Python中的图像处理(第十四章)Python图像分割(1)
Python中的图像处理(第十四章)Python图像分割(1)前言一. Python准备二.Python仿真三. 小结前言随着人工智能研究的不断兴起,Python的应用也在不断上升,由于Python语言的简洁性、易读性以及可扩展性,特别是在开源工具和深度学习方向中各种神经网络的应用,使得Python已经成为最受欢迎的程序设计语言之一。由于完全开源,加上简单易学、易读、易维护、以及其可移植性、解释性
Python中的图像处理(第十四章)Python图像分割(1)
前言
随着人工智能研究的不断兴起,Python的应用也在不断上升,由于Python语言的简洁性、易读性以及可扩展性,特别是在开源工具和深度学习方向中各种神经网络的应用,使得Python已经成为最受欢迎的程序设计语言之一。由于完全开源,加上简单易学、易读、易维护、以及其可移植性、解释性、可扩展性、可扩充性、可嵌入性:丰富的库等等,自己在学习与工作中也时常接触到Python,这个系列文章的话主要就是介绍一些在Python中常用一些例程进行仿真演示!
本系列文章主要参考杨秀章老师分享的代码资源,杨老师博客主页是Eastmount,杨老师兴趣广泛,不愧是令人膜拜的大佬,他过成了我理想中的样子,希望以后有机会可以向他请教学习交流。
因为自己是做图像语音出身的,所以结合《Python中的图像处理》,学习一下Python相关,OpenCV已经在Python上进行了多个版本的维护,所以相比VS,Python的环境配置相对简单,缺什么库直接安装即可。本系列文章例程都是基于Python3.8的环境下进行,所以大家在进行借鉴的时候建议最好在3.8.0版本以上进行仿真。本文继续来对本书第十四章的5个例程进行介绍。
一. Python准备
如何确定自己安装好了python
win+R输入cmd进入命令行程序
点击“确定”
输入:python,回车
看到Python相关的版本信息,说明Python安装成功。
二. Python仿真
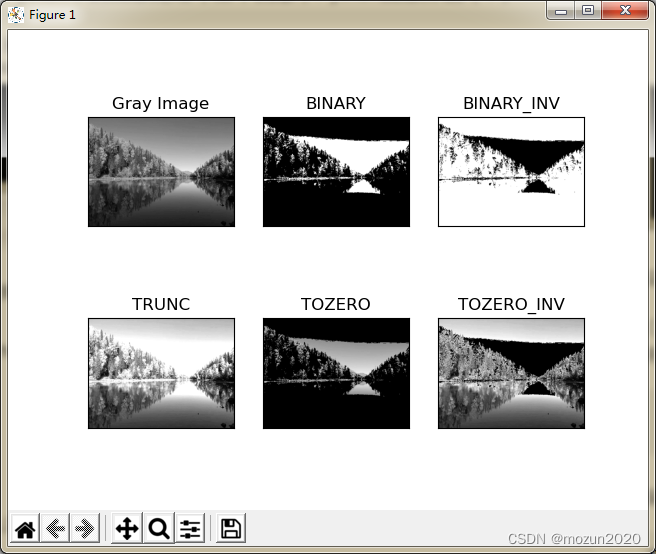
(1)新建一个chapter14_01.py文件,输入以下代码,图片也放在与.py文件同级文件夹下
# -*- coding: utf-8 -*-
# 2021-05-17 Eastmount CSDN
import cv2
import numpy as np
import matplotlib.pyplot as plt
#读取图像
img=cv2.imread('scenery.png')
grayImage=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#阈值化处理
ret,thresh1=cv2.threshold(grayImage,127,255,cv2.THRESH_BINARY)
ret,thresh2=cv2.threshold(grayImage,127,255,cv2.THRESH_BINARY_INV)
ret,thresh3=cv2.threshold(grayImage,127,255,cv2.THRESH_TRUNC)
ret,thresh4=cv2.threshold(grayImage,127,255,cv2.THRESH_TOZERO)
ret,thresh5=cv2.threshold(grayImage,127,255,cv2.THRESH_TOZERO_INV)
#显示结果
titles = ['Gray Image','BINARY','BINARY_INV','TRUNC',
'TOZERO','TOZERO_INV']
images = [grayImage, thresh1, thresh2, thresh3, thresh4, thresh5]
for i in range(6):
plt.subplot(2,3,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
保存.py文件
输入eixt()退出python,输入命令行进入工程文件目录
输入以下命令,跑起工程
python chapter14_01.py
没有报错,直接弹出图片,运行成功!
