yolov5+deepsort实时摄像头行人跟踪(从零开始)
不知不觉这已经是我的第四篇文章了,如果有机会下次应该是分享关于分割的一些知识;无论你是仅仅想跑通代码还是其他原因,我觉得都应该了解其相关的知识再去搞一搞代码。在这里简单概述一下目标检测算法:主要分为传统的目标跟踪算法,基于深度学习的目标跟踪算法、也可以分为基于检测的目标跟踪算法(目标检测网络+跟踪部分yolov3/yolov5+deepsort/sort),基于孪生网络的跟踪算法(Sima系列),
不知不觉这已经是我的第四篇文章了,如果有机会下次应该是分享关于分割的一些知识;无论你是仅仅想跑通代码还是其他原因,我觉得都应该了解其相关的知识再去搞一搞代码。
yolov5+deepsort
在这里简单概述一下目标跟踪算法:主要分为传统的目标跟踪算法,基于深度学习的目标跟踪算法、也可以分为基于检测的目标跟踪算法(目标检测网络+跟踪部分yolov3/yolov5+deepsort/sort),基于孪生网络的跟踪算法(Sima系列),基于相关滤波的跟踪算法(MOSSE、KCF、CSK、DSST),也可以分为单目标跟踪(SOT)、多目标跟踪(MOT),大家可以自行百度一下他们。
现在很多跟踪算法都是基于单目标的目标跟踪,因为单目标跟踪是基于区域的搜索策略,会在一定的范围内去跟踪而不是全局的进行搜索去跟踪也可以称为局部跟踪;单目标跟踪通过输入第一帧的目标特征进行跟踪。基于检测的多目标跟踪:无论你第一帧是否存在目标都可以在全局进行搜索跟踪这就是基于检测的好处。
下面简单介绍一下yolov5+deepsort(基于检测的目标跟踪(全局跟踪))原理:
整体的原理流程如下:

大体的可以从图上看出:通过检测当前帧的图片和经过卡尔曼滤波预测的图片首先进行级联匹配得到三个状态(匹配成功、未匹配的预测、未匹配的检测)我觉得最不重要的应该是预测结果,让后对未匹配的结果在进行IOU匹配得到三个状态(匹配成功、未匹配的预测、未匹配的检测),没有匹配的检测结果作为新的跟踪目标,如果是没有匹配的预测(这里MAX_AGE跟踪轮数,假如我运行了70次你还是没有被匹配上你就直接被删除),这里面有一个确定态和非确定态我没有太看懂怎么区分的(有大佬可以教我一下感激不尽),所有的结果输入到卡尔曼滤波中进行一个滤波器的参数更新,因为每一帧跟踪完后为了跟踪效果更好肯定要更新跟踪参数。
大家可能会问什么是卡尔曼滤波、级联(Cascade)匹配、iou匹配?
