM_I2C_CLK,ENABLE);
//SCL引脚-复用开漏输出
GPIO_InitStuctrue.GPIO_Mode=GPIO_Mode_AF_OD;
GPIO_InitStuctrue.GPIO_Pin=EEPROM_I2C_SCL_GPIO_PIN;
GPIO_InitStuctrue.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(EEPROM_I2C_SCL_GPIO_PORT,&GPIO_InitStuctrue);
//SDA引脚-复用开漏输出
GPIO_InitStuctrue.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStuctrue.GPIO_Pin = EEPROM_I2C_SDA_GPIO_PIN;
GPIO_InitStuctrue.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(EEPROM_I2C_SDA_GPIO_PORT,&GPIO_InitStuctrue);
//IIC结构体成员配置
I2C_InitStuctrue.I2C_Ack=I2C_Ack_Enable;
I2C_InitStuctrue.I2C_AcknowledgedAddress=I2C_AcknowledgedAddress_7bit;
I2C_InitStuctrue.I2C_ClockSpeed=EEPROM_I2C_BAUDRATE;
I2C_InitStuctrue.I2C_DutyCycle=I2C_DutyCycle_2;
I2C_InitStuctrue.I2C_Mode=I2C_Mode_I2C;
I2C_InitStuctrue.I2C_OwnAddress1=STM32_I2C_OWN_ADDR;
I2C_Init(EEPROM_I2C,&I2C_InitStuctrue);
I2C_Cmd(EEPROM_I2C,ENABLE);
}
//向EEPROM写入一个字节
void EEPROM_Byte_Write(uint8_t addr,uint8_t data)
{
//发送起始信号
I2C_GenerateSTART(EEPROM_I2C,ENABLE);
//检测EV5事件
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_MODE_SELECT)==ERROR);
//发送设备写地址
I2C_Send7bitAddress(EEPROM_I2C,EEPROM_I2C_Address,I2C_Direction_Transmitter);
//检测EV6事件
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)==ERROR);
//发送要操作设备内部的地址
I2C_SendData(EEPROM_I2C,addr);
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_BYTE_TRANSMITTING )==ERROR);
I2C_SendData(EEPROM_I2C,data);
//检测EV8_2事件
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_BYTE_TRANSMITTED )==ERROR);
//发送停止信号
I2C_GenerateSTOP(EEPROM_I2C,ENABLE);
}
//向EEPROM写入多个字节
uint32_t EEPROM_Page_Write(uint8_t addr,uint8_t *data,uint16_t Num_ByteToWrite)
{
I2CTimeout = I2CT_LONG_TIMEOUT;
//判断IIC总线是否忙碌
while(I2C_GetFlagStatus(EEPROM_I2C, I2C_FLAG_BUSY))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(1);
}
//重新赋值
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送起始信号
I2C_GenerateSTART(EEPROM_I2C,ENABLE);
//检测EV5事件
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_MODE_SELECT)==ERROR)
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(2);
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送设备写地址
I2C_Send7bitAddress(EEPROM_I2C,EEPROM_I2C_Address,I2C_Direction_Transmitter);
//检测EV6事件
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)==ERROR)
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(3);
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送要操作设备内部的地址
I2C_SendData(EEPROM_I2C,addr);
//检测EV8事件
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_BYTE_TRANSMITTING )==ERROR)
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(4);
}
while(Num_ByteToWrite)
{
I2C_SendData(EEPROM_I2C,*data);
I2CTimeout = I2CT_FLAG_TIMEOUT;
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_BYTE_TRANSMITTING )==ERROR)
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(5);
