小样本故障诊断 - 注意力机制代码 - BiGRU代码解析实现
开源Measurement论文代码 - 小样本故障诊断 - 注意力机制 - BiGRU代码解析
文章目录
1 参考论文
Fault diagnosis for small samples based on attention mechanism
2 开源代码
https://github.com/liguge/Fault-diagnosis-for-small-samples-based-on-attention-mechanism
3.摘要
针对深度学习在故障诊断中的应用,机械旋转设备部件在复杂的工作环境下容易发生故障,工业大数据存在标记样本有限、工作条件不同、噪声等问题。针对上述问题,提出了一种基于双路径卷积与注意机制(DCA)和双向门控循环单元(DCA- bigru)的小样本故障诊断方法,该方法的性能可以通过最新的正则化训练策略进行有效挖掘。利用BiGRU实现时空特征融合,利用DCA提取融合了注意权的振动信号特征。此外,还将全局平均池化(GAP)应用于降维和故障诊断。实验表明,DCA-BiGRU具有出色的泛化能力和鲁棒性,能够有效地进行各种复杂情况下的诊断。
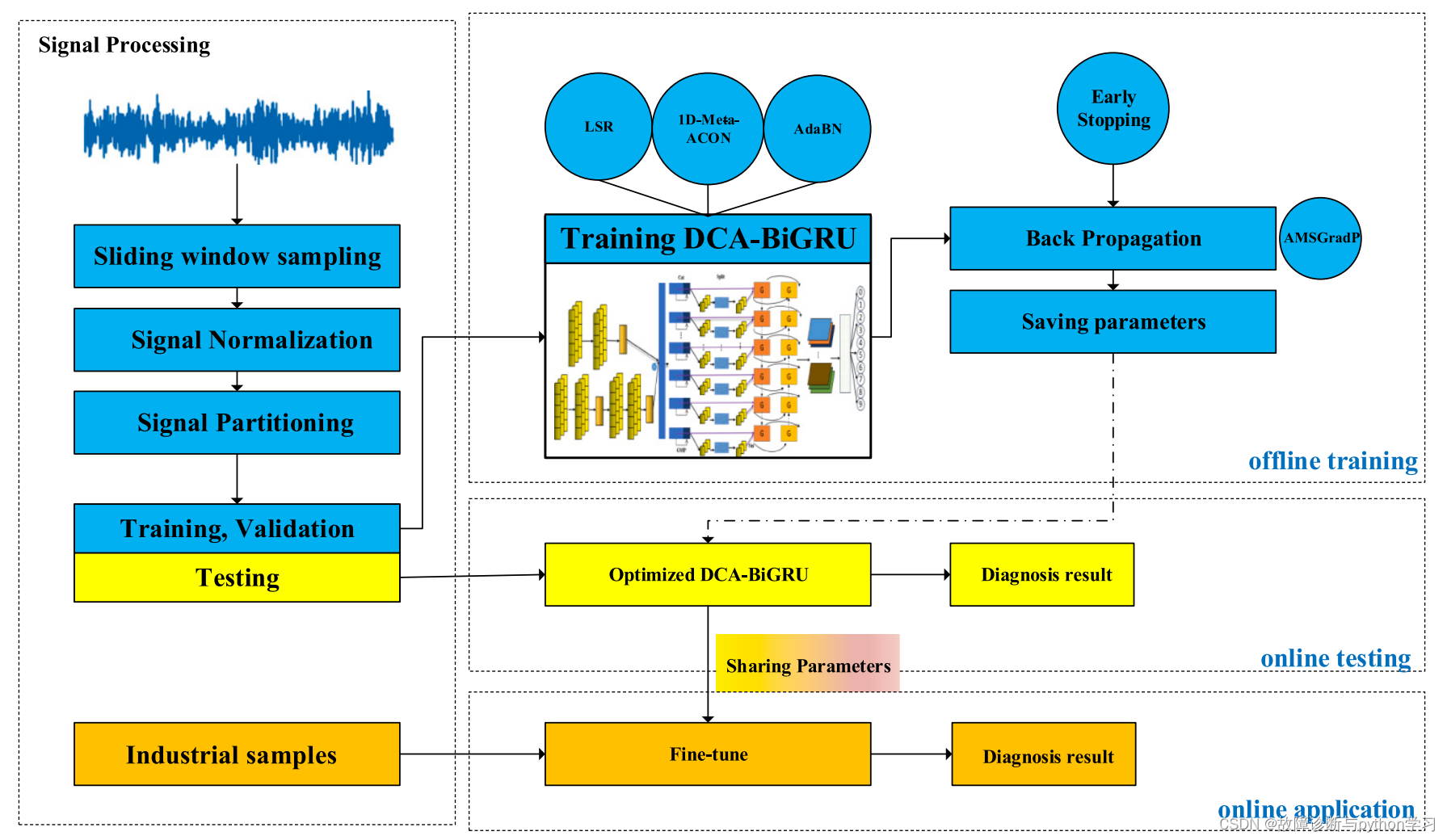
4.故障诊断流程图
5.网络模型
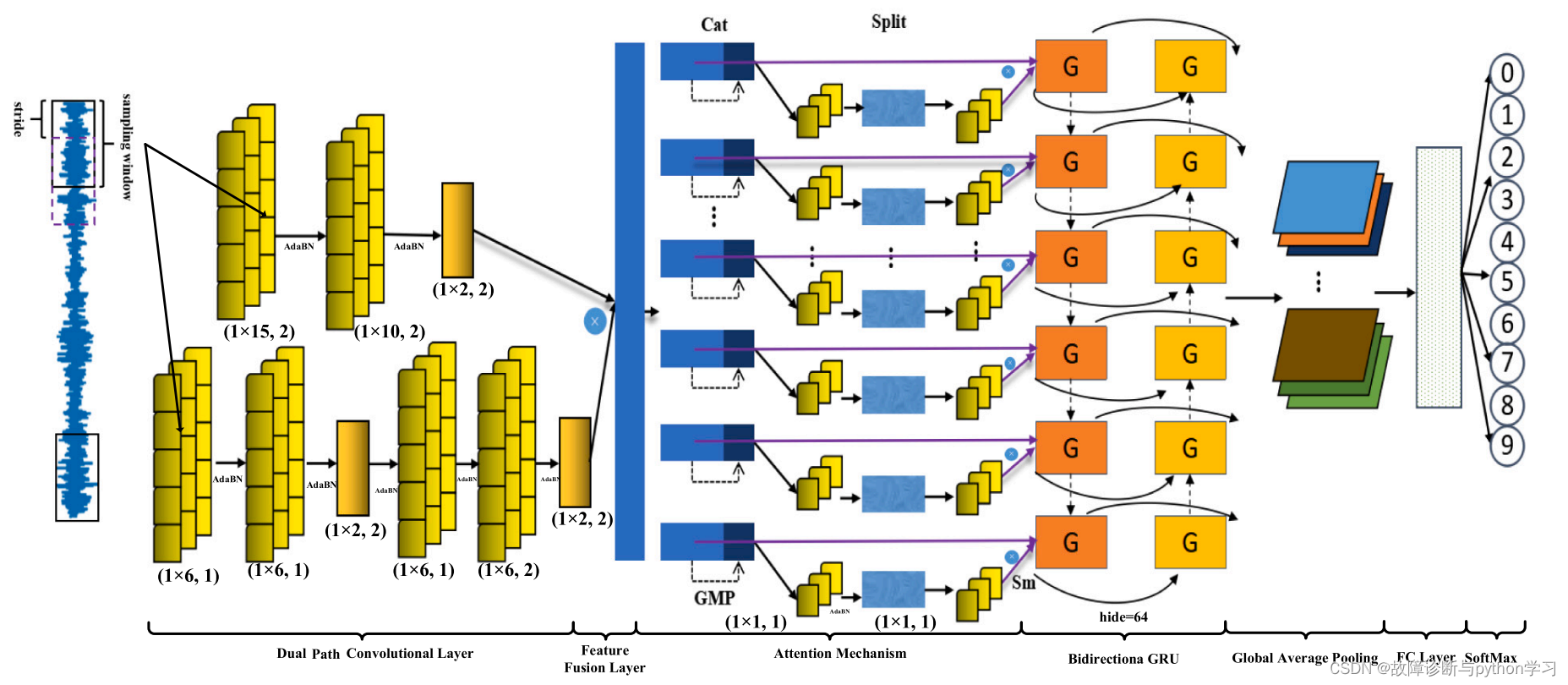
6.网络结构简介
输入1维数据:[batch_size, 1, 1024]–>双通道卷积–>特征融合(cat)–>注意力机制–>Bidirection GRU–>全局平均池化(Global average pool)–>全连接层–>softmax求分类概率
7.网络模型代码
建议使用pytorch,jupyter notebook
7.1MetaAconC
模块代码
import torch
from torch import nn
class AconC(nn.Module):
r""" ACON activation (activate or not).
