我的ubuntu系统配置-双系统重装到完整配置ubuntu18.04环境的完整流程-install
完整介绍、记录了我自己常用的ubuntu系统基本环境的安装与配置
文章目录
// 在电脑上任何操作都看清楚了再点,特别是删除操作!
// 整理了很多网上的教程,侵权请联系删除!
注意事项:
- 在电脑上任何操作都看清楚了再点,特别是删除操作!
- 写入系统镜像后的U盘,最好不能再动里面的任何东西,否则文件系统很可能出现问题!安装会失败!
- 一定要在软件更新里关掉update选项卡的更新!
1 删除ubuntu
1.1 在Windows下删除ubuntu所在的磁盘分区
右键计算机->管理->磁盘管理,打开磁盘管理器后可以看到磁盘分区信息如下图所示(根据个人分区方式会有所不同):

这里原先的Win10和Ubuntu都安装磁盘0下,前三个分区为win10分区,其中黄色方框内的分区是win10 EFI启动引导分区,后四个分区是ubuntu分区,分别对应swap分区、/boot分区、/分区和/home分区。
在重新安装ubuntu18.04之前我们需要删除原先Ubuntu的EFI分区及启动引导项,这里推荐直接使用windows下的diskpart来删除。
- 首先
键盘输入【win】+【R】,输入【diskpart】。在diskpart界面下,输入【list disk】查询当前磁盘信息。
这里我们原先的Ubuntu装在磁盘0下,所以选择磁盘0,输入【select disk 0】。然后查看磁盘0下所有分区信息【list partition】。

可以看出,分区1-3是windows系统分区,分区4-7是Ubuntu系统分区(Type = Unknown),这里我们仅将Ubuntu系统分区删除。选择分区4【select partition 4】,删除该分区【delete partition override】,删除后在磁盘管理器中可以发现多出了一块7G的未分配空间。同样的,依次删除分区5-7。
// Warning!!!:一定要根据自己的实际情况进行删除!!!

最后,在磁盘管理器中可发现原先Ubuntu的分区4-7已经全部合并成一块未分配空间,该未分配空间用于重新安装Ubuntu系统。
1.2 删除Win10 EFI启动分区中的Ubuntu启动引导项
如果在第一步结束后,直接开机按ESC或F12进入启动选项菜单时会发现仍然还有Ubuntu启动项,如下图所示:
这是因为在安装Ubuntu后,Ubuntu的引导信息也写在了win10的EFI启动分区里。如果不删除的话,以后再安装Ubuntu会出现很多个Ubuntu启动项。
由于在win10下因为没有盘符,我们无法访问win10的EFI启动引导分区。因此,这里我们还是利用diskpart来操作,首先进入磁盘0为EFI分区分配盘符。
操作如下:
1. 输入【Win】+【R】,输入【diskpart】打开diskpart;
2. 输入【list disk】,显示磁盘列表
3. 输入【select disk 0】,选择磁盘,即win10系统所在磁盘;
4. 输入【list partition】,查看磁盘0的分区列表;
5. 输入【select partition 1】,选择wind10启动引导项所在分区(即Type=System,容量一般较小为100M的那一个分区);
6. 为win10的EFI启动引导项所在分区分配盘符,输入【assign letter = p】,这里p为盘符名称,字母A~Z应该都可以,注意不要和已有盘符名重复即可;
此时,查看win10磁盘会发现多出一个P盘,就是我们刚刚分配的win10启动引导项分区
由于权限不够,此时无法直接打开该盘符。这里先用管理员权限打开记事本,然后通过记事本菜单栏里的【打开】来访问P盘,会发现P盘里有个EFI文件夹,打开EFI文件夹。这里直接删除ubuntu文件夹就可以了。
此时,再回到diskpart删除刚刚分配的盘符P,输入【remove letter = p】即可
2 制作ubuntu系统镜像
2.0 Preparation
- 一个4G左右大小的闲置U盘
- 确定自己电脑的类型
a类: MBR的bios + 单硬盘
b类: MBR的bios + 双硬盘(SSD固态 + 机械硬盘)
c类: UEFI的bios + 单硬盘
d类: UEFI的bios + 双硬盘(SSD固态 + 机械硬盘) - 安装UltralSO 软碟通,将 Ubuntu 的镜像写入U盘
2.1 准备U盘
此U盘最好是一个空U盘, 因为在安装过程中U盘会被格式化(完全被镜像内容覆盖)
2.2 确定自己电脑的类型
- 看自己电脑是MBR还是UEFI
键盘按下win+r(win:开始键/也就是Windows的标志那个键),在输入框内输入msinfo32 后,回车确认

