【Photoscan/Metashape 使用说明书笔记】
Photoscan使用说明笔记
Chapter 3 通用流程
Metashape 处理图像主要包括以下步骤:
- 将图像加载到 Metashape 中
- 图像质量检查,提前删除质量较差的影像
- 图像定向(空中三角测量/Structure from Motion)
- 构建密集点云
- 构建网格(3D 多边形模型)
- 生成纹理
- 导出结果
2. 图像定向/空三参数选择
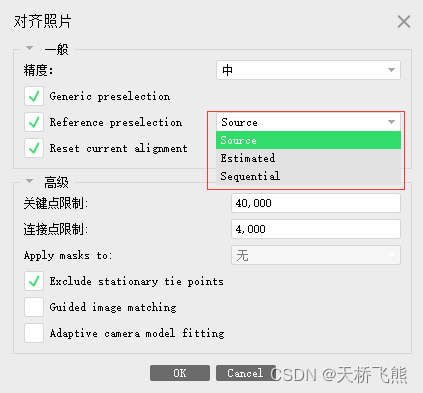
精度(Accuracy)
| 最高精度 | 源影像放大4倍 |
|---|---|
| 高精度 | 原分辨率 |
| 中等精度 | 源影像缩放4倍 |
| 低精度 | 源影像缩放16倍 |
- 最高精度 源影像放大4倍
- 高精度 原分辨率
- 中等精度 源影像缩放4倍
- 低精度 源影像缩放16倍
Generic preselection mode(通用预选模式)
大型照片集的校准过程可能需要很长的时间。这段时间的很大一部分用于照片集的特征匹配。
图像对预选选项可能会加速这一过程,由于选择一个子集的图像对要匹配。
在通用预选模式下,通过使用低精度设置首先匹配照片来选择重叠的照片对。
Note
在图像匹配阶段,只使用参考预选模式而不使用通用预选模式最适合于只检测到少量连接点的情况,这种情况可能发生在森林地区或农田的航空调查中。
像对预选:参考+通用(如果相机位置未知 - 只能使用通用预选模式)
Reference preselection mode(参考预选模式)
-
在Source preselection mode下,根据测量的相机位置(如果存在)选择重叠的照片对。对于倾斜图像,需要在参考面板(Reference pane)的"设置 Settings"对话框中设置捕获距离值(为相机坐标数据设置的同一坐标系的平均地面高度) ,以使预选程序有效运行。捕获距离信息必须附有偏航(yaw),俯仰(pitch),滚动(roll)/omega,phi,kappa的相机数据。旋转参数应在“参考”窗格中输入。然后根据计算出的新的三维点作为原始三维点和矢量,在摄像机视角方向上进行预选,其长度等于输入的捕获距离值
-
估计预选模式(Estimated preselection mode)考虑了已经计算出外方位元素的对齐相机。也就是说,如果项目的图像定向操作已经完成,那么在重新运行图像定向程序并选择估计预选模式时,将考虑已经估计出的相机位置。
-
在使用序列预选模式(Sequential preselection mode)时,图像之间的对应关系是根据照片序列(图像的序列号)确定的,值得注意的是,通过这种调整,序列中的第一个图像和最后一个图像也将进行比较。
Reset current alignment(重置当前定向结果)
如果选中此选项,则将丢弃所有连接点、关键点和匹配点,并从最开始启动定向过程。
Key point limit(影像特征提取上限)
该数字表示当前处理阶段需要考虑的每幅图像特征点的上限。使用零值允许 Metashape 找到尽可能多的关键点,但它可能会导致大量不太可靠的点。
Tie point limit(连接点匹配上限)
该数字表示每幅图像的匹配点上限。使用零值不应用任何连接点过滤。
Apply mask to(蒙版重建)