卡尔曼滤波可以看一下视频点击一下,主要了解数据融合、卡尔曼增益、协方差矩阵、状态空间方程等(自我感觉还是有点难度)
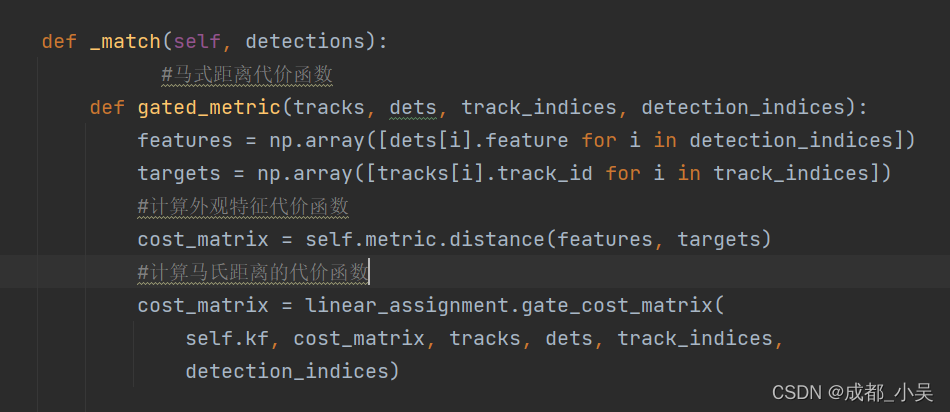
级联匹配:主要包括外观特征、马氏距离构成的代价函数。
这里的外观特征是通过我们下载的行人重识别网络权重CKpt.T7这个进行提取特征,如果大家是对人的跟踪我觉得是没有必要进行重新训练跟踪的模型,通过提取检测和预测框的特征来计算代价函数。
马氏距离通俗的也可以理解为两个框的欧氏距离来判定关联程度,(欧氏距离就是比作距离嘛这么理解比较方便)
如果你是其他的跟踪模型可以参考这篇博客![]() https://blog.csdn.net/weixin_50008473/article/details/122347582?ops_request_misc=%7B
https://blog.csdn.net/weixin_50008473/article/details/122347582?ops_request_misc=%7B
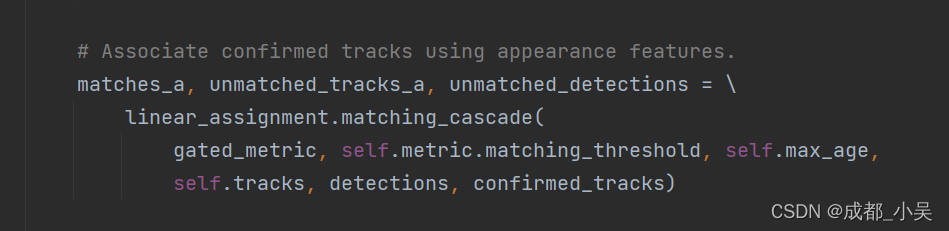
我们得到cosine 代价函数进而计算马氏距离的代价函数,通过级联匹配得到三个状态量:
接下来就是IOU匹配:
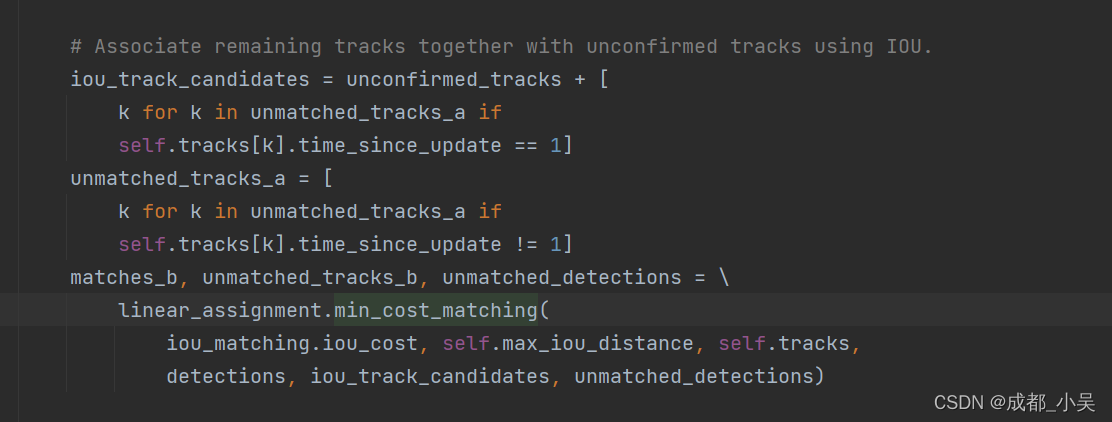
后续还有一些对未匹配到的预测结果处理部分这里不介绍了,有一些我也不是理解,核心的就这些;
deepsort 是在sort (只有IOU匹配)的基础 上加入了级联匹配(也就是这里的Cascade),
大概原理介绍完了我们来看一下我自己加的界面代码吧(这个代码是在我的第一篇文章上面进行改进添加的点击这里),我继续延用YOLOV5 4.0版本的代码,大家可以去官网下载也可以去我的第一篇博客下载权重添加至自己的YOLOV5文件夹下面。行人重识别权重我放在CSDN你们可以下载,下载完以后将其放在如下:

我还不会导入github上所以我没法上传我的源码,大家可以先下载官网源码
下载完源代码大家可以尝试运行一下track.py,在准确无误之后就可以搭建自己的界面了
第一部分模块导入:如果没有对应模块按要求下载。
import sys
from random import random
import numpy as np
sys.path.insert(0, './yolov5')
import threading
from yolov5.utils.google_utils import attempt_download
from yolov5.models.experimental import attempt_load
from yolov5.utils.datasets import LoadImages, LoadStreams
from yolov5.utils.general import check_img_size, non_max_suppression, scale_coords, \
check_imshow
from yolov5.utils.torch_utils import select_device, time_synchronized
from deep_sort_pytorch.utils.parser import get_config
from deep_sort_pytorch.deep_sort import DeepSort
import argparse
from yolov5.utils.datasets import letterbox
import os
import platform
import shutil
import time
from pathlib import Path
import cv2
import torch
import torch.backends.cudnn as cudnn
from PyQt5 import QtWidgets,QtCore,QtGui
from PyQt5.QtCore import *
from PyQt5.QtGui import *
from PyQt5.QtWidgets import *
from PyQt5.QtWidgets import QMainWindow
from untitled import Ui_MainWindow第二部分类的创建以及参数的设置:包括界面无边框移动事件
class ui_main(QMainWindow):
def __init__(self):
super(ui_main, self).__init__()
self.timer_video = QtCore.QTimer() # 创建定时器
self.ui = Ui_MainWindow()
self.ui.setupUi(self)
self.init_slots()
self.palette = (2 ** 11 - 1, 2 ** 15 - 1, 2 ** 20 - 1)
self.setWindowFlags(Qt.FramelessWindowHint)
def mouseMoveEvent(self, e: QMouseEvent): # 重写移动事件
if self._tracking:
self._endPos = e.pos() - self._startPos
self.move(self.pos() + self._endPos)
def mousePressEvent(self, e: QMouseEvent):
if e.button() == Qt.LeftButton:
self._startPos = QPoint(e.x(), e.y())
self._tracking = True
def mouseReleaseEvent(self, e: QMouseEvent):
if e.button() == Qt.LeftButton:
self._tracking = False
self._startPos = None
self._endPos = None
