Python出租车GPS数据处理(TransBigData)
使用TransBigData包进行出租车GPS数据处理使用示例中的样例数据集在github仓库中,链接为:https://github.com/ni1o1/transbigdata/tree/main/example下面我们介绍如何使用TransBigData包,调用其中的函数实现对出租车GPS数据的快速处理。首先我们引入TransBigData包,并读取数据:import transbigdat
使用TransBigData包进行出租车GPS数据处理
使用示例中的样例数据集在github仓库中,链接为:https://github.com/ni1o1/transbigdata/tree/main/docs/source/gallery
下面我们介绍如何使用TransBigData包,调用其中的函数实现对出租车GPS数据的快速处理。
首先我们引入TransBigData包,并读取数据:
import transbigdata as tbd
import pandas as pd
import geopandas as gpd
#读取数据
data = pd.read_csv('TaxiData-Sample.csv',header = None)
data.columns = ['VehicleNum','Time','Lng','Lat','OpenStatus','Speed']
data| VehicleNum | Time | Lng | Lat | OpenStatus | Speed | |
|---|---|---|---|---|---|---|
| 0 | 34745 | 20:27:43 | 113.806847 | 22.623249 | 1 | 27 |
| 1 | 34745 | 20:24:07 | 113.809898 | 22.627399 | 0 | 0 |
| 2 | 34745 | 20:24:27 | 113.809898 | 22.627399 | 0 | 0 |
| 3 | 34745 | 20:22:07 | 113.811348 | 22.628067 | 0 | 0 |
| 4 | 34745 | 20:10:06 | 113.819885 | 22.647800 | 0 | 54 |
| ... | ... | ... | ... | ... | ... | ... |
| 544994 | 28265 | 21:35:13 | 114.321503 | 22.709499 | 0 | 18 |
| 544995 | 28265 | 09:08:02 | 114.322701 | 22.681700 | 0 | 0 |
| 544996 | 28265 | 09:14:31 | 114.336700 | 22.690100 | 0 | 0 |
| 544997 | 28265 | 21:19:12 | 114.352600 | 22.728399 | 0 | 0 |
| 544998 | 28265 | 19:08:06 | 114.137703 | 22.621700 | 0 | 0 |
544999 rows × 6 columns
#读取区域信息
import geopandas as gpd
sz = gpd.read_file(r'sz/sz.shp')
sz.crs = None
sz.plot()
数据预处理
TransBigData包也集成了数据预处理的常用方法。其中,tbd.clean_outofshape方法输入数据和研究范围区域信息,筛选剔除研究范围外的数据。而tbd.clean_taxi_status方法则可以剔除的载客状态瞬间变化的记录。在使用预处理的方法时,需要传入相应的列,代码如下:
#数据预处理
#剔除研究范围外的数据
data = tbd.clean_outofshape(data, sz, col=['Lng', 'Lat'], accuracy=500)
#剔除出租车数据中载客状态瞬间变化的记录
data = tbd.clean_taxi_status(data, col=['VehicleNum', 'Time', 'OpenStatus'])数据栅格化
以栅格形式表达数据分布是最基本的表达方法。GPS数据经过栅格化后,每个数据点都含有对应的栅格信息,采用栅格表达数据的分布时,其表示的分布情况与真实情况接近。如果要使用TransBigData工具进行栅格划分,首先需要确定栅格化的参数(可以理解为定义了一个栅格坐标系),参数可以帮助我们快速进行栅格化:
#栅格化
#定义范围,获取栅格化参数
bounds = [113.6,22.4,114.8,22.9]
params = tbd.grid_params(bounds,accuracy = 500)
params(113.6, 22.4, 0.004872390756896538, 0.004496605206422906)
取得栅格化参数后,将GPS对应至栅格,由LONCOL与LATCOL两列共同指定一个栅格:
#将GPS栅格化
data['LONCOL'],data['LATCOL'] = tbd.GPS_to_grids(data['Lng'],data['Lat'],params)统计每个栅格的数据量:
#集计栅格数据量
datatest = data.groupby(['LONCOL','LATCOL'])['VehicleNum'].count().reset_index()生成栅格的地理图形,并将它转化为GeoDataFrame:
#生成栅格地理图形
datatest['geometry'] = tbd.gridid_to_polygon(datatest['LONCOL'],datatest['LATCOL'],params)
#转为GeoDataFrame
import geopandas as gpd
datatest = gpd.GeoDataFrame(datatest)绘制栅格测试是否成功:
#绘制
datatest.plot(column = 'VehicleNum')
出行OD提取与集计