出现以下信息:

- 确定自己电脑 硬盘 的类型:
在显示屏下方的搜索框内搜索“计算机管理”

点击进入后,再点击左边列表内的“磁盘管理”,就可以查看自己的电脑的硬盘类型

针对之前说过的a,b,c,d四种情况,每一种类别的安装方法都有区别,必须按自己电脑对应的类型,选择对应的安装方式,不然会导致失败,甚至会损坏原有的Windows操作系统。
如果有可能,大家装新系统前尽量备份自己的重要数据,不过还是要以防万一。只要细心大胆,一切都是可完成的!
再次提醒,先弄清电脑的类型,再选择安装方法
2.3 安装Ubuntu镜像
先下载ubuntu:输入ubuntu官网的网址,在最上方找到Download内点击版本 某个版本的 LTS下载
新版ubuntu下载:https://ubuntu.com/download#download
旧版ubuntu下载:http://old-releases.ubuntu.com/releases/

2.4 为新系统分配硬件存储空间
- 再次像之前一样,在显示屏下方的搜索框内搜索“计算机管理”, 选择“磁盘管理”
- 选择最后一个磁盘空间的磁盘,比如 C一个盘的最后一个盘就是C盘,C、D两个盘的最后一个盘是D盘(CDE盘的最后一个E盘,CDEF盘的最后一个盘F盘,以此类推),鼠标右键点击该磁盘,选择压缩卷:
a类: MBR的bios + 单硬盘
c类: UEFI的bios + 单硬盘可以直接按照以下方法分盘

- 并根据需要选择需要压缩/分给新操作系统的硬盘大小,一般至少分配50个G(1G = 1024MB)。如果大小不够就腾一些空间,保证最后一个盘有40~50G的空余空间吧,如果空间足够,建议分配的硬盘大小越多越好,年轻人请注意:讲武德,点到为止,不要大E=

设置好分配的硬盘大小后,点击“压缩”
压缩后,会发现多出一块未分区磁盘(黑色分区),如果选择的压缩大小是50G, 则黑色部分为50G可用空间。
b类: MBR的bios + 双硬盘(SSD固态 + 机械硬盘)
d类: UEFI的bios + 双硬盘(SSD固态 + 机械硬盘)
和a类,c类,单硬盘的分盘方法基本一样,唯一差别:一开始分区时,在SSD(也就是windows的C盘)分200M的空间来安装启动项,在机械硬盘分50G左右(可以更大,只要磁盘容量充足),SSD分的200M的空间之后会放efi,其他的就放在另外的50G里面。除分盘外,其他部分就完全一样了。

2.5 用UltralSO软碟通,将 Ubuntu 的镜像写入 U盘
- 安装并打开UltralSO
- UltralSO是收费注册的,但是我们只是短期使用一下,所以可以点击“试用”,无需购买收费的注册码
- 进入UltralSO,点击“选择文件”,并打开你已经下载的 ubuntu 所在的目录/位置,选择 ubuntu 镜像(改成自己的Ubuntu镜像),点击打开:


- 在UltralSO上方的菜单栏点击“启动”,再点击“写入硬盘映像”:

- 根据出现的界面,检查信息

1) 硬盘驱动器,必须对应使用的 U盘 (一般默认是)
2) 映像文件,必须对应下载的 ubuntu 镜像
3) 若没有错误,点击“格式化” // 如果是已经用u盘制作了驱动盘,格式化的按键可能是灰色的,可以在Windows磁盘管理器中进行格式化
4) 在 U盘格式化完毕之后,点击“写入”,再等待10分钟左右,写入完毕
2.6 使用U盘,安装新系统
不同厂商/牌子的计算机(Dell,Lenovo,HUAWEI…) BOOT 启动的快捷键不相同,可以自行百度,自己的计算机如何进入BOOT界面,也就是进bios。大多情况下是按“F2”
- 重启电脑,在开机进bios,在boot manager里关闭secure boot,(有些secure boot在另外的位置,找不到可以摸索、搜索一下)
Secure BOOT设计之初作用是防止恶意软件侵入。事实上它能够做到的仅仅是,当电脑引导器被病毒修改之后,它会给出提醒并拒绝启动,避免可能带来的进一步损失。更多的人认为,这是微软为了防止安装Windows操作系统的电脑改装linux。客观的讲,微软设计Secure Boot的原本用意可能是出于保证系统安全,但结果似乎成了PC厂商保护市场垄断、阻碍竞争的一种手段。

- 然后将第一启动选择,从Windows改为USB,之后就进入 unbuntu 安装界面
- 选择右边语言,我建议你直接用English作为系统语言,不然很多文件名在命令行里不方便打出

- 安装 ubuntu时,不要连网,尤其不要将下图中的安装第三方软件的选项打✓ !

- 接下来推荐选择“其他选项”,可以自行分盘。// 若选择“直接安装”,默认之前分配的50G空间为单独一个“大盘”

- 接下来,会找到一个较大的空闲分区,也就是我们之前在Windows系统中,创建的那个分区

关于 Linux 的分区:
a.首先 Linux分区和 Windows分区是不同,Linux 是以文件形式作为分区
b.所以分区就像划分磁盘大小一样, 在这里假设你划分的空盘分区为 60G,点击预留的空闲盘符,进行分区,分区方式:
a类:MBR的bios + 单硬盘
b类:MBR的bios + 双硬盘(SSD固态 + 机械硬盘)
1)/boot:这个就是实现你双系统的原因了,这个就是用于启动 ubuntu 的目录,里面会有系统的引导,这个文件只有几十MB,但建议将其划分为 200M,文件格式为 ext4,这个分区必不可少!
c类:UEFI的bios + 单硬盘
d类:UEFI的bios + 双硬盘(SSD固态 + 机械硬盘)
1) efi:这个就是实现你双系统的原因了,这个就是用启动 ubuntu 的目录,里面会有系统的引导,这个文件其实只有几十MB,但建议将其划分为 200M,文件格式为 efi,这个分区必不可少,否则后果你懂得!
MBR和UEFI的区别,各自使用 /boot 和 efi
接下来的几步,两种电脑类型的安装方式,又再次相同
2)swap: 这是 Linux 也就是 ubuntu 的交换区目录,大小一般为内存的 2 倍,在电脑内存不足时,系统调用这片区域,来运行程序。可以将其分为4~8G,文件格式为交换空间,英文swap
3)/: 这是 Linux 也就是 ubuntu 的根目录,就是一个反斜杠,相当于Windows的C盘,我们将其分为10~20G,文件格式为 ext4,条件允许可以再大,毕竟ubuntu装软件,默认装在这里 (我的推荐是再分多一点,分到和home目录差不多大)
4)/home: 这是 ubuntu 的“其他盘”, 或者说是个人目录,相当于Windows的DEF盘,为了让个人目录大一些,将剩下的存储空间全分给它,文件格式为 ext4

- 依然在这个界面上,选择“安装启动下拉菜单”,刚刚第1)步创建了“/boot” 或“efi” 文件,现在看看这个区前面的编号是多少,安装启动引导器的设备,也就选“/boot” 或“efi” 文件,对应的编号
然后在“安装启动下拉菜单”中找到对应编号,如下图都为/dev/sbd2(“/boot” 或“efi”,图中的例子是efi)

- 安装继续,设置地区,键盘布局,用户名、密码设置…


- 注意:
密码最好只设置一个字符 ‘;’,在linux上学习很方便!