(2)新建一个chapter14_02.py文件,输入以下代码,图片也放在与.py文件同级文件夹下
# -*- coding: utf-8 -*-
# 2021-05-17 Eastmount CSDN
import cv2
import numpy as np
import matplotlib.pyplot as plt
#读取图像
img = cv2.imread('scenery.png')
rgb_img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
#灰度化处理图像
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#阈值处理
ret, binary = cv2.threshold(grayImage, 127, 255, cv2.THRESH_BINARY)
#Roberts算子
kernelx = np.array([[-1,0],[0,1]], dtype=int)
kernely = np.array([[0,-1],[1,0]], dtype=int)
x = cv2.filter2D(binary, cv2.CV_16S, kernelx)
y = cv2.filter2D(binary, cv2.CV_16S, kernely)
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Roberts = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
#Prewitt算子
kernelx = np.array([[1,1,1],[0,0,0],[-1,-1,-1]], dtype=int)
kernely = np.array([[-1,0,1],[-1,0,1],[-1,0,1]], dtype=int)
x = cv2.filter2D(binary, cv2.CV_16S, kernelx)
y = cv2.filter2D(binary, cv2.CV_16S, kernely)
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Prewitt = cv2.addWeighted(absX,0.5,absY,0.5,0)
#Sobel算子
x = cv2.Sobel(binary, cv2.CV_16S, 1, 0)
y = cv2.Sobel(binary, cv2.CV_16S, 0, 1)
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Sobel = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
#拉普拉斯算法
dst = cv2.Laplacian(binary, cv2.CV_16S, ksize = 3)
Laplacian = cv2.convertScaleAbs(dst)
# Scharr算子
x = cv2.Scharr(binary, cv2.CV_32F, 1, 0) #X方向
y = cv2.Scharr(binary, cv2.CV_32F, 0, 1) #Y方向
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Scharr = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
#Canny算子
gaussianBlur = cv2.GaussianBlur(binary, (3,3), 0) #高斯滤波
Canny = cv2.Canny(gaussianBlur , 50, 150)
#LOG算子
gaussianBlur = cv2.GaussianBlur(binary, (3,3), 0) #高斯滤波
dst = cv2.Laplacian(gaussianBlur, cv2.CV_16S, ksize = 3)
LOG = cv2.convertScaleAbs(dst)
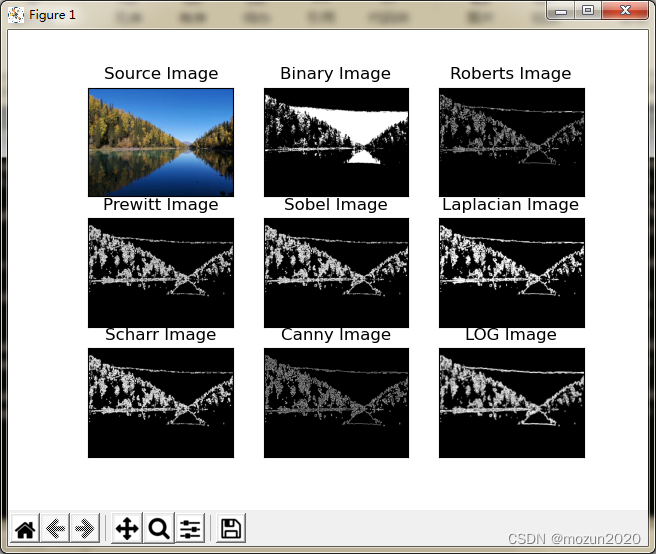
#效果图
titles = ['Source Image', 'Binary Image', 'Roberts Image',
'Prewitt Image','Sobel Image', 'Laplacian Image',
'Scharr Image', 'Canny Image', 'LOG Image']
images = [rgb_img, binary, Roberts, Prewitt,
Sobel, Laplacian, Scharr, Canny, LOG]
for i in np.arange(9):
plt.subplot(3,3,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
保存.py文件输入以下命令,跑起工程
python chapter14_02.py
没有报错,直接弹出图片,运行成功!