# AconC: (p1*x-p2*x) * sigmoid(beta*(p1*x-p2*x)) + p2*x, beta is a learnable parameter
# according to "Activate or Not: Learning Customized Activation" <https://arxiv.org/pdf/2009.04759.pdf>.
"""
def __init__(self, width):
super().__init__()
self.p1 = nn.Parameter(torch.randn(1, width, 1))
self.p2 = nn.Parameter(torch.randn(1, width, 1))
self.beta = nn.Parameter(torch.ones(1, width, 1))
def forward(self, x):
return (self.p1 * x - self.p2 * x) * torch.sigmoid(self.beta * (self.p1 * x - self.p2 * x)) + self.p2 * x
class MetaAconC(nn.Module):
r""" ACON activation (activate or not).
# MetaAconC: (p1*x-p2*x) * sigmoid(beta*(p1*x-p2*x)) + p2*x, beta is generated by a small network
# according to "Activate or Not: Learning Customized Activation" <https://arxiv.org/pdf/2009.04759.pdf>.
"""
def __init__(self, width, r=16):
super().__init__()
self.fc1 = nn.Conv1d(width, max(r, width // r), kernel_size=1, stride=1, bias=True)
self.bn1 = nn.BatchNorm1d(max(r, width // r), track_running_stats=True)
self.fc2 = nn.Conv1d(max(r, width // r), width, kernel_size=1, stride=1, bias=True)
self.bn2 = nn.BatchNorm1d(width, track_running_stats=True)
self.p1 = nn.Parameter(torch.randn(1, width, 1))
self.p2 = nn.Parameter(torch.randn(1, width, 1))
def forward(self, x):
beta = torch.sigmoid(self.bn2(self.fc2(self.bn1(self.fc1(x.mean(dim=2, keepdims=True))))))
return (self.p1 * x - self.p2 * x) * torch.sigmoid(beta * (self.p1 * x - self.p2 * x)) + self.p2 * x
代码测试
x = torch.randn(16, 64, 1024) #假设输入x:batch_size=16, channel=64, length=1024
Meta = MetaAconC(64) #创建对象时需输入参数width,其为输入数据的channel