- 最后等待安装成功

- 全部完成之后,新系统会提醒你重启,把U盘拔了,点击重启。之后每次开机,就可以根据自身需求,选择进入的操作系统

2.7 配置ubuntu相关设置
- 开启夜间护眼模式: Settings -> Devices -> Display -> Night Light
- 调节系统的亮度(如果显卡驱动没问题的话)
- 设置root 密码
sudo passwd root// 建议设置成 ;
3 独立显卡相关的问题
/*
nvidia的显卡驱动在linux上经常被诟病,而且我这款电脑天选2恰好不支持独显直连。ubuntu18的Nvidia独立显卡相关的问题自己怎么折腾都没有得到解决!已经放弃折腾它了……
*/
我的环境:
- Nvidia RTX 3060
- ubuntu20.04 desktop
- 天选2,AMD64 R9 5900HX
3.1 尝试过的方案(失败)
我的环境:
- nvidia geforce RTX 3060
- 天选2,AMD64 R9 5900HX
- ubuntu18.04
尝试过的方案:
- 在软件更新器中选用addtion drivers 》apply 》reboot // 已经试过了 470 510 515
- nvidia官网上下载对应的.run驱动,本地安装
- 通过添加ppa库,然后sudo apt-get install nvidia-drivers …
3.2 安装驱动时黑屏
1、重启后在系统选择界面上选第二个——ubuntu 高级选项
2、进去以后选择一个括号里面带recovery mode的选项
3、然后它自动黑屏出现代码,然后弹出一个选择框,选择root
4、接着在屏幕下部分可以看到命令行,按回车进入到自己的用户名下
5、输入命令卸载安装的nvidia驱动
sudo apt-get remove --purge nvidia*
sudo reboot
6、重启电脑,就正常了,然后乖乖地再换回驱动。
4 无线网卡相关问题
Ubuntu系统中找不到网络适配器,连不了wifi
环境:
- 无线网卡 MediaTek Wi-Fi 6 MT7921 Wireless LAN Card
- ubuntu 18.04 LTS
4.1 reason
/*
该段注释的原文链接[https://blog.csdn.net/weixin_39278265/article/details/86604677]
我想从两个方面讲原因:
1)明明自己的台式机(或者笔记本)有无线网卡硬件,但是ubuntu却搜不到无线网络(wifi)的原因:
原因就是当前的开源系统Ubuntu对硬件的支持还不太好。所以Ubuntu系统在安装的时候,不会自动给电脑装上无线网卡驱动。
2)明明自己已经在网上找了各种解决方案,但是还是无法成功解决无线网卡驱动安装的问题,也没办法让自己的ubuntu 系统搜索到无线网络:
原因就是ubuntu是国外主导开发的,其QA问答社区(叫做ask Ubuntu,网址在:https://askubuntu.com/ )是英文社区。如果仅仅只是想在中文网站上找到答案,真的很难。
此外,当前的中文网站(不包括这篇文章)给出的解决方案有几个缺点:
含糊不清。往往还没说清楚自己的无线网卡是什么型号的(网卡型号很重要,不同的无线网卡硬件型号对应不同的无线网卡驱动),就直接给出解决方案,这样的话普适性是不强的,而且容易误导他人。
*/
4.2 solution
/*
首先,要查清楚电脑是否有无线网卡,如果有,是什么型号
只有先查到自己的电脑的无线网卡型号,才能“对症下药”
要查明型号,可以参考
