数据包络分析期望效率--DDF(方向距离函数)
DDF方向距离函数--文献文献介绍内容介绍方向距离函数DDF定义效率评估Directional calculation method(DVS)三级目录文献介绍文献名字是:Expected efficiency based on directional distance function in data envelopment analysis。首先,这篇文章是在2018年computerIndus
文献介绍
文献名字是:Expected efficiency based on directional distance function in data envelopment analysis。
首先,这篇文章是在2018年
c
o
m
p
u
t
e
r
I
n
d
u
s
t
r
i
a
l
E
n
g
i
n
e
e
r
i
n
g
computer Industrial Engineering
computerIndustrialEngineering上发表的,还有李勇军老师!!!
这篇文章偏模型,是期望DDF模型,有兴趣的朋友可以看看。
内容介绍
方向距离函数DDF定义
首先,方向距离函数。也就是 D D F DDF DDF函数,是一种不受径向限制的、沿预先确定的方向向量估计决策单元相对效率的方法。
比如说,有
n
n
n个
D
M
U
s
DMU_s
DMUs,且投入变量与产出变量分别用矩阵表示为
X
=
(
x
i
j
)
∈
ℜ
m
×
n
X=(x_{ij})\in\Re^{m\times n}
X=(xij)∈ℜm×n和
Y
=
(
y
r
j
)
∈
ℜ
s
×
n
Y=(y_{rj})\in\Re^{s\times n}
Y=(yrj)∈ℜs×n。本文假设规模报酬是可变的,即是
V
R
S
VRS
VRS的,那么此时的生产可能集就变成:
T
=
⟮
(
x
i
,
y
r
)
∣
∑
j
λ
j
x
i
j
≤
x
i
,
i
=
1
,
…
,
m
,
∑
j
λ
j
y
r
j
≥
y
r
,
r
=
1
,
…
,
s
,
∑
j
λ
j
=
1
,
λ
j
≥
0
,
j
=
1
,
…
,
n
⟯
T=\lgroup(x_i,y_r)\vert\sum_{j}\lambda_jx_{ij}\leq{x_i},i=1,\dots,m,\sum_{j}\lambda_jy_{rj}\ge{}y_r,r=1,\dots,s,\sum_{j}\lambda_j=1,\lambda_{}j\ge0,j=1,\dots,n\rgroup
T=⟮(xi,yr)∣j∑λjxij≤xi,i=1,…,m,j∑λjyrj≥yr,r=1,…,s,j∑λj=1,λj≥0,j=1,…,n⟯
把方向向量记作
g
=
(
−
g
x
,
g
y
)
≠
0
m
+
s
,
g
x
∈
R
+
m
,
g
y
∈
R
+
s
g=(-g_x,g_y)\ne0_{m+s},g_x\in{}R_{+}^{m},g_y\in{}R_{+}^{s}
g=(−gx,gy)=0m+s,gx∈R+m,gy∈R+s,那么这个方向距离函数可以表示成:
a
⃗
T
(
x
,
y
;
g
)
=
s
u
p
{
β
:
(
x
−
β
g
x
,
y
+
β
g
y
)
∈
T
}
\vec{a}_T(x,y;g)=sup\{\beta: (x-\beta{}g_x, y+\beta{}g_y)\in{}T\}
aT(x,y;g)=sup{β:(x−βgx,y+βgy)∈T}
那么,接下来,给出最初始的
D
D
F
DDF
DDF模型:
m
a
x
β
s
.
t
.
