PatchMatch算法详解(python代码实现)
一、简介patchmatch算法的核心目的是在两张图片之间快速寻找对应的小区域。在应用上,patchmatch算法可以结合图像重组等技术,来实现诸如图像修复、图片融合、去水印等功能。patch是指以某个像素为中心的3*3或者5*5的范围。其他的资料很多,建议多搜索一些,本篇重点讲代码是怎么实现的。本篇参考代码来自https://github.com/MingtaoGuo/PatchMatch使用p
一、简介
patchmatch算法的核心目的是在两张图片之间快速寻找对应的小区域。在应用上,patchmatch算法可以结合图像重组等技术,来实现诸如图像修复、图片融合、去水印等功能。
patch是指以某个像素为中心的3*3或者5*5的范围。
其他的资料很多,建议多搜索一些,本篇重点讲代码是怎么实现的。
本篇参考代码来自https://github.com/MingtaoGuo/PatchMatch
使用python实现,我的python版本为3.8
初学者分享,有错误的地方请指正!
二、框架及核心
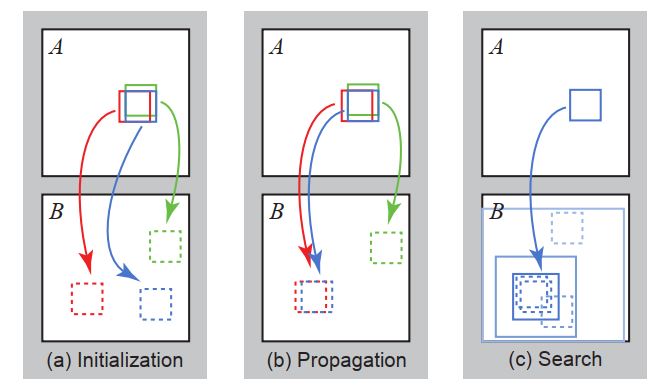
算法核心为下图:初始化、迭代、搜索。

第一步初始化,对于A中的每个像素,在B中找到一个像素,它俩之间的“联系”叫偏移量。或者说对A中的每个像素,赋予它一个偏移量,使其在B中找到一个对应的像素。
第二步,传播,分别计算B中红、蓝、绿三个框(三个patch)与A中蓝色框的偏移量,找到偏移量最小的框。
第三步,在偏移量最小框的周围某个范围内,随机查找几个框,计算偏移量,如果有最小的,就更新最小偏移量的值。
三、代码实现
首先读取原图片A和目标图B,初始化一些参数。
# A为原图
A = np.array(Image.open("img_a.jpg"))
A_prime = np.array(Image.open("img_a.jpg"))
# B为目标图
B = np.array(Image.open("img_b.jpg"))
B_prime = np.array(Image.open("img_b.jpg"))
# 每个patch的大小为5
patch_size = 5
# 搜索范围的半径为6
search_radius = 6
# 迭代次数
itrs = 2然后初始化nnf
nnf = init_nnf(A, B)
假设图片的尺寸为(h, w),原图片某点的像素坐标为(i, j)
nnf的形状为(h, w, 2),代表原图(i, j)坐标的像素为中心的patch块,与目标图(nnf[i, j, 0], nnf[i, j, 1])坐标的像素为中心的patch块对应。后面计算偏移量就是计算这两个坐标代表的patch的偏移量。有点抽象,下面这幅图可以帮助更好理解:

初始化为随机初始化,nnf[i, j, 0], nnf[i, j, 1]两张矩阵的每个元素都是一个随机数。
def init_nnf(A, B):
A_H = A.shape[0]
A_W = A.shape[1]
nnf = np.zeros([A_H, A_W, 2], dtype=np.int32)
# 生成0-B.shape[0]的随机数,形状为[A_H, A_W]
nnf[:, :, 0] = np.random.randint(0, B.shape[0], size=[A_H, A_W])
nnf[:, :, 1] = np.random.randint(0, B.shape[1], size=[A_H, A_W])
return nnf初始化后,开始迭代求nnf
def NNF_Search(A, B, A_prime, B_prime, nnf, patch_size, itrs, search_radius):
A = normalize(A) # 将A进行归一化
B = normalize(B)
A_prime = normalize(A_prime)
B_prime = normalize(B_prime)
A_H = A.shape[0]
A_W = A.shape[1]
B_H = B.shape[0]
B_W = B.shape[1]
SHAPE = [A_H, A_W, B_H, B_W]
# nnd最后的输出就是一张记录对应位置的偏移矩阵(2维)
nnd = init_nnd(A, B, A_prime, B_prime, SHAPE, nnf, patch_size)
# Image.fromarray(np.uint8(nnd)).show()
for itr in range(1, itrs + 1):
# 算法在偶数次对一个Patch查找其原对应点左(x-1,y)上(x,y-1)的Patch
if itr % 2 == 0:
for i in range(A_H - 1, -1, -1):
for j in range(A_W - 1, -1, -1):
nnf, nnd = propagation(A, B, A_prime, B_prime, SHAPE, i, j, nnf, nnd, patch_size, False)
nnf, nnd = random_search(A, B, A_prime, B_prime, SHAPE, i, j, nnf, nnd, search_radius, patch_size)
# 奇数次查找右(x + 1, y)下(x, y + 1)
else:
# 正扫描序
for i in range(A_H):
for j in range(A_W):
nnf, nnd = propagation(A, B, A_prime, B_prime, SHAPE, i, j, nnf, nnd, patch_size, True)
nnf, nnd = random_search(A, B, A_prime, B_prime, SHAPE, i, j, nnf, nnd, search_radius, patch_size)
return nnf在一系列的归一化和参数设置后,对nnd进行初始化,这里的nnd代表每个对应patch之间的偏移量,nnd的形状为(h, w),它是一个一维矩阵。我们进入到init_nnd()函数中。
def init_nnd(A, B, A_prime, B_prime, SHAPE, nnf, patch_size):
A_H = SHAPE[0]
A_W = SHAPE[1]
dist = np.zeros([A_H, A_W])
for i in range(A_H):
for j in range(A_W):
dist[i, j] = cal_distance(A, B, A_prime, B_prime, i, j, nnf[i, j, 0], nnf[i, j, 1], patch_size)
return dist可以看到该函数返回的dist会赋值给nnd,而dist是一个形状为(A_H, A_W)的矩阵,里面的每个元素都是一个距离值,也就是cal_distance()的返回值。下面进入到该函数cal_distance()中。
# 计算距离
# 输入A, B, A_prime, B_prime,当前坐标a_x, a_y,nnf1和nnf2的当前坐标b_x, b_y,patch_size=5
def cal_distance(A, B, A_prime, B_prime, a_x, a_y, b_x, b_y, patch_size):
A_H = A.shape[0]
A_W = A.shape[1]
B_H = B.shape[0]
B_W = B.shape[1]
dx0 = dy0 = patch_size // 2
dx1 = dy1 = patch_size // 2 + 1
dx0 = min(a_x, b_x, dx0)
dx1 = min(A_H - a_x, B_H - b_x, dx1)
dy0 = min(a_y, b_y, dy0)
dy1 = min(A_W - a_y, B_W - b_y, dy1)
patch_A = A[a_x - dx0:a_x + dx1, a_y - dy0:a_y + dy1]
patch_A_prime = A_prime[a_x - dx0:a_x + dx1, a_y - dy0:a_y + dy1]
patch_B = B[b_x - dx0:b_x + dx1, b_y - dy0:b_y + dy1]
patch_B_prime = B_prime[b_x - dx0:b_x + dx1, b_y - dy0:b_y + dy1]
dist = (np.sum((patch_A - patch_B) ** 2 + (patch_A_prime - patch_B_prime) ** 2)) / ((dx0 + dx1) * (dy0 + dy1))
return dist该函数的核心就是计算两个patch块的偏移量,偏移量公式为
,除开求和公式,分子计算出来是一个n
*n的矩阵,而求和公式就是求该矩阵中所有元素的和。
前面的dx0、dx1、dy0、dy1是为了分类讨论。当中心点在不同位置时,patch的范围也不同。