我使用的命令是:
lspci -nnk | grep -iA2 net
这时候会出现类似如下的信息:
02:00.0 Ethernet controller [0200]: Realtek Semiconductor Co., Ltd. RTL8111/8168/8411 PCI Express Gigabit Ethernet Controller [10ec:8168] (rev 15)
Subsystem: Acer Incorporated [ALI] Device [1025:098a]
Kernel driver in use: r8169
03:00.0 Network controller [0280]: Qualcomm Atheros Device [168c:0042] (rev 30)
Subsystem: Foxconn International, Inc. Device [105b:e09a]
Kernel driver in use: ath10k_pci
其中 Ethernet Controller表明你的电脑有以太网卡,Network controller表明你的电脑有无线网卡。
我在我的Ubuntu系统上运行
lspci -nnk | grep -iA2 net 的输出中找到了如下信息:
Qualcomm Atheros Device [168c:0042] (rev 31)
这个即表明了我电脑的无线网卡型号是高通的 [168c:0042] (rev 31) 型号。
明确网卡型号之后,开始下载驱动。
其次,根据网卡型号下载对应的驱动,并安装
*/
我显示的无限网卡:
Network controller [0280]: MEDIATEK Corp. Device [14c3:7961]
Subsystem: AzureWave Device [1a3b:4680]
04:00.0 Non-Volatile memory controller [0108]: Samsung Electronics Co Ltd Device [144d:a809]
4.3 solution1(failed)
通过设置ubuntu下的software & updates
这是中文论坛中最常见的解决方案之一,就是不断地换源,更新,找附加驱动项,以此来安装无限网卡驱动。
很不幸,我这个联发科的无线网卡驱动,需要自己找
4.4 solution2(failed)
通过以下命令,也是想更新网卡驱动
sudo apt-get update
sudo apt-get install bcmwl-kernel-source
4.5 solution3(successful)
参考链接:https://blog.csdn.net/qq_39533374/article/details/122208472
换一个无线网卡或者外接一个usb网卡(这可比折腾ubuntu快多了……)
// 有人已经给出了一些适用于联发科技 MT7xxx 系列的 mac80211 无线驱动程序(但是我没有尝试)
5 解决ubuntu字体过小的问题
这是因为屏幕分辨率太高了,导致整个系统字体看起来过小。
- 更新一下软件源
sudo apt-get update
- 安装gnome-tweaks桌面配置工具。
sudo apt install gnome-tweaks
- 安装完成后,在终端输入下面命令,弹出优化窗口
gnome-tweaks
设置缩放比例,调节所有字体缩放的倍数,自己根据自己的电脑分辨率定。// 我自己调整到了1.5倍

