基于 PyTorch 的 cifar-10 图像分类
本文的主要内容是基于 PyTorch 的 cifar-10 图像分类,文中包括 cifar-10 数据集介绍、环境配置、实验代码、运行结果以及遇到的问题这几个部分,本实验采用了基本网络和VGG加深网络模型,其中VGG加深网络模型的识别准确率是要优于基本网络模型的。......
前言
本文的主要内容是基于 PyTorch 的 cifar-10 图像分类,文中包括 cifar-10 数据集介绍、环境配置、实验代码、运行结果以及遇到的问题这几个部分,本实验采用了基本网络和VGG加深网络模型,其中VGG加深网络模型的识别准确率是要优于基本网络模型的。
一、cifar-10 数据集介绍
cifar-10 数据集由 60000 张分辨率为 32x32 彩色图像组成,共分为 10 类,每类包含 6000 张图像,cifar-10 数据集有 50000 个训练图像和 10000 个测试图像。
数据集分为五个训练批次和一个测试批次,每个批次包含 10000 张图像,测试批次恰好包含从每个类中随机选择的 1000 张图像,训练批次以随机顺序包含其余图像,但某些训练批处理可能包含来自一个类的图像多于另一个类的图像,在它们之间,训练批次正好包含来自每个类的 5000 张图像。
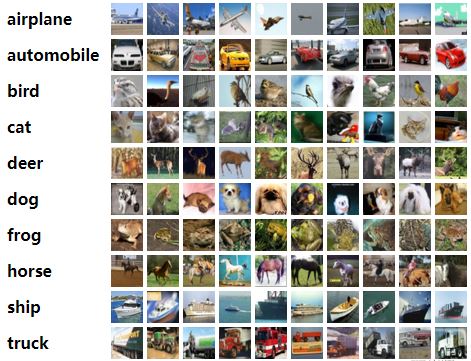
下面是数据集中所包含的类以及每个类中的 10 个随机图像。

由上图可以看到,cifar-10 数据集包含飞机、汽车、鸟、猫、鹿、狗、青蛙、马、船以及卡车这十类,这些类是完全相互排斥的,汽车和卡车之间也没有重叠,汽车包括轿车、SUV等诸如此类的东西,卡车仅包括大型卡车,但两者都不包括皮卡车。
该数据集可以在网址 https://www.cs.toronto.edu/~kriz/cifar.html 中进行下载,下载解压后包含以下几个文件。

二、环境配置
先安装 Anaconda,用来创建需要的环境,Anaconda 的安装可以参考:Anaconda 的安装及使用。
在安装好的 Anaconda 中安装 python 和 pytorch 以及代码中可能用到的包,可以参考:使用 Anaconda 安装 Pytorch。
在PyCharm中点击File——>Settings 打开如下界面,找到 Project 下的 Project interpreter ,再点击右边的齿轮,选择 Add。

在弹出的新界面中选择 Conda Environment,再选择Existing environment,在Interpreter这里找到你在 Anaconda 中 pytorch 环境下的 python 即可,然后点击OK。