使用tbd.taxigps_to_od方法,传入对应的列名,即可提取出行OD:
#从GPS数据提取OD
oddata = tbd.taxigps_to_od(data,col = ['VehicleNum','Time','Lng','Lat','OpenStatus'])
oddata| VehicleNum | stime | slon | slat | etime | elon | elat | ID | |
|---|---|---|---|---|---|---|---|---|
| 427075 | 22396 | 00:19:41 | 114.013016 | 22.664818 | 00:23:01 | 114.021400 | 22.663918 | 0 |
| 131301 | 22396 | 00:41:51 | 114.021767 | 22.640200 | 00:43:44 | 114.026070 | 22.640266 | 1 |
| 417417 | 22396 | 00:45:44 | 114.028099 | 22.645082 | 00:47:44 | 114.030380 | 22.650017 | 2 |
| 376160 | 22396 | 01:08:26 | 114.034897 | 22.616301 | 01:16:34 | 114.035614 | 22.646717 | 3 |
| 21768 | 22396 | 01:26:06 | 114.046021 | 22.641251 | 01:34:48 | 114.066048 | 22.636183 | 4 |
| ... | ... | ... | ... | ... | ... | ... | ... | ... |
| 57666 | 36805 | 22:37:42 | 114.113403 | 22.534767 | 22:48:01 | 114.114365 | 22.550632 | 5332 |
| 175519 | 36805 | 22:49:12 | 114.114365 | 22.550632 | 22:50:40 | 114.115501 | 22.557983 | 5333 |
| 212092 | 36805 | 22:52:07 | 114.115402 | 22.558083 | 23:03:27 | 114.118484 | 22.547867 | 5334 |
| 119041 | 36805 | 23:03:45 | 114.118484 | 22.547867 | 23:20:09 | 114.133286 | 22.617750 | 5335 |
| 224103 | 36805 | 23:36:19 | 114.112968 | 22.549601 | 23:43:12 | 114.089485 | 22.538918 | 5336 |
5337 rows × 8 columns
对提取出的OD进行OD的栅格集计,并生成GeoDataFrame
#栅格化OD并集计
od_gdf = tbd.odagg_grid(oddata,params)
od_gdf.plot(column = 'count')
出行OD小区集计
TransBigData包也提供了将OD直接集计到小区的方法
#OD集计到小区(在不传入栅格化参数时,直接用经纬度匹配)
od_gdf = tbd.odagg_shape(oddata,sz,round_accuracy=6)
od_gdf.plot(column = 'count')
#OD集计到小区(传入栅格化参数时,先栅格化后匹配,可加快匹配速度,数据量大时建议使用)
od_gdf = tbd.odagg_shape(oddata,sz,params = params)
od_gdf.plot(column = 'count')
基于matplotlib的地图绘制
tbd中提供了地图底图加载和比例尺指北针的功能。使用plot_map方法添加地图底图,plotscale添加比例尺和指北针:
#创建图框
import matplotlib.pyplot as plt
import plot_map
fig =plt.figure(1,(8,8),dpi=80)
ax =plt.subplot(111)
plt.sca(ax)
#添加地图底图
tbd.plot_map(plt,bounds,zoom = 12,style = 4)
#绘制colorbar
cax = plt.axes([0.05, 0.33, 0.02, 0.3])
plt.title('count')
plt.sca(ax)
#绘制OD
od_gdf.plot(ax = ax,vmax = 100,column = 'count',cax = cax,legend = True)
#绘制小区底图
sz.plot(ax = ax,edgecolor = (0,0,0,1),facecolor = (0,0,0,0.2),linewidths=0.5)
#添加比例尺和指北针
tbd.plotscale(ax,bounds = bounds,textsize = 10,compasssize = 1,accuracy = 2000,rect = [0.06,0.03],zorder = 10)
plt.axis('off')
plt.xlim(bounds[0],bounds[2])
plt.ylim(bounds[1],bounds[3])
plt.show()
出租车轨迹的提取
使用tbd.taxigps_traj_point方法,输入数据和OD数据,可以提取出轨迹点
data_deliver,data_idle = tbd.taxigps_traj_point(data,oddata,col=['VehicleNum', 'Time', 'Lng', 'Lat', 'OpenStatus'])
data_deliver| VehicleNum | Time | Lng | Lat | OpenStatus | Speed | LONCOL | LATCOL | ID | flag | |
|---|---|---|---|---|---|---|---|---|---|---|