∑
j
=
1
n
λ
j
x
i
j
≤
x
i
0
−
β
g
x
,
i
=
1
,
…
,
m
∑
j
=
1
n
λ
j
y
r
j
≥
y
r
0
+
β
g
y
,
r
=
1
,
…
,
s
∑
j
=
1
n
λ
j
=
1
,
j
=
1
,
…
,
n
λ
j
≥
0
,
β
≥
0
max \beta\\s.t.\sum_{j=1}^{n}\lambda_jx_{ij}\leq{}x_{i0}-\beta{}g_x,i=1,\dots,m \\\sum_{j=1}^{n}\lambda_{j}y_{rj}\geq{}y_{r0}+\beta{}g_y,r=1,\dots,s\\\sum_{j=1}^{n}\lambda_{j}=1,j=1,\dots,n\\\lambda_j\ge0,\beta\ge0
maxβs.t.j=1∑nλjxij≤xi0−βgx,i=1,…,mj=1∑nλjyrj≥yr0+βgy,r=1,…,sj=1∑nλj=1,j=1,…,nλj≥0,β≥0
在上述模型中, β \beta β是用来衡量无效率的一个变量。当 β = 0 \beta=0 β=0时候,意味着 D M U 0 DMU_{0} DMU0是有效的。但是存在着一个问题,方向向量 g = ( − g x , g y ) g=(-g_x,g_y) g=(−gx,gy)是可以任意选择的。(针对这一点,文献中用期望效率来解决。)
效率评估
如果按着上述公式,只看 β = 0 \beta=0 β=0的值就进行是否有效的判断,是不合理的。因为 β = 0 \beta=0 β=0的大小受方向向量大小的影响,若有些方向向量取得过小,可能会导致 β > 1 \beta>1 β>1。
为解决这个问题,针对方向向量 g = ( − g x , g y ) , g x ∈ R + m , g y ∈ R + s , ∀ i , r g=(-g_x,g_y),g_x\in{R_{+}^{m}},g_y\in{R_{+}^{s}},\forall{i,r} g=(−gx,gy),gx∈R+m,gy∈R+s,∀i,r,目标函数改为:
θ 0 = 1 − 1 m ∑ i = 1 m β g x i x i 0 1 + 1 s ∑ r = 1 s β g y r y r 0 \theta_{0}=\frac{1-\frac{1}{m}\sum_{i=1}^{m}\beta{\frac{g_{xi}}{x_{i0}}}}{1+\frac{1}{s}\sum_{r=1}^{s}\beta{\frac{g_{yr}}{y_{r0}}}} θ0=1+s1∑r=1sβyr0gyr1−m1∑i=1mβxi0gxi
其中, β g x i x i 0 \beta{\frac{g_{xi}}{x_{i0}}} βxi0gxi和 β g y r y r 0 \beta{\frac{g_{yr}}{y_{r0}}} βyr0gyr分别是缩小投入的比例及扩大产出的比例。
基于新的目标函数,上述模型公式可转变成为:
θ 0 = 1 − 1 m ∑ i = 1 m β g x i x i 0 1 + 1 s ∑ r = 1 s β g y r y r 0 s . t . ∑ j = 1 n λ j x i j ≤ x i 0 − β g x , i = 1 , … , m ∑ j = 1 n λ j y r j ≥ y r 0 + β g y , r = 1 , … , s ∑ j = 1 n λ j = 1 , j = 1 , … , n λ j ≥ 0 , β ≥ 0 \theta_{0}=\frac{1-\frac{1}{m}\sum_{i=1}^{m}\beta{\frac{g_{xi}}{x_{i0}}}}{1+\frac{1}{s}\sum_{r=1}^{s}\beta{\frac{g_{yr}}{y_{r0}}}}\\s.t.\sum_{j=1}^{n}\lambda_jx_{ij}\leq{}x_{i0}-\beta{}g_x,i=1,\dots,m \\\sum_{j=1}^{n}\lambda_{j}y_{rj}\geq{}y_{r0}+\beta{}g_y,r=1,\dots,s\\\sum_{j=1}^{n}\lambda_{j}=1,j=1,\dots,n\\\lambda_j\ge0,\beta\ge0 θ0=1+s1∑r=1sβyr0gyr1−m1∑i=1mβxi0gxis.t.j=1∑nλjxij≤xi0−βgx,i=1,…,mj=1∑nλjyrj≥yr0+βgy,r=1,…,sj=1∑nλj=1,j=1,…,nλj≥0,β≥0