y = Meta(x)
print(y.shape)
>>>output
x.shape: torch.Size([16, 64, 1024])
y.shape: torch.Size([16, 64, 1024])
由结果可见,输入x的shape与输出y的shape是相同的
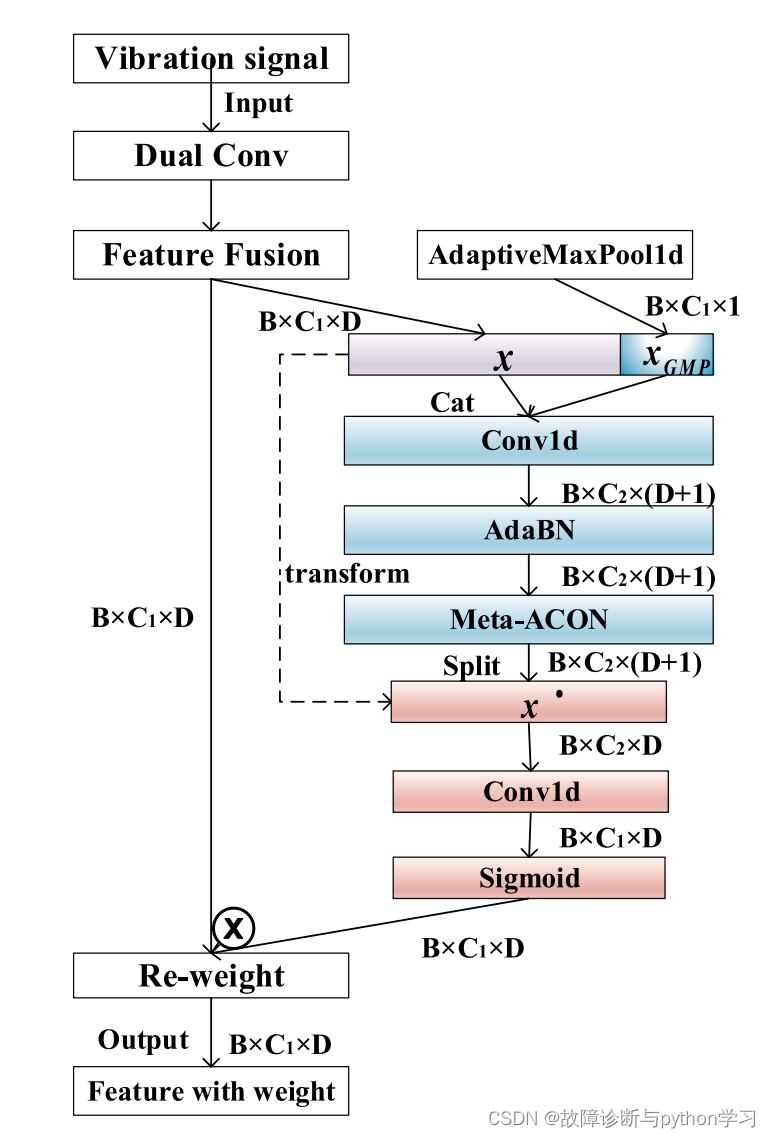
7.2注意力机制
注意力机制结构图
模块代码
class CoordAtt(nn.Module):
def __init__(self, inp, oup, reduction=32):
super(CoordAtt, self).__init__()
# self.pool_w = nn.AdaptiveAvgPool1d(1)
self.pool_w = nn.AdaptiveMaxPool1d(1)
mip = max(6, inp // reduction)
self.conv1 = nn.Conv1d(inp, mip, kernel_size=1, stride=1, padding=0)
self.bn1 = nn.BatchNorm1d(mip, track_running_stats=False)
self.act = MetaAconC(mip)
self.conv_w = nn.Conv1d(mip, oup, kernel_size=1, stride=1, padding=0)
def forward(self, x):
identity = x
n, c, w = x.size()
x_w = self.pool_w(x)
y = torch.cat([identity, x_w], dim=2)
y = self.conv1(y)
y = self.bn1(y)
y = self.act(y)
x_ww, x_c = torch.split(y, [w, 1], dim=2)
a_w = self.conv_w(x_ww)
a_w = a_w.sigmoid()
out = identity * a_w
return out
模块代码测试
x = torch.randn(16, 64, 1024) #假设输入x:batch_size=16, channel=64, length=1024
Att = CoordAtt(inp=64, oup=64) #创建注意力机制对象,输入参数inp和oup参数分别为channel
y = Att(x)
print('y.shape:',y.shape)
>>>output
y.shape: torch.Size([16, 64, 1024])
由结果可见,输入x的shape与输出y的shape是相同的
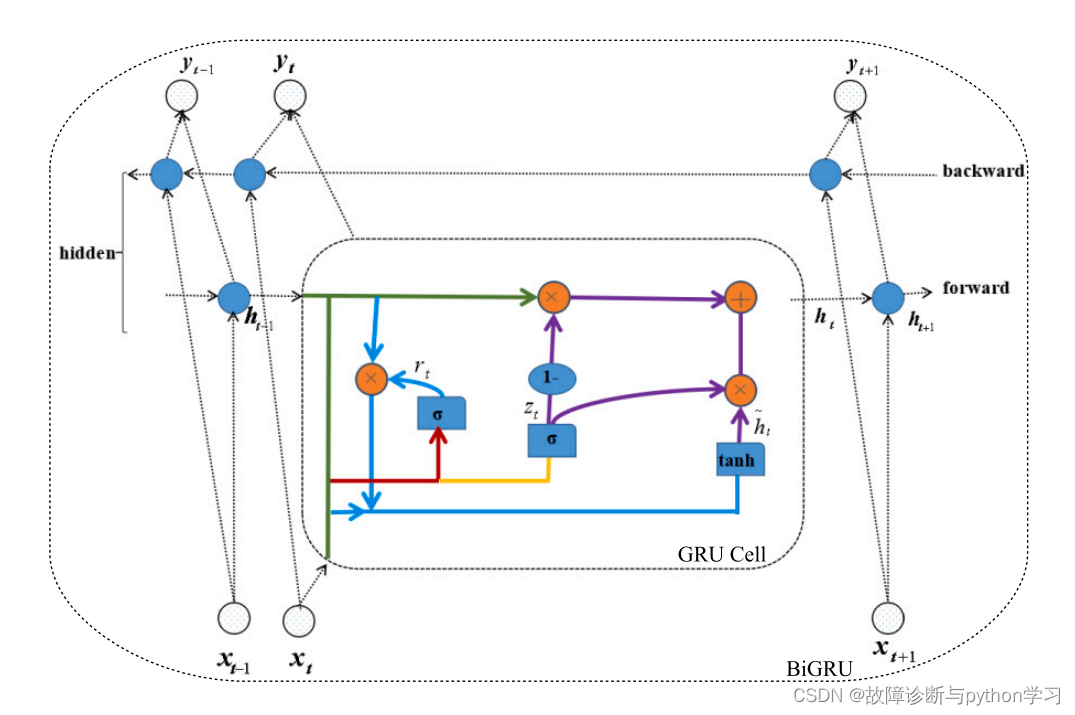
7.3 BiGRU测试
BiGRU结构图
x = torch.randn(16, 64, 128) #假设输入x:batch_size=16, channel=64, length=128
gru = nn.GRU(128, 64, bidirectional=True) #创建GRU对象,128是输入数据x的长度;
#如果bidirectional为False,64是输出数据的长度;如果bidirectional为True,则输出长度为64*2
y = gru(x)
print('y的值:\n',y)
print('y[0]的shape',y[0].shape)
>>>output
y的值:
(tensor([[[-0.7509, -0.0468, 0.2881, ..., -0.6559, 0.5780, 0.3481],
[ 0.4099, 0.1912, -0.2534, ..., -0.2067, -0.1099, -0.3594],
[ 0.0275, 0.0937, -0.4309, ..., -0.6266, 0.5375, 0.2510],
...,
[-0.1896, -0.0118, -0.4895, ..., 0.2022, 0.3144, 0.1806],
[-0.5026, 0.4926, -0.2578, ..., -0.3386, -0.3908, -0.1203],
[-0.0431, -0.1084, 0.4494, ..., 0.4320, -0.2916, 0.4126]]],
grad_fn=<StackBackward0>))
y[0]的shape torch.Size([16, 64, 128])
由结果可以看出,y的输出为一个tuple元组类型,因此使用了y[0]获取里面的tensor数据。
7.4 全局平均池化GAP测试
# 第一步输入x
x = torch.randn(16, 64, 32) #假设输入x:batch_size=16, channel=64, length=128
print('x的值:\n',x)
print('x[0][0]的值:',x[0][0])
print('x[0][0]的平均值:',torch.mean(x[0][0]))
# 第二步进行自适应平均池化
adavp = nn.AdaptiveAvgPool1d(1) #
y = adavp(x)
print('y的值:',y)
print('y的shape:',y.shape)
# 第三步
z = y.squeeze()
print('z的shape:',z.shape)
x的值:
tensor([[[ 7.8979e-01, 1.3657e-01, -9.9066e-01, ..., 9.5261e-01,
9.8295e-02, 6.5511e-01],
[-3.5707e-01, -2.3277e+00, -3.2558e-01, ..., -2.2010e-01,
-1.6210e+00, -1.2564e+00],
[ 1.0400e+00, -1.8403e-01, 1.1634e+00, ..., 5.7404e-02,
-7.0334e-01, -1.5286e-01],
...,
[-1.7541e+00, 5.9410e-01, -1.3539e-01, ..., 8.6600e-02,
1.2851e+00, -2.1541e+00],
[ 1.6649e+00, -3.0008e+00, -6.5557e-01, ..., 3.8984e-01,
-2.4122e+00, 1.3892e+00],
[ 3.2660e-01, 1.4245e+00, 8.2627e-01, ..., -1.1504e+00,
8.5084e-01, -2.3794e-02]]])
x[0][0]的值: tensor([ 0.7898, 0.1366, -0.9907, -0.9970, 1.6666, -1.5021, 0.9952, 0.5044,
0.0828, 1.1746, -1.1589, -1.2519, -1.6039, -0.9943, 0.4700, -0.5370,
0.5983, -0.6333, -1.3765, -0.9212, -0.3939, -0.7217, 0.4318, 0.4706,
0.6322, -0.4217, -1.0003, 1.6015, 0.5162, 0.9526, 0.0983, 0.6551])