}
Num_ByteToWrite--;
data++;
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//检测EV8_2事件
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_BYTE_TRANSMITTED )==ERROR)
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(6);
}
//发送停止信号
I2C_GenerateSTOP(EEPROM_I2C,ENABLE);
return 1;
}
//向EEPROM读取多个字节
uint32_t EEPROM_Read(uint8_t *data,uint8_t addr,uint16_t Num_ByteToRead)
{
I2CTimeout = I2CT_LONG_TIMEOUT;
//判断IIC总线是否忙碌
while(I2C_GetFlagStatus(EEPROM_I2C, I2C_FLAG_BUSY))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(1);
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送起始信号
I2C_GenerateSTART(EEPROM_I2C,ENABLE);
//检测EV5事件
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_MODE_SELECT )==ERROR)
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(7);
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送设备写地址
I2C_Send7bitAddress(EEPROM_I2C,EEPROM_I2C_Address,I2C_Direction_Transmitter);
//检测EV6事件等待从机应答
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED )==ERROR)
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(8);
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送要操作设备内部存储器的地址
I2C_SendData(EEPROM_I2C,addr);
//检测EV8事件
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_BYTE_TRANSMITTING )==ERROR)
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(9);
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送起始信号
I2C_GenerateSTART(EEPROM_I2C,ENABLE);
//检测EV5事件
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_MODE_SELECT )==ERROR)
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(10);
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送设备读地址
I2C_Send7bitAddress(EEPROM_I2C,EEPROM_I2C_Address,I2C_Direction_Receiver);
//检测EV6事件
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED )==ERROR)
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(10);
}
while(Num_ByteToRead--)
{
//是否是最后一个字节,若是则发送非应答信号
if( Num_ByteToRead==0)
{
//发送非应答信号
I2C_AcknowledgeConfig(EEPROM_I2C,DISABLE);
//发送停止信号
I2C_GenerateSTOP(EEPROM_I2C,ENABLE);
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//检测EV7事件
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_BYTE_RECEIVED )==ERROR)
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(10);
}
*data=I2C_ReceiveData(EEPROM_I2C);
data++;
}
//重新开启应答信号
I2C_AcknowledgeConfig(EEPROM_I2C,ENABLE);
return 1;
}
void I2C_EE_BufferWrite(uint8_t* pBuffer,uint8_t WriteAddr, uint16_t NumByteToWrite)
{
u8 NumOfPage = 0, NumOfSingle = 0, Addr = 0, count = 0;
//I2C_PageSize=8
Addr = WriteAddr % I2C_PageSize;
count = I2C_PageSize - Addr;
NumOfPage = NumByteToWrite / I2C_PageSize;
NumOfSingle = NumByteToWrite % I2C_PageSize;
/* 写入数据的地址对齐,对齐数为8 */
if(Addr == 0)
{
/* 如果写入的数据个数小于8 */
if(NumOfPage == 0)
{
EEPROM_Page_Write(WriteAddr, pBuffer, NumOfSingle);
EEPROM_WaitForWriteEnd();
}
