OpenCV-Python身份证信息识别
使用OpenCV-Python和CnOcr对身份证图像识别
OpenCV-Python身份证信息识别
本篇文章使用OpenCV-Python和CnOcr来实现身份证信息识别的案例。想要识别身份证中的文本信息,总共分为三大步骤:一、通过预处理身份证区域检测查找;二、身份证文本信息提取;三、身份证文本信息识别。下面来看一下识别的具体过程CnOcr官网。识别过程视频
前置环境
这里的环境需要安装OpenCV-Python,Numpy和CnOcr。本篇文章使用的Python版本为3.6,OpenCV-Python版本为3.4.1.15,如果是4.x版本的同学,可能会有一些Api操作不同。这些依赖的安装和介绍,我就不在这里赘述了,均是使用Pip进行安装。
识别过程
首先,导入所需要的依赖cv2,numpy,cnocr并创建一个show图像的函数,方便后面使用:
import cv2
import numpy as np
from cnocr import CnOcr
def show(image, window_name):
cv2.namedWindow(window_name, 0)
cv2.imshow(window_name, image)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 加载CnOcr的模型
ocr = CnOcr(model_name='densenet_lite_136-gru')
身份证区域查找
通过对加载图像的灰度处理–>滤波处理–>二值处理–>边缘检测–>膨胀处理–>轮廓查找–>透视变换(校正)–>图像旋转–>固定图像大小一系列处理之后,我们便可以清晰的裁剪出身份证的具体区域。
原始图像
使用OpenCV的imread方法读取本地图片。
image = cv2.imread('card.png')
show(image, "image")

灰度处理
将三通道BGR图像转化为灰度图像,因为一下OpenCV操作都是需要基于灰度图像进行的。
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
show(gray, "gray")

中值滤波
使用滤波处理,也就是模糊处理,这样可以减少一些不需要的噪点。
blur = cv2.medianBlur(gray, 7)
show(blur, "blur")

二值处理
二值处理,非黑即白。这里通过cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU,使用OpenCV的大津法二值化,对图像进行处理,经过处理后的图像,更加清晰的分辨出了背景和身份证的区域。
threshold = cv2.threshold(blur, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)[1]
show(threshold, "threshold")

边缘检测
使用OpenCV中最常用的边缘检测方法,Canny,检测出图像中的边缘。
canny = cv2.Canny(threshold, 100, 150)
show(canny, "canny")

边缘膨胀
为了使上一步边缘检测的边缘更加连贯,使用膨胀处理,对白色的边缘膨胀,即边缘线条变得更加粗一些。
kernel = np.ones((3, 3), np.uint8)
dilate = cv2.dilate(canny, kernel, iterations=5)
show(dilate, "dilate")

轮廓检测
使用findContours对边缘膨胀过的图片进行轮廓检测,可以清晰的看到背景部分还是有很多噪点的,所需要识别的身份证部分也被轮廓圈了起来。
binary, contours, hierarchy = cv2.findContours(dilate, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
image_copy = image.copy()
res = cv2.drawContours(image_copy, contours, -1, (255, 0, 0), 20)
show(res, "res")

轮廓排序
经过对轮廓的面积排序,我们可以准确的提取出身份证的轮廓。
contours = sorted(contours, key=cv2.contourArea, reverse=True)[0]
image_copy = image.copy()
res = cv2.drawContours(image_copy, contours, -1, (255, 0, 0), 20)
show(res, "contours")

透视变换
通过对轮廓近似提取出轮廓的四个顶点,并按顺序进行排序,之后通过warpPerspective对所选图像区域进行透视变换,也就是对所选的图像进行校正处理。
epsilon = 0.02 * cv2.arcLength(contours, True)
approx = cv2.approxPolyDP(contours, epsilon, True)
n = []
for x, y in zip(approx[:, 0, 0], approx[:, 0, 1]):
n.append((x, y))
n = sorted(n)
sort_point = []
n_point1 = n[:2]
n_point1.sort(key=lambda x: x[1])
sort_point.extend(n_point1)
n_point2 = n[2:4]
n_point2.sort(key=lambda x: x[1])
n_point2.reverse()
sort_point.extend(n_point2)
p1 = np.array(sort_point, dtype=np.float32)
h = sort_point[1][1] - sort_point[0][1]
w = sort_point[2][0] - sort_point[1][0]
pts2 = np.array([[0, 0], [0, h], [w, h], [w, 0]], dtype=np.float32)
# 生成变换矩阵
M = cv2.getPerspectiveTransform(p1, pts2)
# 进行透视变换
dst = cv2.warpPerspective(image, M, (w, h))
# print(dst.shape)
show(dst, "dst")