(3)新建一个chapter14_03.py文件,输入以下代码,图片也放在与.py文件同级文件夹下
# -*- coding: utf-8 -*-
# 2021-05-17 Eastmount CSDN
import cv2
import numpy as np
import matplotlib.pyplot as plt
#读取图像
img = cv2.imread('scenery.png')
rgb_img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
#灰度化处理图像
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#阈值化处理
ret, binary = cv2.threshold(grayImage, 0, 255,
cv2.THRESH_BINARY+cv2.THRESH_OTSU)
#边缘检测
contours, hierarchy = cv2.findContours(binary, cv2.RETR_TREE,
cv2.CHAIN_APPROX_SIMPLE)
#轮廓绘制
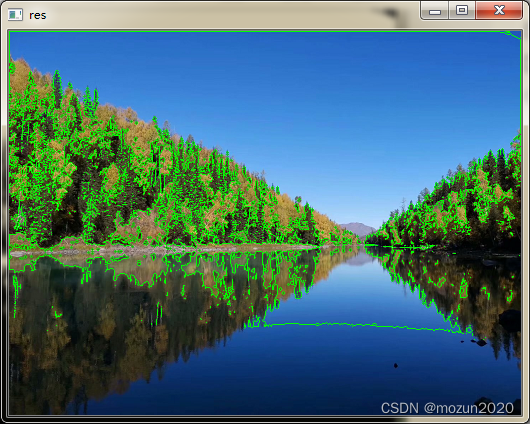
cv2.drawContours(img, contours, -1, (0, 255, 0), 1)
#显示图像5
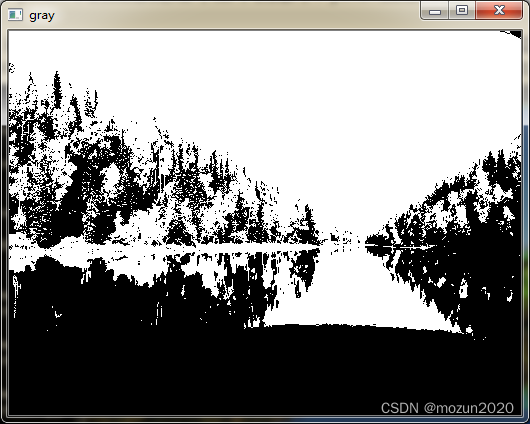
cv2.imshow('gray', binary)
cv2.imshow('res', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
保存.py文件输入以下命令,跑起工程
python chapter14_03.py
没有报错,直接弹出图片,运行成功!
(4)新建一个chapter14_04.py文件,输入以下代码,图片也放在与.py文件同级文件夹下
# -*- coding: utf-8 -*-
# 2021-05-17 Eastmount CSDN
import cv2
import numpy as np
import matplotlib.pyplot as plt
#读取图像
img = cv2.imread('test.png')
#灰度化处理图像
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#设置掩码、fgbModel、bgModel
mask = np.zeros(img.shape[:2], np.uint8)
bgdModel = np.zeros((1,65), np.float64)
fgdModel = np.zeros((1,65), np.float64)
#矩形坐标
rect = (100, 100, 500, 800)
#图像分割
cv2.grabCut(img, mask, rect, bgdModel, fgdModel, 5,
cv2.GC_INIT_WITH_RECT)
#设置新掩码:0和2做背景
mask2 = np.where((mask==2)|(mask==0), 0, 1).astype('uint8')
#显示原图
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
plt.subplot(1,2,1)
plt.imshow(img)
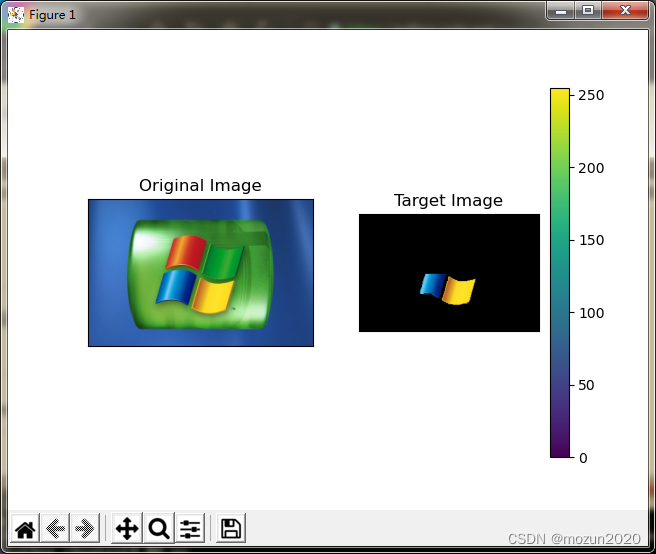
plt.title('Original Image')
plt.xticks([]), plt.yticks([])
#使用蒙板来获取前景区域
img = img*mask2[:, :, np.newaxis]
plt.subplot(1,2,2)
plt.imshow(img)
plt.title('Target Image')
plt.colorbar()
plt.xticks([]), plt.yticks([])
plt.show()
保存.py文件输入以下命令,跑起工程
python chapter14_04.py

没有报错,直接弹出图片,运行成功!