def paintEvent(self, event):
painter = QPainter(self)
pixmap = QPixmap('./kehuan.jpg')
painter.drawPixmap(self.rect(), pixmap)第三部分函数绑定:
def init_slots(self):
# self.ui.pushButton_img.clicked.connect(self.button_image_open)
# self.ui.pushButton_video.clicked.connect(self.button_video_open)
#模型初始化
self.ui.pushButton_2.clicked.connect(self.model_init)
#打开视频
# self.ui.pushButton_4.clicked.connect(self.open_model)
# 打开摄像头
self.ui.pushButton_3.clicked.connect(self.button_camera_open)
#关闭程序
self.ui.pushButton.clicked.connect(self.finish_detect)
# 定时器超时,将槽绑定至show_video_frame第四部分是源码边框绘制函数:
def xyxy_to_xywh(self,*xyxy):
"""" Calculates the relative bounding box from absolute pixel values. """
bbox_left = min([xyxy[0].item(), xyxy[2].item()])
bbox_top = min([xyxy[1].item(), xyxy[3].item()])
bbox_w = abs(xyxy[0].item() - xyxy[2].item())
bbox_h = abs(xyxy[1].item() - xyxy[3].item())
x_c = (bbox_left + bbox_w / 2)
y_c = (bbox_top + bbox_h / 2)
w = bbox_w
h = bbox_h
return x_c, y_c, w, h
def xyxy_to_tlwh(self,bbox_xyxy):
tlwh_bboxs = []
for i, box in enumerate(bbox_xyxy):
x1, y1, x2, y2 = [int(i) for i in box]
top = x1
left = y1
w = int(x2 - x1)
h = int(y2 - y1)
tlwh_obj = [top, left, w, h]
tlwh_bboxs.append(tlwh_obj)
return tlwh_bboxs
def compute_color_for_labels(self,label):
"""
Simple function that adds fixed color depending on the class
"""
color = [int((p * (label ** 2 - label + 1)) % 255) for p in self.palette]
return tuple(color)
@pyqtSlot()
def finish_detect(self):
self.close()
def draw_boxes(self,img, bbox, identities=None, offset=(0, 0)):
for i, box in enumerate(bbox):
x1, y1, x2, y2 = [int(i) for i in box]
x1 += offset[0]
x2 += offset[0]
y1 += offset[1]
y2 += offset[1]
# box text and bar
id = int(identities[i]) if identities is not None else 0
color = self.compute_color_for_labels(id)
label = '{}{:d}'.format("", id)
t_size = cv2.getTextSize(label, cv2.FONT_HERSHEY_PLAIN, 2, 2)[0]
cv2.rectangle(img, (x1, y1), (x2, y2), color, 3)
cv2.rectangle(
img, (x1, y1), (x1 + t_size[0] + 3, y1 + t_size[1] + 4), color, -1)
cv2.putText(img, label, (x1, y1 +
t_size[1] + 4), cv2.FONT_HERSHEY_PLAIN, 2, [255, 255, 255], 2)
return img第五部分模型初始化:
def model_init(self):
print("模型初始化")
parser = argparse.ArgumentParser()
parser.add_argument('--yolo_weights', type=str, default='yolov5/weights/yolov5s.pt', help='model.pt path')
parser.add_argument('--deep_sort_weights', type=str, default='deep_sort_pytorch/deep_sort/deep/checkpoint/ckpt.t7', help='ckpt.t7 path')
# file/folder, 0 for webcam
parser.add_argument('--source', type=str, default='0', help='source')
parser.add_argument('--output', type=str, default='inference/output', help='output folder') # output folder
parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
parser.add_argument('--conf-thres', type=float, default=0.4, help='object confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.5, help='IOU threshold for NMS')
parser.add_argument('--fourcc', type=str, default='mp4v', help='output video codec (verify ffmpeg support)')
parser.add_argument('--device', default='0', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--show-vid', action='store_true', help='display tracking video results')
parser.add_argument('--save-vid', action='store_true', help='save video tracking results')
parser.add_argument('--save-txt', action='store_true', help='save MOT compliant results to *.txt')
# class 0 is person, 1 is bycicle, 2 is car... 79 is oven
parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --class 0, or --class 16 17')
parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
parser.add_argument('--augment', action='store_true', help='augmented inference')
parser.add_argument('--evaluate', action='store_true', help='augmented inference')
parser.add_argument("--config_deepsort", type=str, default="deep_sort_pytorch/configs/deep_sort.yaml")
self.args = parser.parse_args()
# self.args.img_size = check_img_size(self.args.img_size)
out, source, yolo_weights, deep_sort_weights, imgsz = self.args.output, self.args.source, self.args.yolo_weights, self.args.deep_sort_weights ,self.args.img_size
# initialize deepsort加载deepsort的各种参数设置和模型
cfg = get_config()
print(1)
cfg.merge_from_file(self.args.config_deepsort)
print(2)
self.depp_wights = attempt_download(deep_sort_weights, repo='mikel-brostrom/Yolov5_DeepSort_Pytorch')
print(3)
self.deepsort = DeepSort(cfg.DEEPSORT.REID_CKPT,
max_dist=cfg.DEEPSORT.MAX_DIST, min_confidence=cfg.DEEPSORT.MIN_CONFIDENCE,
nms_max_overlap=cfg.DEEPSORT.NMS_MAX_OVERLAP, max_iou_distance=cfg.DEEPSORT.MAX_IOU_DISTANCE,
max_age=cfg.DEEPSORT.MAX_AGE, n_init=cfg.DEEPSORT.N_INIT, nn_budget=cfg.DEEPSORT.NN_BUDGET,
use_cuda=True)
# Initialize
print(1)
self.device = select_device(self.args.device)
self.half = self.device.type != 'cpu' # half precision only supported on CUDA
cudnn.benchmark = True
# Load model
self.model = attempt_load(yolo_weights, map_location=self.device) # load FP32 model
stride = int(self.model.stride.max()) # model stride
self.imgsz = check_img_size(imgsz, s=stride) # check img_size
if self.half:
self.model.half() # to FP16
# if webcam:
# set True to speed up constant image size inference
# dataset = LoadStreams(source, img_size=imgsz, stride=stride)
# else:
# dataset = LoadImages(source, img_size=imgsz)
# Get names and colors
self.names = self.model.module.names if hasattr(self.model, 'module') else self.model.names