固定图像大小
将图像变正,通过对图像的宽高进行判断,如果宽<高,就将图像旋转90°。并将图像resize到指定大小。方便之后对图像进行处理。
if w < h:
dst = np.rot90(dst)
resize = cv2.resize(dst, (1084, 669), interpolation=cv2.INTER_AREA)
show(resize, "resize")

检测身份证文本位置
经过灰度,二值滤波和开闭运算后,将图像中的文本区域主键显现出来。
temp_image = resize.copy()
gray = cv2.cvtColor(resize, cv2.COLOR_BGR2GRAY)
show(gray, "gray")
threshold = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)[1]
show(threshold, "threshold")
blur = cv2.medianBlur(threshold, 5)
show(blur, "blur")
kernel = np.ones((3, 3), np.uint8)
morph_open = cv2.morphologyEx(blur, cv2.MORPH_OPEN, kernel)
show(morph_open, "morph_open")

极度膨胀
给定一个比较大的卷积盒,进行膨胀处理,使白色的区域加深加大。更加显现出文本的区域。
kernel = np.ones((7, 7), np.uint8)
dilate = cv2.dilate(morph_open, kernel, iterations=6)
show(dilate, "dilate")

轮廓查找文本区域
使用轮廓查找,将白色块状区域查找出来。
binary, contours, hierarchy = cv2.findContours(dilate, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
resize_copy = resize.copy()
res = cv2.drawContours(resize_copy, contours, -1, (255, 0, 0), 2)
show(res, "res")

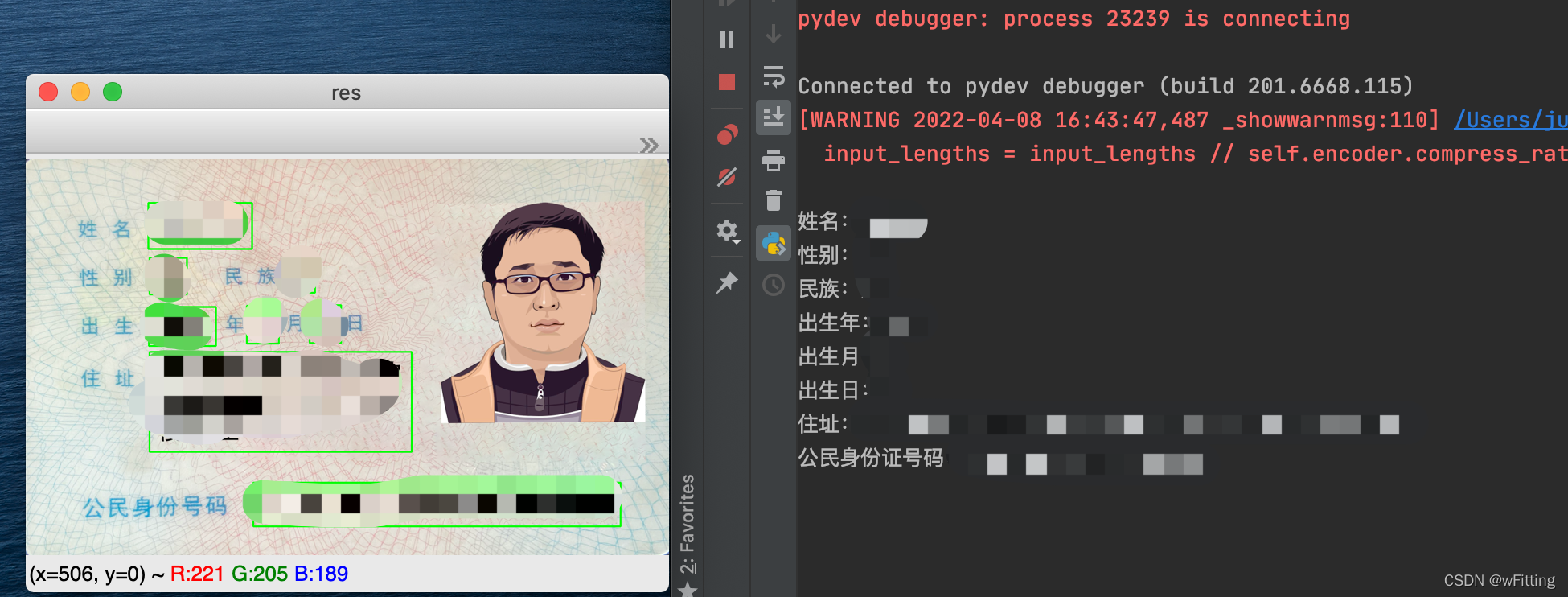
筛选出文本区域
经过上一步轮廓检测,我们发现,选中的轮廓中有一些噪点,通过对图像的观察,使用近似轮廓,然后用以下逻辑筛选出文本区域。并定义文本描述信息,将文本区域位置信息加入到指定集合中。到这一步,可以清晰的看到,所需要的文本区域统统都被提取了出来。
labels = ['姓名', '性别', '民族', '出生年', '出生月', '出生日', '住址', '公民身份证号码']
positions = []
data_areas = {}
resize_copy = resize.copy()
for contour in contours:
epsilon = 0.002 * cv2.arcLength(contour, True)
approx = cv2.approxPolyDP(contour, epsilon, True)
x, y, w, h = cv2.boundingRect(approx)
if h > 50 and x < 670:
res = cv2.rectangle(resize_copy, (x, y), (x + w, y + h), (0, 255, 0), 2)
area = gray[y:(y + h), x:(x + w)]
blur = cv2.medianBlur(area, 3)
data_area = cv2.threshold(blur, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)[1]
positions.append((x, y))
data_areas['{}-{}'.format(x, y)] = data_area
show(res, "res")