如果选择在关键点(Key points)上使用蒙版选项,那么以前在照片上使用遮罩的区域将被排除在特征提取程序之外。将遮罩应用于连接点选项意味着某些连接点被排除在对齐程序之外。实际上,这意味着如果某个区域至少在一张照片上被掩盖,那么在对齐过程中也将忽略其余照片上相同区域的相关关键点。这可能是有用的,能够抑制背景在转盘拍摄的情况下,只有一个蒙版。有关使用蒙版的其他信息,请参阅"Using Mask"一节。
A tie point is a set of key points which have been matched as projections of the same 3D point on different images
Exclude stationary tie points(排除静止连接点)
不包括在多个不同图像上保持静止的连接点。这个选项允许对于具有静态背景的数据集不使用掩码进行对齐,例如在具有固定摄像机场景的转盘的情况下。此外,启用此选项将有助于消除与相机传感器或镜头人工制品有关的虚假连接点。
Guided image matching
这个选项允许有效地增加每个图像的关键点数量,就好像关键点限制的值直接增加了一样,但是没有显著增加处理时间。使用该参数可以提高植被(林地、草地、玉米地等)、球面相机和高分辨率图像(由专业级相机、卫星或通过高分辨率扫描获得的航空档案图像)的成像效果。要启用引导图像匹配,请检查对齐照片“Align Photos”对话框中的相应选项,并根据需要调整每 Mpx 的关键点限制。每张图像检测到的点数计算为(每个 Mpx 的关键点限制) * (图像大小以 Mpx 表示)。小分数将被广泛匹配,并用作剩余点匹配的指导。
Adaptive camera model fitting(自适应相机模型)
自适应相机模型拟合这个选项允许根据可靠性估计自动选择相机参数进行调整。对于具有强摄像机几何形状的数据集,比如从周围各个方向拍摄的建筑物图像,包括不同的层次,它有助于在初始摄像机对齐过程中调整更多的参数。对于摄像机几何形状较弱的数据集,如典型的航空数据集,它有助于防止一些参数的发散。例如,对于目标只覆盖中心小部分的数据集,径向畸变参数的估计是非常不可靠的。当选项未经检查时,Metashape 将只改进一组固定的参数: 焦距,主点位置,三个径向失真系数(K1,K2,K3)和两个切向失真系数(P1,P2)。
Note
- 连接点限制参数允许为任务优化性能,并且通常不影响进一步模型的质量。建议值是10000。过高或过低的连接点极限值可能导致密集点云模型的某些部分被遗漏。原因是 Metashape 只为匹配点数超过一定限制的照片对生成深度映射。这个上限相当于100个配对点,除非按照“有关照片与其他34张照片之间的最大配对点数的10% ,只有与边界框内的区域相对应的配对点被考虑”这个数字上移
- 通过“工具”菜单中的“连接点-薄点云”命令对齐过程,可以减少连接点的数量。作为一个结果,连接点云将变薄,但是对齐将保持不变。
Tools - Tie Points - Thin Point Cloud
3. 照片质量
1.Metashape 可以自动估计照片质量。
建议禁用质量值小于 0.5 个单位的图像,并将其排除在摄影测量处理之外。
2.通过在“参考”窗口中右键单击照片,选择“估计图像质量…”,然后选择“所有相机”,可以估计图像质量。
3.要显示照片的估计图像质量,请在“照片”窗格中将查看模式更改为“详细信息”。
4.您现在可以按“质量”列进行排序。选择质量低于 0.5 的照片并将其禁用。
- 按国家规定我国1:2.5-1:50万地形图均采用6度分带;1:1万及更大比例尺地形图采用3度分带,以保证必要的精度。