self.colors = [[random.randint(0, 255) for _ in range(3)] for _ in self.names]
# Run inference
print("model initial done")
QtWidgets.QMessageBox.information(self, u"Notice", u"模型加载完成", buttons=QtWidgets.QMessageBox.Ok,
defaultButton=QtWidgets.QMessageBox.Ok)
# if self.device.type != 'cpu':
# self.model(torch.zeros(1, 3, imgsz, imgsz).to(self.device).type_as(next(self.model.parameters()))) # run once
# t0 = time.time()
# save_path = str(Path(out))
# # extract what is in between the last '/' and last '.'
# txt_file_name = source.split('/')[-1].split('.')[0]
# txt_path = str(Path(out)) + '/' + txt_file_name + '.txt'第六部分检测函数:
def detect(self,name_list,img):
showing = img
with torch.no_grad():
img = letterbox(img, new_shape=self.opt.img_size)[0]
# for frame_idx, (path, img, im0s, vid_cap) in enumerate(dataset):
img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
img = np.ascontiguousarray(img)
img = torch.from_numpy(img).to(self.device)
img = img.half() if self.half else img.float() # uint8 to fp16/32
img /= 255.0 # 0 - 255 to 0.0 - 1.0
if img.ndimension() == 3:
img = img.unsqueeze(0)
# Inference
t1 = time_synchronized()
pred = self.model(img, augment=self.args.augment)[0]
# Apply NMS
pred = non_max_suppression(
pred, self.args.conf_thres, self.args.iou_thres, classes=self.args.classes, agnostic=self.args.agnostic_nms)
t2 = time_synchronized()
# Process detections
for i, det in enumerate(pred): # detections per image
# if webcam: # batch_size >= 1
# p, s, im0 = path[i], '%g: ' % i, im0s[i].copy()
# else:
# p, s, im0 = path, '', im0s
#
# s += '%gx%g ' % img.shape[2:] # print string
# save_path = str(Path(out) / Path(p).name)
if det is not None and len(det):
# Rescale boxes from img_size to im0 size
det[:, :4] = scale_coords(
img.shape[2:], det[:, :4], showing.shape).round()
# Print results
# for c in det[:, -1].unique():
# n = (det[:, -1] == c).sum() # detections per class
# s += '%g %ss, ' % (n, self.names[int(c)]) # add to string
xywh_bboxs = []
confs = []
# Adapt detections to deep sort input format
for *xyxy, conf, cls in det:
# to deep sort format
x_c, y_c, bbox_w, bbox_h = self.xyxy_to_xywh(*xyxy)
xywh_obj = [x_c, y_c, bbox_w, bbox_h]
xywh_bboxs.append(xywh_obj)
confs.append([conf.item()])
xywhs = torch.Tensor(xywh_bboxs)
confss = torch.Tensor(confs)
# pass detections to deepsort
outputs = self.deepsort.update(xywhs, confss, img)
# draw boxes for visualization
if len(outputs) > 0:
bbox_xyxy = outputs[:, :4]
identities = outputs[:, -1]
single_info = self.draw_boxes(img, bbox_xyxy, identities)
info_show = info_show+single_info+"\n"