考虑到单位不变这个性质,这篇文献中是对原始数据做了归一化处理。由于在目标函数中,原始数据会作为分母进行运算,因此,处理的原则就是,数据不可以变为0。
归一化处理一般的有三种方式。这里只提及文献中所说的,令:
x
^
i
j
=
x
i
j
m
a
x
j
x
i
j
,
y
^
r
j
=
y
r
j
m
a
x
j
y
r
j
,
i
=
1
,
…
,
m
;
r
=
1
,
…
,
s
;
j
=
1
,
…
,
n
\widehat{x}_{ij}=\frac{x_{ij}}{\mathop{max}\limits_{j}{x_{ij}}},\widehat{y}_{rj}=\frac{y_{rj}}{\mathop{max}\limits_{j}{y_{rj}}},i=1,\dots,m;r=1,\dots,s;j=1,\dots,n
x
ij=jmaxxijxij,y
rj=jmaxyrjyrj,i=1,…,m;r=1,…,s;j=1,…,n
由于原始数据的改变,那么对应模型公式的符号作出相应的变化:
θ
0
=
1
−
1
m
∑
i
=
1
m
β
g
x
i
x
^
i
0
1
+
1
s
∑
r
=
1
s
β
g
y
r
y
^
r
0
s
.
t
.
∑
j
=
1
n
λ
j
x
^
i
j
≤
x
^
i
0
−
β
g
x
,
i
=
1
,
…
,
m
∑
j
=
1
n
λ
j
y
^
r
j
≥
y
^
r
0
+
β
g
y
,
r
=
1
,
…
,
s
∑
j
=
1
n
λ
j
=
1
,
j
=
1
,
…
,
n
λ
j
≥
0
,
β
≥
0
\theta_{0}=\frac{1-\frac{1}{m}\sum_{i=1}^{m}\beta{\frac{g_{xi}}{\widehat{x}_{i0}}}}{1+\frac{1}{s}\sum_{r=1}^{s}\beta{\frac{g_{yr}}{\widehat{y}_{r0}}}}\\s.t.\sum_{j=1}^{n}\lambda_j\widehat{x}_{ij}\leq{}\widehat{x}_{i0}-\beta{}g_x,i=1,\dots,m \\\sum_{j=1}^{n}\lambda_{j}\widehat{y}_{rj}\geq{}\widehat{y}_{r0}+\beta{}g_y,r=1,\dots,s\\\sum_{j=1}^{n}\lambda_{j}=1,j=1,\dots,n\\\lambda_j\ge0,\beta\ge0
θ0=1+s1∑r=1sβy
r0gyr1−m1∑i=1mβx
i0gxis.t.j=1∑nλjx
ij≤x
i0−βgx,i=1,…,mj=1∑nλjy
rj≥y
r0+βgy,r=1,…,sj=1∑nλj=1,j=1,…,nλj≥0,β≥0
文献中还特别提及,此时,不管方向向量取值多少,都不会改变目标函数的值。(若有兴趣看证明,可自行查阅文献,打公式太累了)
Directional calculation method(DVS)
这块知识,涉及到了辛钦大数定律的知识。
文献中简单介绍了DVS的内容:
U
^
\widehat{U}
U
作为欧几里得空间非负象限中的所有单位向量的集合,是以圆点为中心,半径为1的向量集合,是无限集合。并且把
E
^
\widehat{E}
E
作为从
U
^
\widehat{U}
U
中均匀抽取的集合,这个
E
^
\widehat{E}
E
就被叫做方向向量集合,是有限集合。