/* 如果写入的数据个数大于8 */
else
{
//按页写入
while(NumOfPage--)
{
EEPROM_Page_Write(WriteAddr, pBuffer, I2C_PageSize);
EEPROM_WaitForWriteEnd();
WriteAddr += I2C_PageSize;
pBuffer += I2C_PageSize;
}
//不足一页(8个)单独写入
if(NumOfSingle!=0)
{
EEPROM_Page_Write(WriteAddr, pBuffer, NumOfSingle);
EEPROM_WaitForWriteEnd();
}
}
}
/*写的数据的地址不对齐*/
else
{
NumByteToWrite -= count;
NumOfPage = NumByteToWrite / I2C_PageSize;
NumOfSingle = NumByteToWrite % I2C_PageSize;
if(count != 0)
{
EEPROM_Page_Write(WriteAddr, pBuffer, count);
EEPROM_WaitForWriteEnd();
WriteAddr += count;
pBuffer += count;
}
while(NumOfPage--)
{
EEPROM_Page_Write(WriteAddr, pBuffer, I2C_PageSize);
EEPROM_WaitForWriteEnd();
WriteAddr += I2C_PageSize;
pBuffer += I2C_PageSize;
}
if(NumOfSingle != 0)
{
EEPROM_Page_Write(WriteAddr, pBuffer, NumOfSingle);
EEPROM_WaitForWriteEnd();
}
}
}
uint32_t EEPROM_WaitForWriteEnd(void)
{
I2CTimeout = I2CT_FLAG_TIMEOUT;
do
{
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送起始信号
I2C_GenerateSTART(EEPROM_I2C,ENABLE);
//检测EV5事件
while( I2C_GetFlagStatus(EEPROM_I2C,I2C_FLAG_SB )==RESET)
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(10);
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送设备写地址
I2C_Send7bitAddress(EEPROM_I2C,EEPROM_I2C_Address,I2C_Direction_Transmitter);
}while( (I2C_GetFlagStatus(EEPROM_I2C,I2C_FLAG_ADDR )==RESET) && (I2CTimeout--) );
//发送停止信号
I2C_GenerateSTOP(EEPROM_I2C,ENABLE);
return 1;
}
static uint32_t I2C_TIMEOUT_UserCallback(uint8_t errorCode)
{
/* Block communication and all processes */
EEPROM_ERROR("I2C 等待超时!errorCode = %d",errorCode);
return 0;
}
main.c
#include "stm32f10x.h"
#include "led.h"
#include "./i2c/i2c_ee.h"
#include <string.h>
#include "usart.h"
#define SOFT_DELAY Delay(0x0FFFFF);
void Delay(__IO u32 nCount);
//声明I2C测试函数
uint8_t I2C_EE_Test(void);
int main(void)
{
//初始化IIC
I2C_EE_Config();
//初始化USART
Usart_Config();
//初始化LED
LED_GPIO_Config();
printf("\r\nIIC读写EEPROM测试实验\r\n");
//读写成功亮绿灯,失败亮红灯
if( I2C_EE_Test()==1 )
{
LED_G(NO);
}
else
{
LED_R(NO);
}
while(1)
{
;
}
}
uint8_t I2C_EE_Test(void)
{
uint8_t ReadData[256]={0};
uint8_t WriteDdta[256]={0};
uint16_t i;
//初始化写入数组
for(i=0;i<256;i++)
{
WriteDdta[i]=i;
}
//向EEPROM从地址为0开始写入256个字节的数据
I2C_EE_BufferWrite(WriteDdta,0,256);
//等待EEPROM写入数据完成
EEPROM_WaitForWriteEnd();
//向EEPROM从地址为0开始读出256个字节的数据
EEPROM_Read(ReadData,0,256);
for (i=0; i<256; i++)
{
if(ReadData[i] != WriteDdta[i])
{
EEPROM_ERROR("0x%02X ", ReadData[i]);
EEPROM_ERROR("错误:I2C EEPROM写入与读出的数据不一致\n\r");
return 0;
}
printf("0x%02X ", ReadData[i]);
if(i%16 == 15)
printf("\n\r");
}
EEPROM_INFO("I2C(AT24C02)读写测试成功\n\r");
return 1;
}
void Delay(__IO uint32_t nCount) //简单的延时函数
{
for(; nCount != 0; nCount--);
}
重点讲一下,如何解决以下页写入问题,实现连续写入
- 进行页写入时,写入的存储器地址要对齐到8,也就是说只能写入地址为 0 8 16 32… 能整除8
- 页写如只能一次写入8个字节
现在来解释代码中下图函数如何解决问题