可以看到,这里的 Project interpreter 已经发生了变化,点击 OK 即可。


上面两幅图中所包含的就是安装好python、pytorch以及本实验所用包后的信息了。
三、实验代码
本实验所用的代码有两个,一个是基于简单网络的,一个是基于VGG加深网络的。
1.简单网络的代码
# 声明:本代码并非自己编写,由他人提供
import torch
import torchvision
import torchvision.transforms as transforms
import ssl
from torch.autograd import Variable
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import matplotlib.pyplot as plt
import numpy as np
import time
ssl._create_default_https_context = ssl._create_unverified_context
transform = transforms.Compose(
[transforms.RandomHorizontalFlip(),
transforms.RandomGrayscale(),
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))]
)
trainset = torchvision.datasets.CIFAR10(root='./cifar10', train=True, download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=100, shuffle=True, num_workers=2)
testset = torchvision.datasets.CIFAR10(root='./cifar10', train=False, download=True, transform=transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=4, shuffle=False, num_workers=2)
classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(3, 6, 5)
self.pool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(16*5*5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self,x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = x.view(-1, 16 * 5 * 5)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
net = Net()
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(net.parameters(), lr=0.001, momentum=0.9)
def imshow(img):
img = img / 2 + 0.5
npimg = img.numpy()
plt.imshow(np.transpose(npimg, (1, 2, 0)))
plt.show()
if __name__ == '__main__':
for epoch in range(20):
timestart = time.time()
running_loss = 0.0
for i,data in enumerate(trainloader, 0):
inputs, labels = data
inputs, labels = Variable(inputs), Variable(labels)
optimizer.zero_grad()
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
running_loss += loss.item()
if i % 500 == 499:
print('[%d ,%5d] loss: %.3f' % (epoch + 1, i + 1, running_loss / 500))
running_loss = 0.0
print('epoch %d cost %3f sec' % (epoch + 1, time.time()-timestart))
print('Finished Training')
dataiter = iter(testloader)
images, labels = dataiter.__next__()
imshow(torchvision.utils.make_grid(images))
print('GroundTruth:', ' '.join('%5s' % classes[labels[j]] for j in range(4)))
outputs = net(Variable(images))
_, predicted = torch.max(outputs.data,1)
print('Predicted:', ' '.join('%5s' % classes[labels[j]] for j in range(4)))
correct = 0
total = 0
for data in testloader:
images, labels = data
outputs = net(Variable(images))
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum()
print('Accuracy of the network on the 10000 test images: %d %%' % (100*correct/total))
class_correct = list(0. for i in range(10))
class_total = list(0. for i in range(10))
for data in testloader:
images, labels = data
outputs = net(Variable(images))
_, predicted = torch.max(outputs.data, 1)
c = (predicted == labels).squeeze()
for i in range(4):
label = labels[i]
class_correct[label] += c[i]
class_total[label] += 1
for i in range(10):
print('Accuracy of %5s : %2d %%' % (classes[i], 100 * class_correct[i] / class_total[i]))
2.VGG加深网络的代码
# 声明:本代码并非自己编写,由他人提供
import torch
import torch.nn as nn
import torch.nn.functional as F
import torchvision
import torchvision.transforms as transforms
import torch.optim as optim
import time
import os
import ssl
ssl._create_default_https_context = ssl._create_unverified_context
transform = transforms.Compose(
[
transforms.RandomHorizontalFlip(),
transforms.RandomGrayscale(),
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
transform1 = transforms.Compose(
[
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
trainset = torchvision.datasets.CIFAR10(root='./cifar10_vgg', train=True, download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=100, shuffle=True, num_workers=2)
testset = torchvision.datasets.CIFAR10(root='./cifar10_vgg', train=False, download=True, transform=transform1)
testloader = torch.utils.data.DataLoader(testset, batch_size=50, shuffle=False, num_workers=2)
classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(3, 64, 3, padding=1)
self.conv2 = nn.Conv2d(64, 64, 3, padding=1)
self.pool1 = nn.MaxPool2d(2, 2)
self.bn1 = nn.BatchNorm2d(64)
self.relu1 = nn.ReLU()
self.conv3 = nn.Conv2d(64, 128, 3, padding=1)
self.conv4 = nn.Conv2d(128, 128, 3, padding=1)
self.pool2 = nn.MaxPool2d(2, 2, padding=1)
self.bn2 = nn.BatchNorm2d(128)
self.relu2 = nn.ReLU()
self.conv5 = nn.Conv2d(128, 128, 3, padding=1)
self.conv6 = nn.Conv2d(128, 128, 3, padding=1)
self.conv7 = nn.Conv2d(128, 128, 1, padding=1)
self.pool3 = nn.MaxPool2d(2, 2, padding=1)
self.bn3 = nn.BatchNorm2d(128)
self.relu3 = nn.ReLU()
self.conv8 = nn.Conv2d(128, 256, 3, padding=1)
self.conv9 = nn.Conv2d(256, 256, 3, padding=1)
self.conv10 = nn.Conv2d(256, 256, 1, padding=1)
self.pool4 = nn.MaxPool2d(2, 2, padding=1)
self.bn4 = nn.BatchNorm2d(256)
self.relu4 = nn.ReLU()
self.conv11 = nn.Conv2d(256, 512, 3, padding=1)
self.conv12 = nn.Conv2d(512, 512, 3, padding=1)
self.conv13 = nn.Conv2d(512, 512, 1, padding=1)
self.pool5 = nn.MaxPool2d(2, 2, padding=1)
self.bn5 = nn.BatchNorm2d(512)
self.relu5 = nn.ReLU()
self.fc14 = nn.Linear(512 * 4 * 4, 1024)
self.drop1 = nn.Dropout2d()
self.fc15 = nn.Linear(1024, 1024)
self.drop2 = nn.Dropout2d()
self.fc16 = nn.Linear(1024, 10)
def forward(self, x):
x = self.conv1(x)
x = self.conv2(x)
x = self.pool1(x)
x = self.bn1(x)
x = self.relu1(x)
x = self.conv3(x)
x = self.conv4(x)
x = self.pool2(x)
x = self.bn2(x)
x = self.relu2(x)
x = self.conv5(x)
x = self.conv6(x)
x = self.conv7(x)
x = self.pool3(x)
x = self.bn3(x)
x = self.relu3(x)
x = self.conv8(x)
x = self.conv9(x)
x = self.conv10(x)
x = self.pool4(x)
x = self.bn4(x)
x = self.relu4(x)
x = self.conv11(x)
x = self.conv12(x)
x = self.conv13(x)
x = self.pool5(x)
x = self.bn5(x)
x = self.relu5(x)
# print(" x shape ",x.size())
x = x.view(-1, 512 * 4 * 4)
x = F.relu(self.fc14(x))
x = self.drop1(x)
x = F.relu(self.fc15(x))
x = self.drop2(x)
x = self.fc16(x)
return x
def train_sgd(self, device):
optimizer = optim.SGD(self.parameters(), lr=0.01)
path = 'weights.tar'
initepoch = 0
if os.path.exists(path) is not True:
loss = nn.CrossEntropyLoss()
else:
checkpoint = torch.load(path)
self.load_state_dict(checkpoint['model_state_dict'])
optimizer.load_state_dict(checkpoint['optimizer_state_dict'])
initepoch = checkpoint['epoch']
loss = checkpoint['loss']
for epoch in range(initepoch, 20): # loop over the dataset multiple times
timestart = time.time()
running_loss = 0.0
total = 0
correct = 0
for i, data in enumerate(trainloader, 0):
# get the inputs
inputs, labels = data
inputs, labels = inputs.to(device), labels.to(device)
optimizer.zero_grad()
outputs = self(inputs)
l = loss(outputs, labels)
l.backward()
optimizer.step()
running_loss += l.item()
if i % 500 == 499:
print('[%d, %5d] loss: %.4f' %
(epoch, i, running_loss / 500))
running_loss = 0.0
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy of the network on the %d tran images: %.3f %%' % (total,
100.0 * correct / total))
total = 0
correct = 0
torch.save({'epoch': epoch,
'model_state_dict': net.state_dict(),
'optimizer_state_dict': optimizer.state_dict(),
'loss': loss
}, path)
print('epoch %d cost %3f sec' % (epoch, time.time() - timestart))
print('Finished Training')
def test(self, device):
correct = 0
total = 0
with torch.no_grad():
for data in testloader:
images, labels = data
images, labels = images.to(device), labels.to(device)
outputs = self(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy of the network on the 10000 test images: %.3f %%' % (100.0 * correct / total))
def classify(self, device):
class_correct = list(0. for i in range(10))
class_total = list(0. for i in range(10))
for data in testloader:
images, labels = data
images, labels = images.to(device), labels.to(device)
outputs = self(images)
_, predicted = torch.max(outputs.data, 1)
c = (predicted == labels).squeeze()
for i in range(4):
label = labels[i]
class_correct[label] += c[i]
class_total[label] += 1
for i in range(10):
print('Accuracy of %5s : %2d %%' % (classes[i], 100 * class_correct[i] / class_total[i]))
if __name__ == '__main__':
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
net = Net()
net = net.to(device)
net.train_sgd(device)
net.test(device)
net.classify(device)
四、运行结果
基于简单网络的代码运行过程如下。
代码运行后开始在cifar10的官网下载数据集 cifar-10-python.tar.gz 的压缩包。