返回到NNF_Search()函数中,进行迭代,在迭代次数中,奇数次使用正扫描序,从左到右,从上到下,而在偶数次时使用逆扫描序。对于每一个像素对应的patch,进行顺序蔓延propagation和随机搜索random_search。下面进入到顺序蔓延函数中。
# 顺序蔓延
def propagation(A, B, A_prime, B_prime, SHAPE, a_x, a_y, nnf, nnd, patch_size, is_odd):
A_H = SHAPE[0]
A_W = SHAPE[1]
B_H = SHAPE[2]
B_W = SHAPE[3]
if is_odd:
# 获取当前a_x, a_y的偏移量
d_best = nnd[a_x, a_y]
# best_b_x,best_b_y为a_x, a_y在B中对应的像素点坐标
best_b_x = nnf[a_x, a_y, 0]
best_b_y = nnf[a_x, a_y, 1]
# 计算偏移量-(当前a_x, a_y与B中对应的a_x, a_y上一个像素)patch的偏移量
if a_y - 1 >= 0:
b_x = nnf[a_x, a_y - 1, 0]
b_y = nnf[a_x, a_y - 1, 1] + 1
if b_y < B_W:
dist = cal_distance(A, B, A_prime, B_prime, a_x, a_y, b_x, b_y, patch_size)
# 如果patch(x,y)与match(x,y)的偏移量d_bets
# 大于patch(x,y)与match(x,y-1)的偏移量dist
# 就说明match(x,y-1)离patch(x,y)更近
# 所以将match(x,y-1)的坐标b_x, b_y复制给best_b_x,best_b_y
if dist < d_best:
best_b_x, best_b_y, d_best = b_x, b_y, dist
# 计算偏移量-(当前a_x, a_y与B中对应的a_x, a_y左一个像素)patch的偏移量
if a_x - 1 >= 0:
b_x = nnf[a_x - 1, a_y, 0] + 1
b_y = nnf[a_x - 1, a_y, 1]
if b_x < B_H:
dist = cal_distance(A, B, A_prime, B_prime, a_x, a_y, b_x, b_y, patch_size)
if dist < d_best:
best_b_x, best_b_y, d_best = b_x, b_y, dist
# 最后将最优match对应的坐标,存入nnf中
# 最后将最小偏移量赋值给nnd对应的坐标下
nnf[a_x, a_y] = [best_b_x, best_b_y]
nnd[a_x, a_y] = d_best
else:
d_best = nnd[a_x, a_y]
best_b_x = nnf[a_x, a_y, 0]
best_b_y = nnf[a_x, a_y, 1]
if a_y + 1 < A_W:
b_x = nnf[a_x, a_y + 1, 0]
b_y = nnf[a_x, a_y + 1, 1] - 1
if b_y >= 0:
dist = cal_distance(A, B, A_prime, B_prime, a_x, a_y, b_x, b_y, patch_size)
if dist < d_best:
best_b_x, best_b_y, d_best = b_x, b_y, dist
if a_x + 1 < A_H:
b_x = nnf[a_x + 1, a_y, 0] - 1
b_y = nnf[a_x + 1, a_y, 1]
if b_x >= 0:
dist = cal_distance(A, B, A_prime, B_prime, a_x, a_y, b_x, b_y, patch_size)
if dist < d_best:
best_b_x, best_b_y, d_best = b_x, b_y, dist
nnf[a_x, a_y] = [best_b_x, best_b_y]
nnd[a_x, a_y] = d_best
return nnf, nnd这里对于每个迭代次数,偶数次时对一个Patch,查找其原对应点左(x-1,y)上(x,y-1)的Patch,而奇数次查找右(x + 1, y)下(x, y + 1)。
该函数的主要作用就是:对于迭代次数为奇数的情况下

下面是随机搜索函数。

可以看到,先取出了数据,再经过操作后存入矩阵。那么具体操作是什么呢?
论文中的解释是为了避免陷入局部极值,再额外再随机生成几个patch位置作为候选patch块,若小于当前patch,则更新。
我们来看代码
# 每次搜索范围/2,当搜索范围>=1时
while search_radius >= 1:
# 判断范围,因为可能在图片边界上
start_x = max(best_b_x - search_radius, 0)
end_x = min(best_b_x + search_radius + 1, B_H)
start_y = max(best_b_y - search_radius, 0)
end_y = min(best_b_y + search_radius + 1, B_W)
# 随机生成范围
b_x = np.random.randint(start_x, end_x)
b_y = np.random.randint(start_y, end_y)
# 计算偏移量
dist = cal_distance(A, B, A_prime, B_prime, a_x, a_y, b_x, b_y, patch_size)
# 优化迭代偏移量
if dist < best_dist:
best_dist = dist
best_b_x = b_x
best_b_y = b_y
search_radius /= 2这里因为搜索范围是6,每次减半,所以只随机生成了4次。
对每个像素进行顺序蔓延(计算了3次偏移量),随机搜索(计算了4次偏移量)。
整个过程结束后,得到了nnf,代表A在B中匹配到的最合适的像素坐标。下面进入到warp()函数中
def warp(f, B):
# 高
A_h = np.size(f, 0)
# 宽
A_w = np.size(f, 1)
# 通道数,B的shape=(h,w,c)
A_c = np.size(B, 2)
temp = np.zeros([A_h, A_w, A_c])
for i in range(A_h):
for j in range(A_w):
# 生成的图片中(i, j)位置的像素值,对应B中的(f[i, j][0], f[i, j][1])位置的像素值,
# 而f为传入的nnf,也就是最合适的像素坐标。
temp[i, j, :] = B[f[i, j][0], f[i, j][1], :]
return temp生成的temp为我们想得到的消除后的图片。
这里有几点疑问:
1、A和A_prime的值一样,有什么作用?
2、计算偏移量时为什么要使用这个公式,而且patch_A对应A,patch_A_prime对应A_prime,而A和A_prime是一样的。
(答案可能在原论文中,我还没看原论文,等看了再来补充)
四、效果展示
原图A

目标图B

生成图片gmt.jpg

下图是使用原始尺寸(2268*4032)生成的结果图,耗时40多分钟,效果非常好。


华为开发者空间,是为全球开发者打造的专属开发空间,汇聚了华为优质开发资源及工具,致力于让每一位开发者拥有一台云主机,基于华为根生态开发、创新。
更多推荐



 11
11 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)