如果地址对齐:


如果地址不对齐:

实验效果

七.软件模式I2C协议
实验目的
STM32作为主机向从机EEPROM存储器写入256个字节的数据
STM32作为主机向从机EEPROM存储器读取写入的256个字节的数据
读写成功亮绿灯,读写失败亮红灯
实验原理

软件模式I2C由我们CPU来控制引脚产生I2C时序,所以我们随便选引脚都可以,不过你选择的引脚肯定要连接到通信的EEPROM的SCL,SDA引脚上。这里是用了PC12,PC11充当主机STM32SCL,SDA引脚。
- 主机产生起始信号

- 主机产生停止信号

- 主机产生应答信号或非应答信号


- 等待从机EEPROM应答

- 主机发送一个字节给从机

- 主机向EEPROM接收一个字节

value应该初始化为0,我忘了sorry
源码
i2c_gpio.h
#ifndef _I2C_GPIO_H
#define _I2C_GPIO_H
#include "stm32f10x.h"
#define EEPROM_I2C_WR 0 /* 写控制bit */
#define EEPROM_I2C_RD 1 /* 读控制bit */
#define EEPROM_GPIO_PORT_I2C GPIOB
#define EEPROM_RCC_I2C_PORT RCC_APB2Periph_GPIOB
#define EEPROM_I2C_SCL_PIN GPIO_Pin_6
#define EEPROM_I2C_SDA_PIN GPIO_Pin_7
/*当 STM32 的 GPIO 配置成开漏输出模式时,它仍然可以通过读取
GPIO 的输入数据寄存器获取外部对引脚的输入电平,也就是说它同时具有浮空输入模式的
功能*/
#define EEPROM_I2C_SCL_1() EEPROM_GPIO_PORT_I2C->BSRR |= EEPROM_I2C_SCL_PIN /* SCL = 1 */
#define EEPROM_I2C_SCL_0() EEPROM_GPIO_PORT_I2C->BRR |= EEPROM_I2C_SCL_PIN /* SCL = 0 */
#define EEPROM_I2C_SDA_1() EEPROM_GPIO_PORT_I2C->BSRR |= EEPROM_I2C_SDA_PIN /* SDA = 1 */
#define EEPROM_I2C_SDA_0() EEPROM_GPIO_PORT_I2C->BRR |= EEPROM_I2C_SDA_PIN /* SDA = 0 */
#define EEPROM_I2C_SDA_READ() ((EEPROM_GPIO_PORT_I2C->IDR & EEPROM_I2C_SDA_PIN)!=0 ) /* 读SDA口线状态 */
void i2c_Start(void);
void i2c_Stop(void);
void i2c_Ack(void);
void i2c_NAcK(void);
uint8_t i2c_WaitAck(void);
void i2c_SendByte(uint8_t data);
uint8_t i2c_ReadByte(void);
uint8_t i2c_CheckDevice(uint8_t Address);
#endif /* _I2C_GPIO_H */
i2c_gpio.c
#include "i2c_gpio.h"
#include "stm32f10x.h"
void I2c_gpio_config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(EEPROM_RCC_I2C_PORT, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStructure.GPIO_Pin = EEPROM_I2C_SCL_PIN | EEPROM_I2C_SDA_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(EEPROM_GPIO_PORT_I2C, &GPIO_InitStructure);
/* 给一个停止信号, 复位I2C总线上的所有设备到待机模式 */
i2c_Stop();
}
static void i2c_Delay(void)
{
uint8_t i;
for(i=0;i<10;i++)
{
}
}
void i2c_Start(void)
{
EEPROM_I2C_SCL_1();
EEPROM_I2C_SDA_1();
i2c_Delay();
EEPROM_I2C_SDA_0();
i2c_Delay();
EEPROM_I2C_SCL_0();
i2c_Delay();
}
void i2c_Stop(void)
{
EEPROM_I2C_SDA_0();
EEPROM_I2C_SCL_1();
i2c_Delay();
EEPROM_I2C_SDA_1();
i2c_Delay();
}
void i2c_Ack(void)
{
EEPROM_I2C_SCL_0();
i2c_Delay();
EEPROM_I2C_SDA_0();
i2c_Delay();
EEPROM_I2C_SCL_1();
i2c_Delay();
EEPROM_I2C_SCL_0();
i2c_Delay();
EEPROM_I2C_SDA_1();
i2c_Delay();
}
void i2c_NAcK(void)
{
EEPROM_I2C_SDA_1();
i2c_Delay();
EEPROM_I2C_SCL_1();
i2c_Delay();
EEPROM_I2C_SCL_0();
i2c_Delay();
}
uint8_t i2c_WaitAck(void)
{
uint8_t ret;
EEPROM_I2C_SDA_1();
EEPROM_I2C_SCL_1();
i2c_Delay();
if( EEPROM_I2C_SDA_READ() )