下载成功后接着运行了20个epoch。

20个epoch运行完成后弹出了该图,可以看到画面是比较模糊的。

关闭该图后接着输出了各类识别的准确率。

基于VGG加深网络的代码运行过程如下,整个过程相当耗时。

最终输出各类识别的准确率。

绘制图对比一下,基于VGG加深网络的整体识别效果要比简单网络好很多。

五、遇到的问题
original error was: dll load failed: 找不到指定的模块。
这个问题在网上有好多的解决办法,我自己做了好多尝试,最后不知道是具体的哪一步起了作用,就可以运行程序了,总之将我尝试的方法都贴在下面吧,希望能够帮到你!
1、在Anaconda下安装python3.6版本(之前装了3.7和3.8都不太好使,有可能也不是版本的问题)。
2、先安装 matplotlib,再安装 pytorch(本实验用到了 matplotlib,我先安装的这一个)。
3、尝试过卸载 numpy 再重新安装(好多人通过这个方法解决了)。
4、卸载了电脑之前已安装的 python ,删除了其对应的环境变量(可能会与Anaconda下的python互相影响)。
5、配置 Anaconda 下的 python 环境变量。

上面的环境变量按照自己的安装路径配置。
6、在 PyCharm 下的Settings中把所有可以改变 Project Interpreter 的地方(下图左侧框住的这四个)都改为Anaconda 下的 python路径并保存。

7、看看自己存放 python 模块的文件夹下是否有之前版本 python 的文件,我这里就有一个名为_pycache_的文件夹,删除它。
总结
以上就是cifar-10图像分类的所有内容了,我在搭建环境上花费的时间比运行程序本身的时间都要长,所以在这个过程中遇到问题时要耐心一点,相信你也可以解决问题,让代码成功的跑起来!
参考网址:
Alex Krizhevsky的主页
https://www.kaggle.com/c/cifar-10

为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐



 36
36 3
3- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)