x[0][0]的平均值: tensor(-0.0852)
y的值: tensor([[[-0.0852],
[-0.6024],
[-0.0316],
...,
[ 0.0157],
[-0.2135],
[ 0.1926]]])
y的shape: torch.Size([16, 64, 1])
z的shape: torch.Size([16, 64])
由结果可以看出,输入数据x1.shape=[16, 64, 32]全局平均池化是将输入数据的最后一维,及32个数据点取平均值。得到[16, 64]
7.5 整体网络测试
整体网络代码
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.p1_1 = nn.Sequential(nn.Conv1d(in_channels=1, out_channels=50, kernel_size=18, stride=2),
nn.BatchNorm1d(50, track_running_stats=False),
MetaAconC(50))
self.p1_2 = nn.Sequential(nn.Conv1d(50, 30, kernel_size=10, stride=2),
nn.BatchNorm1d(30, track_running_stats=False),
MetaAconC(30))
self.p1_3 = nn.MaxPool1d(2, 2)
self.p2_1 = nn.Sequential(nn.Conv1d(1, 50, kernel_size=6, stride=1),
nn.BatchNorm1d(50, track_running_stats=False),
MetaAconC(50))
self.p2_2 = nn.Sequential(nn.Conv1d(50, 40, kernel_size=6, stride=1),
nn.BatchNorm1d(40, track_running_stats=False),
MetaAconC(40))
self.p2_3 = nn.MaxPool1d(2, 2)
self.p2_4 = nn.Sequential(nn.Conv1d(40, 30, kernel_size=6, stride=1), nn.BatchNorm1d(30, track_running_stats=False),MetaAconC(30))
self.p3_0 = CoordAtt(30, 30)
self.p2_5 = nn.Sequential(nn.Conv1d(30, 30, kernel_size=6, stride=2),
nn.BatchNorm1d(30, track_running_stats=False),
MetaAconC(30))
self.p2_6 = nn.MaxPool1d(2, 2)
self.p3_1 = nn.Sequential(nn.GRU(124, 64, bidirectional=True)) #
# self.p3_2 = nn.Sequential(nn.LSTM(128, 512))
self.p3_3 = nn.Sequential(nn.AdaptiveAvgPool1d(1)) #GAP
self.p4 = nn.Sequential(nn.Linear(30, 10))
def forward(self, x):
p1 = self.p1_3(self.p1_2(self.p1_1(x)))