只要样本量足够大, E ^ \widehat{E} E 的集合接近 U ^ \widehat{U} U 。
核心思想就是:方向向量均匀取值得足够多,也就是方向向量旋转角度足够小,计算出来的效率值就接近真实期望值。
具体算法
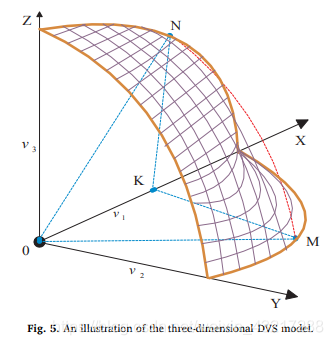
这里只介绍三位情况:
对于三维情况,也就是两个投入、一个产出时,
U
^
3
=
{
(
v
1
,
v
2
,
v
3
)
∣
0
≤
v
1
,
v
2
,
v
3
≤
1
}
\widehat{U}^{3}=\lbrace{(v_1,v_2,v_3)|0\leq{}v_1,v_2,v_3\leq{}1}\rbrace
U
3={(v1,v2,v3)∣0≤v1,v2,v3≤1},这是一个三维空间上非负象限里以圆点为中心,半径为1的球体部分。如图:
step1: 令
v
1
=
sin
(
d
∗
ϕ
)
,
d
=
0
,
1
,
2
,
…
,
π
/
2
ϕ
v_1=\sin(d*\phi),d=0,1,2,\dots,\pi/2\phi
v1=sin(d∗ϕ),d=0,1,2,…,π/2ϕ,其中
ϕ
\phi
ϕ是旋转区间角度。
step2:当
d
=
0
d=0
d=0时,那么令
v
1
=
0
v_1=0
v1=0。如果
(
l
∗
ϕ
)
/
1
−
(
sin
2
(
d
∗
ϕ
)
)
>
π
/
2
(l*\phi)/\sqrt{1-(\sin^2(d*\phi))}>\pi/2
(l∗ϕ)/1−(sin2(d∗ϕ))>π/2,那么
v
2
=
1
−
v
1
2
v_2=\sqrt{1-v_1^{2}}
v2=1−v12并且
v
3
=
0
v_3=0
v3=0;或者说如果
v
1
2
+
(
1
−
sin
2
(
d
∗
ϕ
)
∗
sin
(
l
∗
ϕ
/
1
−
sin
2
(
d
∗
ϕ
)
)
)
2
≤
1
v_1^{2}+(\sqrt{1-\sin^2(d*\phi)}*\sin(l*\phi/\sqrt{1-\sin^2(d*\phi)}))^2\le1
v12+(1−sin2(d∗ϕ)∗sin(l∗ϕ/1−sin2(d∗ϕ)))2≤1,那么令
v
2
=
1
−
sin
2
(
d
∗
ϕ
)
∗
sin
(
2
sin
−
1
(
sin
(
l
∗
ϕ
/
2
)
/
1
−
sin
2
(
d
∗
ϕ
)
)
)
v_2=\sqrt{1-\sin^2(d*\phi)}*\sin(2\sin^{-1}(\sin{(l*\phi/2})/\sqrt{1-\sin^2(d*\phi)}))
v2=1−sin2(d∗ϕ)∗sin(2sin−1(sin(l∗ϕ/2)/1−sin2(d∗ϕ))),并且如果
1
−
v
1
2
−
v
2
2
>
0
1-v_1^2-v_2^2>0
1−v12−v22>0,那么
v
3
=
1
−
v
1
2
−
v
2
2
v_3=\sqrt{1-v_1^2-v_2^2}
v3=1−v12−v22。当
l
=
0
,
1
,
2
,
…
,
π
/
2
ϕ
l=0,1,2,\dots,\pi/2\phi
l=0,1,2,…,π/2ϕ,遍历step2。
step3:当
d
=
0
,
1
,
2
,
…
,
π
/
2
ϕ
d=0,1,2,\dots,\pi/2\phi
d=0,1,2,…,π/2ϕ遍历步骤2。
three-dimension 例子
这里,拿出文献中的example1进行说明。
首先,数据为两个 投入一个产出的69个DMUs。(文献中没有给出原始数据,但是由于这篇文章主要阐述的模型,所以如果真想实现的话,可以自行搜索数据)
将数据放入模型中,作者说总共得到了20933个方向向量,但是我个人复现的时候,却有29400左右个,很迷惑。
若有朋友对这篇文献有兴趣,欢迎一起讨论。

为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐



 10
10 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)