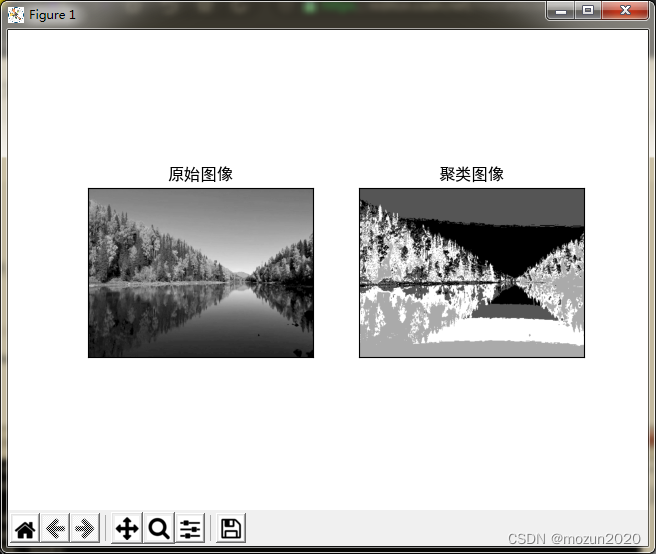
(5)新建一个chapter14_05.py文件,输入以下代码,图片也放在与.py文件同级文件夹下
# coding: utf-8
# 2021-05-17 Eastmount CSDN
import cv2
import numpy as np
import matplotlib.pyplot as plt
#读取原始图像灰度颜色
img = cv2.imread('scenery.png', 0)
print(img.shape)
#获取图像高度、宽度和深度
rows, cols = img.shape[:]
#图像二维像素转换为一维
data = img.reshape((rows * cols, 1))
data = np.float32(data)
#定义中心 (type,max_iter,epsilon)
criteria = (cv2.TERM_CRITERIA_EPS +
cv2.TERM_CRITERIA_MAX_ITER, 10, 1.0)
#设置标签
flags = cv2.KMEANS_RANDOM_CENTERS
#K-Means聚类 聚集成4类
compactness, labels, centers = cv2.kmeans(data, 4, None, criteria, 10, flags)
#生成最终图像
dst = labels.reshape((img.shape[0], img.shape[1]))
#用来正常显示中文标签
plt.rcParams['font.sans-serif']=['SimHei']
#显示图像
titles = [u'原始图像', u'聚类图像']
images = [img, dst]
for i in range(2):
plt.subplot(1,2,i+1), plt.imshow(images[i], 'gray'),
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
保存.py文件输入以下命令,跑起工程
python chapter14_05.py
没有报错,直接打印数据,弹出图片,运行成功!
三. 小结
本文主要介绍在Python中调用OpenCV库对图像进行分割,包括简单阈值化处理分割,边缘检测算子阈值分割,k-means聚类分割等。由于本书的介绍比较系统全面,所以会出一个系列文章进行全系列仿真实现,下一篇文章将继续介绍第十四章节的5例仿真实例,感兴趣的还是建议去原书第十四章深入学习理解。每天学一个Python小知识,大家一起来学习进步阿!
本系列示例主要参考杨老师GitHub源码,安利一下地址:ImageProcessing-Python(喜欢记得给个star哈!)

为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐



 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)