python图像处理(十一)——图像锐化与边缘检测之Roberts算子、Prewitt算子、Sobel算子、Laplacian算子
在图像增强过程中,通常利用各类图像平滑算法消除噪声,图像的常见噪声主要有加性噪声、乘性噪声和量化噪声等。一般来说,图像的能量主要集中在其低频部分,噪声所在的频段主要在高频段,同时图像边缘信息也主要集中在其高频部分。这将导致原始图像在平滑处理之后,图像边缘和图像轮廓模糊的情况出现。为了减少这类不利效果的影响,就需要利用图像锐化技术,使图像的边缘变得清晰。一、Roberts算子Roberts算子又称交
在图像增强过程中,通常利用各类图像平滑算法消除噪声,图像的常见噪声主要有加性噪声、乘性噪声和量化噪声等。一般来说,图像的能量主要集中在其低频部分,噪声所在的频段主要在高频段,同时图像边缘信息也主要集中在其高频部分。这将导致原始图像在平滑处理之后,图像边缘和图像轮廓模糊的情况出现。为了减少这类不利效果的影响,就需要利用图像锐化技术,使图像的边缘变得清晰。
一、Roberts算子
Roberts算子又称交叉微分算法,它是基于交叉差分的梯度算法,通过局部差分计算检测边缘线条,常来处理具有陡峭的低噪声图像,当图像边缘接近于正负45,处理效果最佳。缺点是对边缘定位信息不太准确,提取的边缘线条较粗。Roberts算子模板分为水平方向和垂直方向。
在python中Roberts算子主要是通过Numpy定义模板,再调用OpenCV中的filter2D()函数实现边缘提取,该函数主要是利用内核实现对图像的卷积运算,其函数原型如下:
dst=cv.filter2D(src, ddepth, kernel[, dst[, anchor[, delta[, borderType]]]])
参数如下:
src 原图像 dst 目标图像,与原图像尺寸和通过数相同 ddepth 目标图像的所需深度 kernel 卷积核(或相当于相关核),单通道浮点矩阵;如果要将不同的内核应用于不同的通道,请使用拆分将图像拆分为单独的颜色平面,然后单独处理它们。 anchor 内核的锚点,指示内核中过滤点的相对位置;锚应位于内核中;默认值(-1,-1)表示锚位于内核中心。 detal 在将它们存储在dst中之前,将可选值添加到已过滤的像素中。类似于偏置。 borderType 像素外推法,参见BorderTypes
Roberts算法代码如下所示:
import cv2
import matplotlib.pyplot as plt
import numpy as np
#读取图像
image = cv2.imread('E:/pythonProject/12.png')
lena = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
#灰度转化处理
grayImage = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
#roberts算子
kernelx = np.array([[-1, 0], [0, 1]], dtype= int)
kernely = np.array([[0, -1], [1, 0]], dtype= int)
x = cv2.filter2D(grayImage, cv2.CV_16S, kernelx)
y = cv2.filter2D(grayImage, cv2.CV_16S, kernely)
#转uint8
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
#加权和
Roberts = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
#显示中文标签
plt.rcParams['font.sans-serif'] = ['SimHei']
#图像显示
titles = [u'原始图像', u'Robertes图像']
images = [lena, Roberts]
for i in range(2):
plt.subplot(1, 2, i+1), plt.imshow(images[i], 'gray')
plt.xticks([]), plt.yticks([])
plt.title(titles[i])
plt.show()输出结果如下所示:

二、Prewitt算子
Prewitt算子是一种图像边缘检测的微分算子,由于Prewitt算子采用3*3模板对区域中的像素进行计算,而Roberts算子的是利用2*2模板,因此,Prewitt算子边缘检测结果在水平方向和垂直方向均比Roberts算子更加明显。Prewitt算子适合用来处理噪声较多,灰度渐变的图像。
在python中,Prewitt算子处理过程与Roberts算子较为相似,主要是通过Numpy定义模板,再调用OpenCV中的filter2D()函数实现对图像的卷积运算,最终通过cv2.convertScaleAbs(),和cv2.addWeighted()实现图像边缘提取。
Prewitt算法代码如下所示:
import cv2
import numpy as np
import matplotlib.pyplot as plt
#输入图像
image = cv2.imread('E:/pythonProject/12.png')
lena = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
#灰度转化处理
grayImage = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
#kernel
kernelX = np.array([[1, 1, 1], [0, 0, 0], [-1, -1, -1]],dtype= int)
kernelY = np.array([[-1, 0, 1], [-1, 0, 1], [-1, 0, 1]],dtype= int)
x = cv2.filter2D(grayImage, cv2.CV_16S, kernelX)
y = cv2.filter2D(grayImage, cv2.CV_16S, kernelY)
#转uint8
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
#加权和
Prewitt = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
#图象显示
plt.rcParams['font.sans-serif'] = ['SimHei']
titles = [u'原始图像', u'Prewitt图像']
images = [lena, Prewitt]
for i in range(2):
plt.subplot(1, 2, i+1), plt.imshow(images[i], 'gray')
plt.xticks([]), plt.yticks([])
plt.title(titles[i])
plt.show()输出结果如下所示:

从其效果图输出可以明显看出,Prewitt算子在垂直方向和水平方向其边缘检测结果均比Roberts算子边缘检测轮廓要更明显。
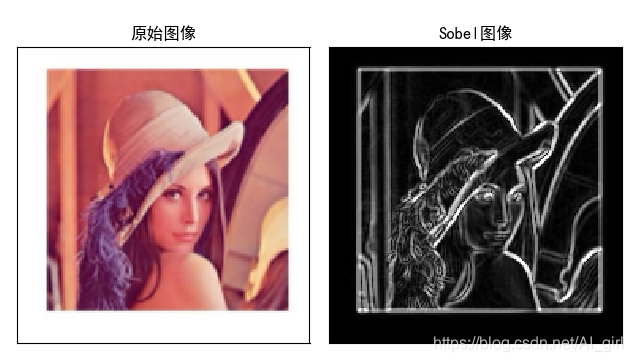
三、Sobel算子
Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。
函数原型:
sobelx = cv2.Sobel(img,cv2.CV_64F, 1, 0, ksize=3)
- img表示原图像
- 利用Sobel方法可以进行sobel边缘检测 img表示源图像,即进行边缘检测的图像 cv2.CV_64F表示64位浮点数即64float, 这里不使用numpy.float64,因为可能会发生溢出现象。
- 用cv的数据则会自动 第三和第四个参数分别是对X和Y方向的导数(即dx,dy),对于图像来说就是差分,这里1表示对X求偏导(差分),0表示不对Y求导(差分),其中,X还可以求2次导。 (注意:对X求导就是检测X方向上是否有边缘。)
- 第五个参数ksize是指核的大小。
在sobel处理之后还要用cv2.convertScaleAbs()求其绝对值,并将图像转化为uint8格式。
Sobel算法代码如下所示:
import cv2
import matplotlib.pyplot as plt
#读取图像
image = cv2.imread('E:/pythonProject/12.png')
lean = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
#转灰度图像
grayImage = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
#Sobel算子
x = cv2.Sobel(grayImage, cv2.CV_16S, 1, 0)#对x一阶求导
y = cv2.Sobel(grayImage, cv2.CV_16S, 0, 1)#对y一阶求导
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Sobel = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
#图像输出
plt.rcParams['font.sans-serif'] = ['SimHei']
titles = [u'原始图像', u'Sobel图像']
images = [lean, Sobel]
for i in range(2):
plt.subplot(1, 2, i+1), plt.imshow(images[i], 'gray')
plt.xticks([]), plt.yticks([])
plt.title(titles[i])
plt.show()输出结果如下所示:
四、Laplacian算子
Laplace函数实现的方法是先用Sobel 算子计算二阶x和y导数,再求和。
函数原型:
dst = cv2.Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]])
必须的参数:
- scr是需要处理的图像;
- ddepth是图像的深度,-1表示采用的是与原图像相同的深度。目标图像的深度必须大于等于原图像的深度;
可选的参数:
- dst表示输出边缘图,其大小和通道数与输入图像相同;
- ksize是算子的大小,必须为1、3、5、7。默认为1。
- scale是缩放导数的比例常数,默认情况下没有伸缩系数;
- delta是一个可选的增量,将会加到最终的dst中,同样,默认情况下没有额外的值加到dst中;
- borderType是判断图像边界的模式。这个参数默认值为cv2.BORDER_DEFAULT。
Laplacian算子代码如下所示:
import cv2
import matplotlib.pyplot as plt
#读取图像
image = cv2.imread('E:/pythonProject/12.png')
lean = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
#转灰度图像
grayImage = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
#拉普拉斯算法
dst = cv2.Laplacian(grayImage, cv2.CV_16S, ksize= 3)
Laplacian = cv2.convertScaleAbs(dst)
#图像输出
plt.rcParams['font.sans-serif'] = ['SimHei']
titles = [u'原始图像', u'Laplacian图像']
images = [lean, Laplacian]
for i in range(2):
plt.subplot(1, 2, i+1), plt.imshow(images[i], 'gray')
plt.xticks([]), plt.yticks([])
plt.title(titles[i])
plt.show()
输出结果如下所示:

今天先写这么多,后期持续更新~

为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐



 18
18 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)