{
ret=1;
}
else
{
ret=0;
}
EEPROM_I2C_SCL_0();
i2c_Delay();
return ret;
}
void i2c_SendByte(uint8_t data)
{
uint8_t i;
for(i=0;i<8;i++)
{
if( data&0x80 )
{
EEPROM_I2C_SDA_1();
}
else
{
EEPROM_I2C_SDA_0();
}
i2c_Delay();
EEPROM_I2C_SCL_1();
i2c_Delay();
EEPROM_I2C_SCL_0();
i2c_Delay();
if( i==7 )
{
EEPROM_I2C_SDA_1();
i2c_Delay();
}
data=data<<1;
}
}
uint8_t i2c_ReadByte(void)
{
uint8_t value=0;
uint8_t i;
for(i=0;i<8;i++)
{
value=value<<1;
EEPROM_I2C_SCL_1();
i2c_Delay();
if( EEPROM_I2C_SDA_READ() )
{
value++;
}
EEPROM_I2C_SCL_0();
i2c_Delay();
}
return value;
}
uint8_t i2c_CheckDevice(uint8_t Address)
{
uint8_t ucACK;
I2c_gpio_config();
i2c_Start();
i2c_SendByte(Address|EEPROM_I2C_WR);
ucACK=i2c_WaitAck();
i2c_Stop();
return ucACK;
}
i2c_ee.h
#ifndef _I2C_EE_H
#define _I2C_EE_H
#include "stm32f10x.h"
#define EEPROM_DEV_ADDR 0xA0 /* 24xx02的设备地址 */
#define EEPROM_PAGE_SIZE 8 /* 24xx02的页面大小 */
#define EEPROM_SIZE 256 /* 24xx02总容量 */
uint8_t ee_Checkok(void);
uint8_t ee_ReadByte( uint8_t *pReaddata,uint16_t Address,uint16_t num );
uint8_t ee_WriteByte( uint8_t *Writepdata,uint16_t Address,uint16_t num );
uint8_t ee_WaitStandby(void);
uint8_t ee_WriteBytes(uint8_t *_pWriteBuf, uint16_t _usAddress, uint16_t _usSize);
uint8_t ee_ReadBytes(uint8_t *_pReadBuf, uint16_t _usAddress, uint16_t _usSize);
uint8_t ee_Test(void) ;
#endif /* _I2C_EE_H*/
i2c_ee.c
#include "i2c_ee.h"
#include "i2c_gpio.h"
//检测EEPORM是否忙碌
uint8_t ee_Checkok(void)
{
if(i2c_CheckDevice(EEPROM_DEV_ADDR)==0)
{
return 1;
}
else
{
i2c_Stop();
return 0;
}
}
//检测EEPROM写入数完成
uint8_t ee_WaitStandby(void)
{
uint32_t wait_count = 0;
while(i2c_CheckDevice(EEPROM_DEV_ADDR))
{
//若检测超过次数,退出循环
if(wait_count++>0xFFFF)
{
//等待超时
return 1;
}
}
//等待完成
return 0;
}
//向EEPROM写入多个字节
uint8_t ee_WriteBytes(uint8_t *_pWriteBuf, uint16_t _usAddress, uint16_t _usSize)
{
uint16_t i,m;
uint16_t addr;
addr=_usAddress;
for(i=0;i<_usSize;i++)
{
//当第一次或者地址对齐到8就要重新发起起始信号和EEPROM地址
//为了解决8地址对齐问题
if(i==0 || (addr % EEPROM_PAGE_SIZE)==0 )
{
//循环发送起始信号和EEPROM地址的原因是为了等待上一次写入的一页数据\
写入完成
for(m=0;m<1000;m++)
{
//发送起始地址
i2c_Start();
//发送设备写地址
i2c_SendByte(EEPROM_DEV_ADDR|EEPROM_I2C_WR);
//等待从机应答
if( i2c_WaitAck()==0 )
{
break;
}
}
//若等待的1000次从机还未应答,等待超时
if( m==1000 )
{
goto cmd_fail;
}
//EEPROM应答后发送EEPROM的内部存储器地址
i2c_SendByte((uint8_t)addr);
//等待从机应答
if( i2c_WaitAck()!=0 )
{
goto cmd_fail;
}
}
//发送数据
i2c_SendByte(_pWriteBuf[i]);
//等待应答
if( i2c_WaitAck()!=0 )
{
goto cmd_fail;
}
//写入地址加1
addr++;
}
i2c_Stop();
return 1;
cmd_fail:
i2c_Stop();
return 0;
}
uint8_t ee_ReadBytes(uint8_t *_pReadBuf, uint16_t _usAddress, uint16_t _usSize)
{
