无人驾驶虚拟仿真(四)--通过ROS系统控制小车行走
简介:实现键盘控制虚拟仿真小车移动,w/s/a/d/空格,对应向前/向后/向左/向右/急停切换功能,q键退出
简介:实现键盘控制虚拟仿真小车移动,w/s/a/d/空格,对应向前/向后/向左/向右/急停切换功能,q键退出
1、创建key_control节点
进入工作空间源码目录:
$ cd ~/myros/catkin_ws/src/
创建功能包:
$ catkin_create_pkg key_control rospy std_msgs duckietown_msgs
创建源码文件:
$ touch key_control/src/key_control_node.py
修改编译配置文件:
$ gedit key_control/CMakeLists.txt

修改为:

2、编写节点代码
$ gedit key_control/src/key_control_node.py
代码主要功能包括启动仿真环境,监听键盘输入,判断键盘输入发布控制指令话题,
附源码:
#!/usr/bin/env python3
# -*- coding: utf-8 -*
import os
import sys
import tty, termios
import roslib
import rospy
from duckietown_msgs.msg import Twist2DStamped, BoolStamped
class KeyControlNode():
def __init__(self):
rospy.init_node('key_control_node')
self.v = 0.0
self.omega = 0.0
self.estop = False
self.pub_car_cmd = rospy.Publisher('/duckietown/duckiebot_node/car_cmd', Twist2DStamped, queue_size=10)
self.pub_e_stop = rospy.Publisher('/duckietown/duckiebot_node/emergency_stop', BoolStamped, queue_size=10)
def keyDetect(self):
thread_stop = False
rate = rospy.Rate(10)
while not thread_stop:
fd = sys.stdin.fileno()
old_settings = termios.tcgetattr(fd)
try :
tty.setraw( fd )
ch = sys.stdin.read(1)
finally :
termios.tcsetattr(fd, termios.TCSADRAIN, old_settings)
print(ch)
if ch == 'w':
self.v = 0.2
self.omega = 0.3
elif ch == 's':
self.v = -0.2
self.omega = 0.3
elif ch == 'a':
self.v = 0.2
self.omega = 1
elif ch == 'd':
self.v = 0.2
self.omega = -1
elif ch == 'q':
self.v = 0.0
self.omega = 0.0
thread_stop = True
else:
if self.estop:
e_stop_msg = BoolStamped()
e_stop_msg.data = False
self.pub_e_stop.publish(e_stop_msg)
self.estop = False
else:
e_stop_msg = BoolStamped()
e_stop_msg.data = True
self.pub_e_stop.publish(e_stop_msg)
self.estop = True
msg_car_cmd = Twist2DStamped()
msg_car_cmd.v = self.v
msg_car_cmd.omega = self.omega
self.pub_car_cmd.publish(msg_car_cmd)
rate.sleep()
if __name__ == '__main__':
keyControlNode = KeyControlNode()
keyControlNode.keyDetect()3、编译
$ cd ~/myros/catkin_ws
$ catkin_make
4、运行
运行需要3个终端,一个运行roscore与duckiebot节点,一个开ros视频流查看软件,一个开key_control节点:
注:每新开一个终端,都要执行环境变量设置命令
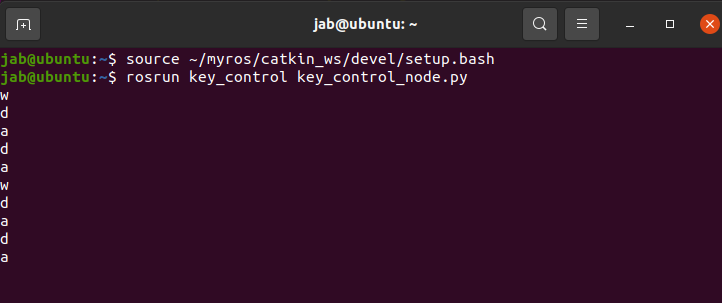
$ source ~/myros/catkin_ws/devel/setup.bash
终端1:$ roslaunch duckiebot duckiebot.launch
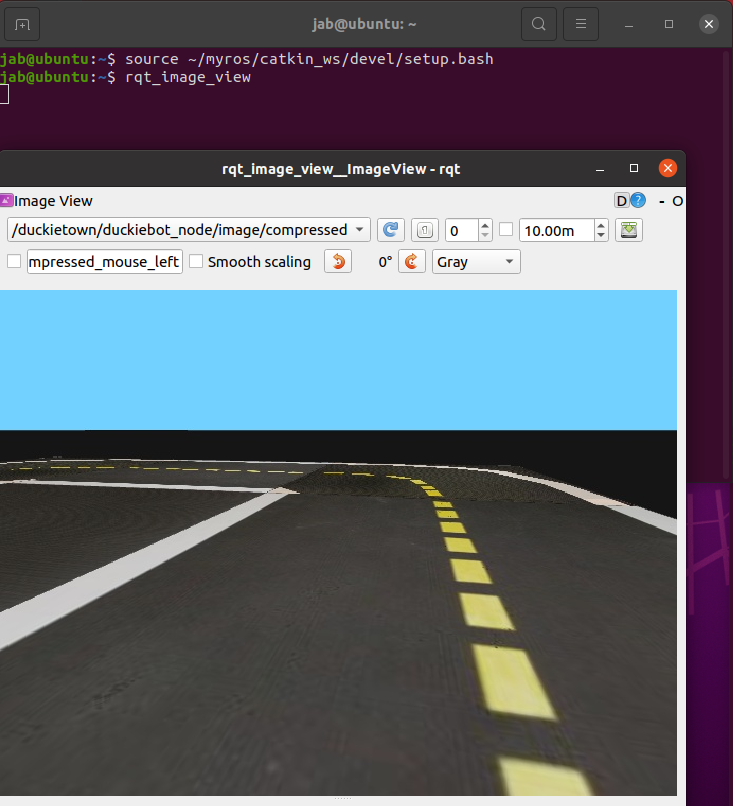
终端2:$ rqt_image_view
终端3:$ rosrun key_control key_control_node.py
通过键盘上的w/s/a/d键控制小车移动方向,空格键急停切换,q键退出

为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐



 1
1 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)