- 6度分带投影:即经差为6度,从零度子午线开始,自西向东每隔6度为一个投影带,全球共分60个带,用1,2,3,4,5,…表示。即东经0~6度为第一度带,其中央经线的经度为东经3度;东经6-12度为第二带,其中央经线的经度为东经9度。
- 3度分带投影:即经差为3度,从东经1.5度开始,自西向东每隔3度为一个投影带,全球共分120个带,用1,2,3,4,5,…表示。即东经1.5-4.5度为第一度带,其中央经线的经度为东经3度;东经4.5-7.5度为第二带,其中央经线的经度为东经6度;东经7.5~10.5度为第三带,其中央经线的经度为东经9度。(这样分带的方法使6度带的中央经线均为3度带的中央经线。)
- 我国经度范围西起73°,东至135°,横跨11个六度带,对应带号是13-23度带,三度带比6度带大一倍,基本上就是24-45度带
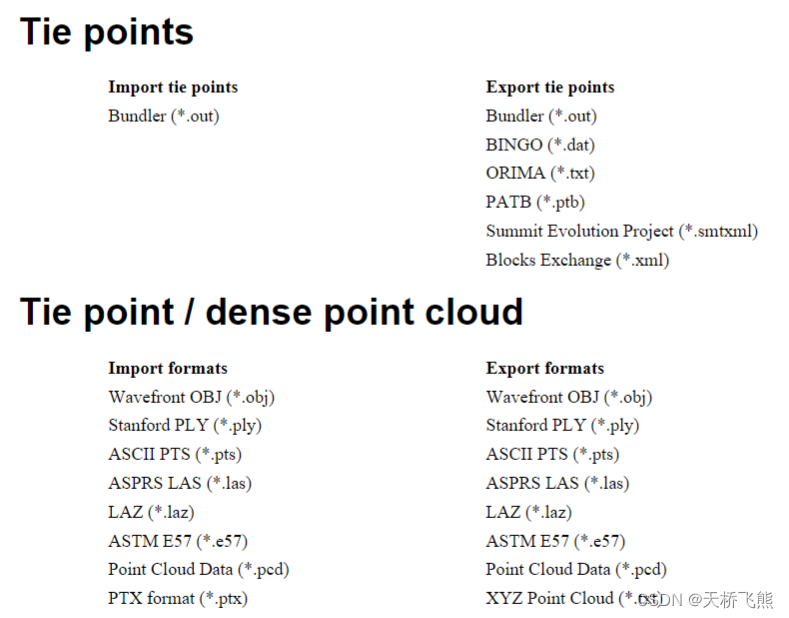
4. 点云输出
可以输出连接点或密集匹配点云
- 从“文件”菜单中选择“导出点云”命令。
- 选择输出文件夹,选择文件类型,然后输入文件名。单击“保存”按钮。
- “导出点云”对话框中,选择所需类型的点云: 连接点(Tie Points)或密集点云
- 指示适用于所选文件类型的导出参数。
- 单击“确定”按钮开始导出。
- 将出现显示当前处理状态的进度对话框。
某些情况,在导出点云之前进行处理和编辑可能更好。要了解点云编辑,请参阅手册中的编辑点云部分。
Metashape 支持以下格式的点云导出:
- Wavefront OBJ (*.obj)
- Stanford PLY (*.ply)
- XYZ Point Cloud (*.txt)
- ASPRS LAS (*.las)
- LAZ (*.laz)
- ASTM E57 (*.e57)
- Topcon CL3 (*.cl3)
- ASCII PTS (*.pts)
- Autodesk DXF (*.dxf)
- U3D (*.u3d)
- Adobe PDF (*.pdf)
- PCL库的Point Cloud Data (*.pcd)
- potree (*.zip)
- Cesium 3D Tiles (*.zip)
- Agisoft OC3 (*.oc3)
注意
OBJ和DXF格式不支持保存点云颜色
LAS, LAZ, PTS, CL3 and DXF不支持保存点云法向量
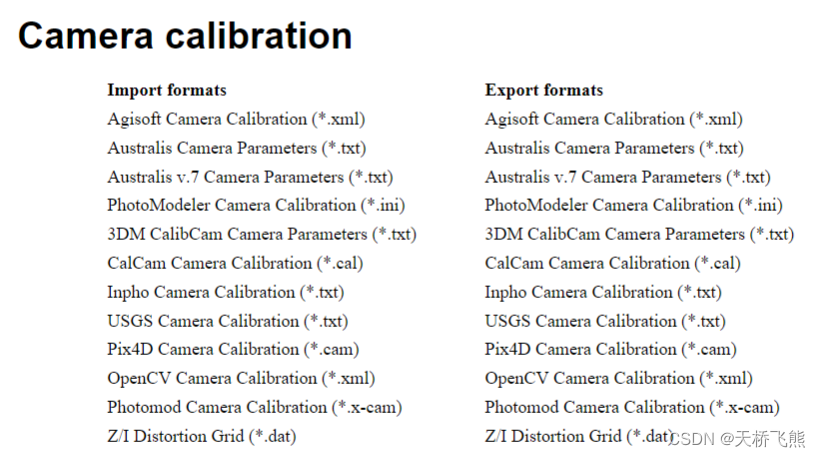
5 空三成果导出格式
Aerial Triangulation/Structure from Motion成果包括:相机标定参数、相机内外方位元素、连接点(Tie Points)
常用格式
Blocks Exchange(.xml)是ContextCapture的区块文件,其中包含了相机组、相机位姿、连接点二维坐标和三维坐标等各种信息。
PhotoScan也可以和传统的航摄空三软件对接,比如Inpho、Pix4D
Inpho Project File(.prj)、Pix4D Camera Calibration(*.cam)


为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐



 9
9 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)