| 427075 | 22396 | 00:19:41 | 114.013016 | 22.664818 | 1 | 63.0 | 85.0 | 59.0 | 0.0 | 1.0 |
| 427085 | 22396 | 00:19:49 | 114.014030 | 22.665483 | 1 | 55.0 | 85.0 | 59.0 | 0.0 | 1.0 |
| 416622 | 22396 | 00:21:01 | 114.018898 | 22.662500 | 1 | 1.0 | 86.0 | 58.0 | 0.0 | 1.0 |
| 427480 | 22396 | 00:21:41 | 114.019348 | 22.662300 | 1 | 7.0 | 86.0 | 58.0 | 0.0 | 1.0 |
| 416623 | 22396 | 00:22:21 | 114.020615 | 22.663366 | 1 | 0.0 | 86.0 | 59.0 | 0.0 | 1.0 |
| ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... |
| 170960 | 36805 | 23:42:31 | 114.092766 | 22.538317 | 1 | 66.0 | 101.0 | 31.0 | 5336.0 | 1.0 |
| 170958 | 36805 | 23:42:37 | 114.091721 | 22.538349 | 1 | 65.0 | 101.0 | 31.0 | 5336.0 | 1.0 |
| 170974 | 36805 | 23:42:43 | 114.090752 | 22.538300 | 1 | 60.0 | 101.0 | 31.0 | 5336.0 | 1.0 |
| 170973 | 36805 | 23:42:49 | 114.089813 | 22.538099 | 1 | 62.0 | 101.0 | 31.0 | 5336.0 | 1.0 |
| 253064 | 36805 | 23:42:55 | 114.089500 | 22.538067 | 1 | 51.0 | 100.0 | 31.0 | 5336.0 | 1.0 |
190492 rows × 10 columns
data_idle| VehicleNum | Time | Lng | Lat | OpenStatus | Speed | LONCOL | LATCOL | ID | flag | |
|---|---|---|---|---|---|---|---|---|---|---|
| 416628 | 22396 | 00:23:01 | 114.021400 | 22.663918 | 0 | 25.0 | 86.0 | 59.0 | 0.0 | 0.0 |
| 401744 | 22396 | 00:25:01 | 114.027115 | 22.662100 | 0 | 25.0 | 88.0 | 58.0 | 0.0 | 0.0 |
| 394630 | 22396 | 00:25:41 | 114.024551 | 22.659834 | 0 | 21.0 | 87.0 | 58.0 | 0.0 | 0.0 |
| 394671 | 22396 | 00:26:21 | 114.022797 | 22.658367 | 0 | 0.0 | 87.0 | 57.0 | 0.0 | 0.0 |
| 394672 | 22396 | 00:26:29 | 114.022797 | 22.658367 | 0 | 0.0 | 87.0 | 57.0 | 0.0 | 0.0 |
| ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... |
| 64411 | 36805 | 23:53:09 | 114.120354 | 22.544300 | 1 | 2.0 | 107.0 | 32.0 | 5336.0 | 0.0 |
| 64405 | 36805 | 23:53:15 | 114.120354 | 22.544300 | 1 | 1.0 | 107.0 | 32.0 | 5336.0 | 0.0 |
| 64390 | 36805 | 23:53:21 | 114.120354 | 22.544300 | 1 | 0.0 | 107.0 | 32.0 | 5336.0 | 0.0 |
| 64406 | 36805 | 23:53:27 | 114.120354 | 22.544300 | 1 | 0.0 | 107.0 | 32.0 | 5336.0 | 0.0 |
| 64393 | 36805 | 23:53:33 | 114.120354 | 22.544300 | 1 | 0.0 | 107.0 | 32.0 | 5336.0 | 0.0 |
312779 rows × 10 columns
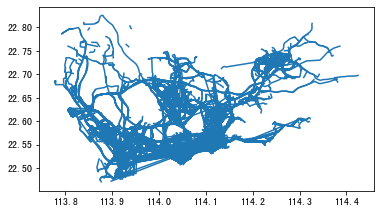
对轨迹点生成载客与空载的轨迹
traj_deliver = tbd.points_to_traj(data_deliver)
traj_deliver.plot()
traj_idle = tbd.points_to_traj(data_idle)
traj_idle.plot()
轨迹可视化
TransBigData包也依托于kepler.gl提供的可视化插件提供了一键数据整理与可视化的方法
使用此功能请先安装python的keplergl包
pip install keplergl将轨迹数据进行可视化:
tbd.visualization_trip(data_deliver)

华为开发者空间,是为全球开发者打造的专属开发空间,汇聚了华为优质开发资源及工具,致力于让每一位开发者拥有一台云主机,基于华为根生态开发、创新。
更多推荐



 23
23 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)