对文本区域进行排序
发现文本的区域是由下到上的顺序,并且x轴从左到右的的区域是无序的,所以使用以下逻辑,对文本区域进行排序
positions.sort(key=lambda p: p[1])
result = []
index = 0
while index < len(positions) - 1:
if positions[index + 1][1] - positions[index][1] < 10:
temp_list = [positions[index + 1], positions[index]]
for i in range(index + 1, len(positions)):
if positions[i + 1][1] - positions[i][1] < 10:
temp_list.append(positions[i + 1])
else:
break
temp_list.sort(key=lambda p: p[0])
positions[index:(index + len(temp_list))] = temp_list
index = index + len(temp_list) - 1
else:
index += 1
识别文本
对文本区域使用CnOcr一一进行识别,最后将识别结果进行输出。
for index in range(len(positions)):
position = positions[index]
data_area = data_areas['{}-{}'.format(position[0], position[1])]
ocr_data = ocr.ocr(data_area)
ocr_result = ''.join([''.join(result[0]) for result in ocr_data]).replace(' ', '')
# print('{}:{}'.format(labels[index], ocr_result))
result.append('{}:{}'.format(labels[index], ocr_result))
show(data_area, "data_area")
for item in result:
print(item)
show(res, "res")

结语
通过以上的步骤,便成功的将身份证信息进行了提取,过程中的一些数字参数,可能会在不同的场景中有些许的调整。
以下放上所有的代码:
代码
import cv2
import numpy as np
from cnocr import CnOcr
def show(image, window_name):
cv2.namedWindow(window_name, 0)
cv2.imshow(window_name, image)
# 0任意键终止窗口
cv2.waitKey(0)
cv2.destroyAllWindows()
ocr = CnOcr(model_name='densenet_lite_136-gru')
image = cv2.imread('card.png')
show(image, "image")
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
show(gray, "gray")
blur = cv2.medianBlur(gray, 7)
show(blur, "blur")
threshold = cv2.threshold(blur, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)[1]
show(threshold, "threshold")
canny = cv2.Canny(threshold, 100, 150)
show(canny, "canny")
kernel = np.ones((3, 3), np.uint8)
dilate = cv2.dilate(canny, kernel, iterations=5)
show(dilate, "dilate")
binary, contours, hierarchy = cv2.findContours(dilate, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
image_copy = image.copy()
res = cv2.drawContours(image_copy, contours, -1, (255, 0, 0), 20)
show(res, "res")
contours = sorted(contours, key=cv2.contourArea, reverse=True)[0]
image_copy = image.copy()
res = cv2.drawContours(image_copy, contours, -1, (255, 0, 0), 20)
show(res, "contours")
epsilon = 0.02 * cv2.arcLength(contours, True)
approx = cv2.approxPolyDP(contours, epsilon, True)
n = []
for x, y in zip(approx[:, 0, 0], approx[:, 0, 1]):
n.append((x, y))
n = sorted(n)
sort_point = []
n_point1 = n[:2]
n_point1.sort(key=lambda x: x[1])
sort_point.extend(n_point1)
n_point2 = n[2:4]
n_point2.sort(key=lambda x: x[1])
n_point2.reverse()
sort_point.extend(n_point2)
p1 = np.array(sort_point, dtype=np.float32)
h = sort_point[1][1] - sort_point[0][1]
w = sort_point[2][0] - sort_point[1][0]