# to MOT format
tlwh_bboxs = self.xyxy_to_tlwh(bbox_xyxy)
# Write MOT compliant results to file
# if save_txt:
# for j, (tlwh_bbox, output) in enumerate(zip(tlwh_bboxs, outputs)):
# bbox_top = tlwh_bbox[0]
# bbox_left = tlwh_bbox[1]
# bbox_w = tlwh_bbox[2]
# bbox_h = tlwh_bbox[3]
# identity = output[-1]
# with open(txt_path, 'a') as f:
# f.write(('%g ' * 10 + '\n') % (frame_idx, identity, bbox_top,
# bbox_left, bbox_w, bbox_h, -1, -1, -1, -1)) # label format
else:
self.deepsort.increment_ages()第七部分是大家一直都想找的如何解决界面调用摄像头检测卡顿问题的代码,我在这里分享给大家禁止转发,谢谢大家!(如果有大佬可以纠正一下我的错误因为我只能这样写才能缓解当下的速度延迟问题)
def button_camera_open(self):
print("Open camera to detect")
# 设置使用的摄像头序号,系统自带为0
# camera_num ='rtsp://192.168.42.22'
# 'rtsp://admin:htkt12345@192.168.1.64:554/' 'rtsp://192.168.42.22/202202261154CHN1.264'
# camera_num = 0
# 打开摄像头
self.cap = cv2.VideoCapture(0)
# 判断摄像头是否处于打开状态
bool_open = self.cap.isOpened()
# now3 = time.time()
# print(now3)
if not bool_open:
QtWidgets.QMessageBox.warning(self, u"Warning", u"打开摄像头失败", buttons=QtWidgets.QMessageBox.Ok,
defaultButton=QtWidgets.QMessageBox.Ok)
else:
fps, w, h, save_path = self.set_video_name_and_path()
# fps = 30 # 控制摄像头检测下的fps,Note:保存的视频,播放速度有点快,我只是粗暴的调整了FPS
# self.vid_writer = cv2.VideoWriter(save_path,
# cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h))#视频保存
self.timer_video.timeout.connect(self.show_video_frame)
self.timer_video.start(1)
self.ui.pushButton_3.setDisabled(True)
# t = threading.Thread(target=self.show_video_frame)
# t.start()
def show_video_frame(self):
self.n += 1
flag, img = self.cap.read()
# 获取视频帧读取
if self.n % 4 == 0:
# print(self.n)
if img is not None:
# 开启子线程进行检测
p = threading.Thread(target=self.detection, args=(img,))
p.start()
# # 暂停与继续检测
def detection(self, img):
name_list = []
# print(x)
info_show = self.detect(name_list, img) # 检rif测结果写入到原始img上
show = cv2.resize(img, (640, 640)) # 直接将原始img上的检测结果进行显示
self.result = cv2.cvtColor(show, cv2.COLOR_BGR2RGB)
showImage = QtGui.QImage(self.result.data, self.result.shape[1], self.result.shape[0],
QtGui.QImage.Format_RGB888)
self.ui.label_2.setFixedSize(758, 424)
self.ui.label_2.setPixmap(QtGui.QPixmap.fromImage(showImage))
self.ui.label_2.setScaledContents(True)
if __name__ == '__main__':
app = QtWidgets.QApplication(sys.argv)
ui = ui_main()
qssStyle = '''
QLabel {
border:1px solid white
}
QPushButton{
background:transparent;
font: bold 16px;
border:1px solid white
}
'''
ui.setStyleSheet(qssStyle)
ui.show()
sys.exit(app.exec_())
这么快就结束了,如果有什么建议可以进群交流学习:471550878

为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐


 23
23 1
1- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)