print('p1.shape:',p1.shape)
p2 = self.p2_6(self.p2_5(self.p2_4(self.p2_3(self.p2_2(self.p2_1(x))))))
print('p2.shape:',p2.shape)
encode = torch.mul(p1, p2)
print('encode.shape:',encode.shape)
# p3 = self.p3_2(self.p3_1(encode))
p3_0 = self.p3_0(encode).permute(1, 0, 2)
print('p3_0.shape:',p3_0.shape)
p3_2, _ = self.p3_1(p3_0)
print('p3_2.shape:',p3_2.shape)
# p3_2, _ = self.p3_2(p3_1)
p3_11 = p3_2.permute(1, 0, 2) #
print('p3_11.shape:',p3_11.shape)
p3_12 = self.p3_3(p3_11).squeeze()
print('p3_12.shape:',p3_12.shape)
# p3_11 = h1.permute(1,0,2)
# p3 = self.p3(encode)
# p3 = p3.squeeze()
# p4 = self.p4(p3_11) # LSTM(seq_len, batch, input_size)
# p4 = self.p4(encode)
p4 = self.p4(p3_12)
print('p4.shape:',p4.shape)
return p4
代码测试
model = Net()
x = torch.randn(16, 1, 1024) #假设输入x:batch_size=16, channel=1, length=1024
y = model(x)
>>>output
p1.shape: torch.Size([16, 30, 124])
p2.shape: torch.Size([16, 30, 124])
encode.shape: torch.Size([16, 30, 124])
p3_0.shape: torch.Size([30, 16, 124])
p3_2.shape: torch.Size([30, 16, 128])
p3_11.shape: torch.Size([16, 30, 128])
p3_12.shape: torch.Size([16, 30])
p4.shape: torch.Size([16, 10])
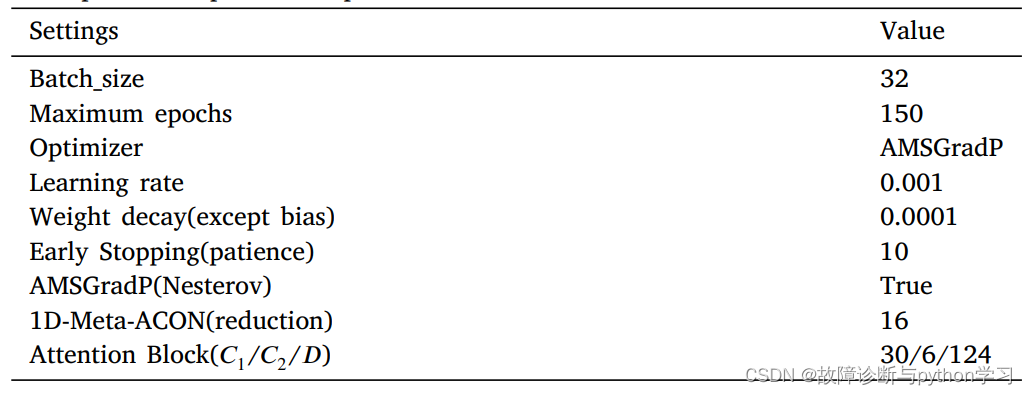
8 实验设置
8.1 模型参数设置
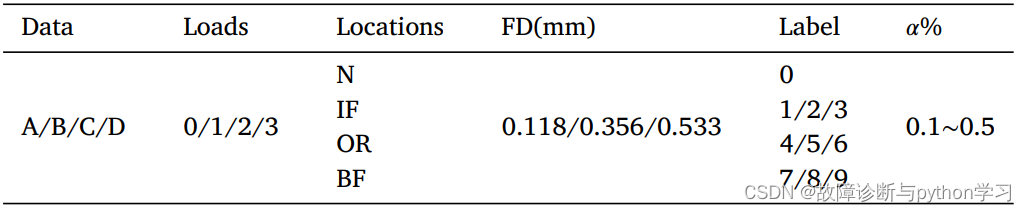
8.2 实验数据设置
9 实验验证
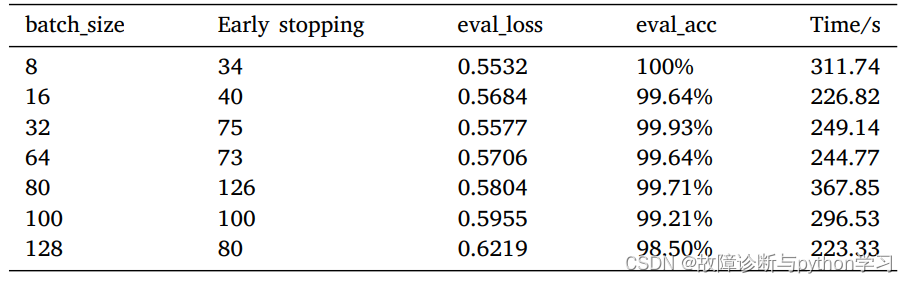
案例1:CWRU
不同batch_size下的结果
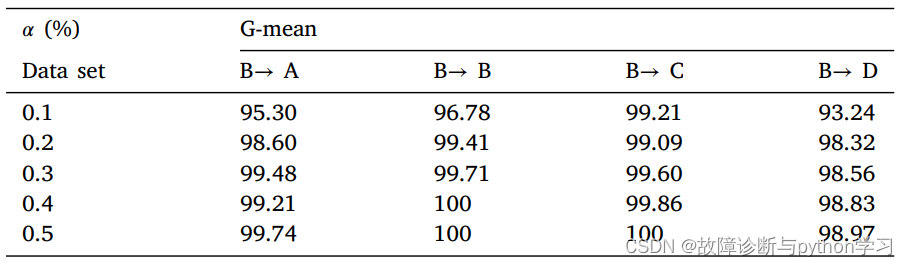
不同负载下的结果
(后续继续完善)
注:
① 若本论文对你有帮助启发,建议引用本论文~
② 欢迎关注公众号《故障诊断与Python学习》
③ 若有好的开源代码,欢迎后台联系推荐~

为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐



 16
16 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)