pts2 = np.array([[0, 0], [0, h], [w, h], [w, 0]], dtype=np.float32)
M = cv2.getPerspectiveTransform(p1, pts2)
dst = cv2.warpPerspective(image, M, (w, h))
# print(dst.shape)
show(dst, "dst")
if w < h:
dst = np.rot90(dst)
resize = cv2.resize(dst, (1084, 669), interpolation=cv2.INTER_AREA)
show(resize, "resize")
temp_image = resize.copy()
gray = cv2.cvtColor(resize, cv2.COLOR_BGR2GRAY)
show(gray, "gray")
threshold = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)[1]
show(threshold, "threshold")
blur = cv2.medianBlur(threshold, 5)
show(blur, "blur")
kernel = np.ones((3, 3), np.uint8)
morph_open = cv2.morphologyEx(blur, cv2.MORPH_OPEN, kernel)
show(morph_open, "morph_open")
kernel = np.ones((7, 7), np.uint8)
dilate = cv2.dilate(morph_open, kernel, iterations=6)
show(dilate, "dilate")
binary, contours, hierarchy = cv2.findContours(dilate, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
resize_copy = resize.copy()
res = cv2.drawContours(resize_copy, contours, -1, (255, 0, 0), 2)
show(res, "res")
labels = ['姓名', '性别', '民族', '出生年', '出生月', '出生日', '住址', '公民身份证号码']
positions = []
data_areas = {}
resize_copy = resize.copy()
for contour in contours:
epsilon = 0.002 * cv2.arcLength(contour, True)
approx = cv2.approxPolyDP(contour, epsilon, True)
x, y, w, h = cv2.boundingRect(approx)
if h > 50 and x < 670:
res = cv2.rectangle(resize_copy, (x, y), (x + w, y + h), (0, 255, 0), 2)
area = gray[y:(y + h), x:(x + w)]
blur = cv2.medianBlur(area, 3)
data_area = cv2.threshold(blur, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)[1]
positions.append((x, y))
data_areas['{}-{}'.format(x, y)] = data_area
show(res, "res")
positions.sort(key=lambda p: p[1])
result = []
index = 0
while index < len(positions) - 1:
if positions[index + 1][1] - positions[index][1] < 10:
temp_list = [positions[index + 1], positions[index]]
for i in range(index + 1, len(positions)):
if positions[i + 1][1] - positions[i][1] < 10:
temp_list.append(positions[i + 1])
else:
break
temp_list.sort(key=lambda p: p[0])
positions[index:(index + len(temp_list))] = temp_list
index = index + len(temp_list) - 1
else:
index += 1
for index in range(len(positions)):
position = positions[index]
data_area = data_areas['{}-{}'.format(position[0], position[1])]
ocr_data = ocr.ocr(data_area)
ocr_result = ''.join([''.join(result[0]) for result in ocr_data]).replace(' ', '')
# print('{}:{}'.format(labels[index], ocr_result))
result.append('{}:{}'.format(labels[index], ocr_result))
show(data_area, "data_area")
for item in result:
print(item)
show(res, "res")

华为开发者空间,是为全球开发者打造的专属开发空间,汇聚了华为优质开发资源及工具,致力于让每一位开发者拥有一台云主机,基于华为根生态开发、创新。
更多推荐



 33
33 3
3- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)