uint16_t i;
i2c_Start();
i2c_SendByte(EEPROM_DEV_ADDR|EEPROM_I2C_WR);
if( i2c_WaitAck()!=0 )
{
goto cmd_fail;
}
i2c_SendByte((uint8_t)_usAddress);
if( i2c_WaitAck()!=0 )
{
goto cmd_fail;
}
i2c_Start();
i2c_SendByte(EEPROM_DEV_ADDR|EEPROM_I2C_RD);
if( i2c_WaitAck()!=0 )
{
goto cmd_fail;
}
for(i=0;i<_usSize;i++)
{
_pReadBuf[i]=i2c_ReadByte();
/* 每读完1个字节后,需要发送Ack, 最后一个字节不需要Ack,发Nack */
if (i != _usSize - 1)
{
// i2c_NAcK(); /* 最后1个字节读完后,CPU产生NACK信号(驱动SDA = 1) */
i2c_Ack(); /* 中间字节读完后,CPU产生ACK信号(驱动SDA = 0) */
}
else
{
i2c_NAcK(); /* 最后1个字节读完后,CPU产生NACK信号(驱动SDA = 1) */
}
}
i2c_Stop();
return 1;
cmd_fail:
i2c_Stop();
return 0;
}
uint8_t ee_Test(void)
{
uint16_t i;
uint8_t write_buf[EEPROM_SIZE];
uint8_t read_buf[EEPROM_SIZE];
/*-----------------------------------------------------------------------------------*/
if (i2c_CheckDevice(EEPROM_DEV_ADDR) == 1)
{
/* 没有检测到EEPROM */
printf("没有检测到串行EEPROM!\r\n");
return 0;
}
/*------------------------------------------------------------------------------------*/
/* 填充测试缓冲区 */
for (i = 0; i < EEPROM_SIZE; i++)
{
write_buf[i] = i;
}
/*------------------------------------------------------------------------------------*/
if (ee_WriteBytes(write_buf, 0, EEPROM_SIZE) == 0)
{
printf("写EEPROM出错!\r\n");
return 0;
}
else
{
printf("写EEPROM成功!\r\n");
}
/*-----------------------------------------------------------------------------------*/
if (ee_ReadBytes(read_buf, 0, EEPROM_SIZE) == 0)
{
printf("EEPROM出错!\r\n");
return 0;
}
else
{
printf("EEPROM成功,数据如下:\r\n");
}
/*-----------------------------------------------------------------------------------*/
for (i = 0; i < EEPROM_SIZE; i++)
{
if(read_buf[i] != write_buf[i])
{
printf("0x%02X ", read_buf[i]);
printf("错误:EEPROM读出与写入的数据不一致");
return 0;
}
printf(" %02X", read_buf[i]);
if ((i & 15) == 15)
{
printf("\r\n");
}
}
printf("EEPROM读写测试成功\r\n");
return 1;
}
main
#include "stm32f10x.h"
#include "led.h"
#include "usart.h"
#include <string.h>
#include "i2c_ee.h"
#include "i2c_gpio.h"
#define SOFT_DELAY Delay(0x0FFFFF);
void Delay(__IO u32 nCount);
int main(void)
{
/* LED 端口初始化 */
LED_GPIO_Config();
/*初始化USART 配置模式为 115200 8-N-1,中断接收*/
USART_Config();
printf("EEPROM 软件模拟i2c测试例程 \r\n");
if(ee_Test() == 1)
{
LED_G(NO);
}
else
{
LED_R(NO);
}
while(1)
{
}
}
void Delay(__IO uint32_t nCount) //简单的延时函数
{
for(; nCount != 0; nCount--);
}
效果与硬件I2C一模一样就不演示了
八.总结
不管是硬件I2C还是软件I2C先不管他们的优缺点,主要我们是要在实现的过程中理解IC2协议这个才是最重要的,反正I2C必须得会因为应用太广泛了,最后如果文章内容有疑问的来评论区一起讨论讨论!!!

华为开发者空间,是为全球开发者打造的专属开发空间,汇聚了华为优质开发资源及工具,致力于让每一位开发者拥有一台云主机,基于华为根生态开发、创新。
更多推荐



 429
429 6
6- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)