6 ubuntu安装ibus中文输入法
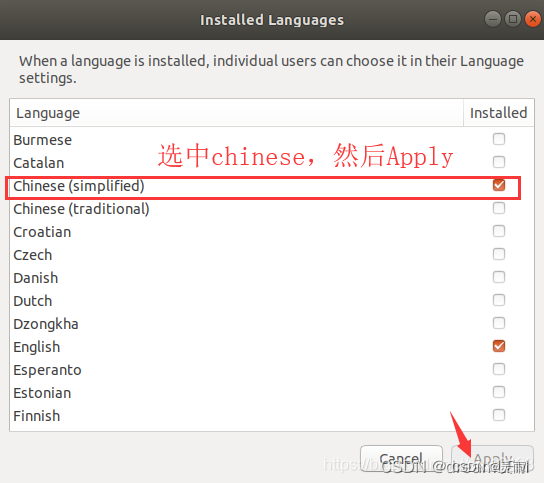
- 先在系统中添加中文语言包


- 安装ibus输入框架
sudo apt-get install ibus ibus-pinyin
- 配置输入方式
sudo ibus-setup
在 Iput Methods 选项卡中选择 Add 添加需要的输入法,// 我添加的是 Intelligent Pinyin
- 重启!!!
sudo reboot
在系统设置中添加中文输入法
切换输入方式
super+space // 即windows键+空格键
7 配置Firefox Browser
我的评价是firefox不如 google chrome……
- Download the suitable the .deb file
https://www.google.com/chrome/
-
Run the command
sudo dpkg -i xxx.deb -
开启chrome的google账号同步
8 配置Net-work tools
9 安装ROS
鱼香ROS的一键安装脚本:https://github.com/fishros/install
使用方法:wget http://fishros.com/install -O fishros && . fishros
// 用这个脚本来安装和配置真的非常方便!强烈推荐!如果用了脚本,下面的内容可以略过
选择合适的版本,按照ros官方教程一步步来 https://wiki.ros.org/ROS/Installation (记得换源,这会快很多)
换ustc源的命令:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
9.1 rosdep update
唯一需要注意的是这个!
采用以下脚本直接通过清华的镜像进行rosdep update!
update_rosdep_tsinghua.sh
#!/bin/bash
#run mkdir
sudo mkdir -p /etc/ros/rosdep/sources.list.d/
#run curl
sudo curl -o /etc/ros/rosdep/sources.list.d/20-default.list https://mirrors.tuna.tsinghua.edu.cn/github-raw/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
#run export
export ROSDISTRO_INDEX_URL=https://mirrors.tuna.tsinghua.edu.cn/rosdistro/index-v4.yaml
#run bashrc
echo 'export ROSDISTRO_INDEX_URL=https://mirrors.tuna.tsinghua.edu.cn/rosdistro/index-v4.yaml' >> ~/.bashrc
#run rosdep update
rosdep update
• sudo chmod +x update_rosdep_tsinghua.sh
• ./update_rosdep_tsinghua.sh
// 现在推荐用脚本来进行rosdep update,如果使用了脚本,就不用看下面的内容了
我的解决方案:
- 选择使用快一点的proxy node (这在PC端有时候好使)
// 记住,最好一步步,清楚地来,否则总是出现很多玄学的错误!!!
- 将update的url改为自己的gitee仓库(这适合不方便开proxy的)
在安装ROS的过程中,很多同学在执行上述指令时会提示以下错误:
ERROR: cannot download default sources list from:https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.listWebsite may be down.
博主的思路是新思路:将相关资源备份到 gitee,修改 rosdep 源码,重新定位资源。成功率是百分百。
// 我自己将这位老哥的Gitee仓库clone到了自己的Gitee仓库中,下文中所有的 lingyu-i (原来是wybros)
// 我的Gitee对应仓库:https://gitee.com/lingyu-i/rosdistro
- 步骤1
进入到 sources.list.d 文件夹(如果没有,则用mkdir指令新建)
sudo mkdir -p /etc/ros/rosdep/sources.list.d
修改 gedit 20-default.list
cd /etc/ros/rosdep/sources.list.d
sudo nano 20-default.list
// 可以将gedit 换成其他编辑器 vim、nano等
将里面所有的
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/lingyu-i/rosdistro/raw/master
修改前:
# os-specific listings first
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml osx
# generic
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
gbpdistro https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead
修改后:
# os-specific listings first rosdep update
yaml https://gitee.com/lingyu-i/rosdistro/raw/master/rosdep/osx-homebrew.yaml osx
# generic
yaml https://gitee.com/lingyu-i/rosdistro/raw/master/rosdep/base.yaml
yaml https://gitee.com/lingyu-i/rosdistro/raw/master/rosdep/python.yaml
yaml https://gitee.com/lingyu-i/rosdistro/raw/master/rosdep/ruby.yaml
gbpdistro https://gitee.com/lingyu-i/rosdistro/raw/master/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead
- 步骤2
进入到 rosdep2 文件夹,
修改 gbpdistro_support.py
cd /usr/lib/python2.7/dist-packages/rosdep2/
sudo nano gbpdistro\_support.py
将里面所有的
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/lingyu-i/rosdistro/raw/master
修改后如下
FUERTE_GBPDISTRO_URL = ‘https://gitee.com/lingyu-i/rosdistro/raw/’ \
‘master/releases/fuerte.yaml’
- 步骤3
进入到 rosdep2 文件夹,
修改 rep3.py
cd /usr/lib/python2.7/dist-packages/rosdep2/
sudo nano rep3.py
将里面所有的
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/lingyu-i/rosdistro/raw/master
修改后如下
REP3_TARGETS_URL = ‘https://gitee.com/lingyu-i/rosdistro/raw/master/releases/targets.yaml’
- 步骤4
进入到 rosdep2 文件夹,
修改 sources_list.py
cd /usr/lib/python2.7/dist-packages/rosdep2/
sudo nano sources\_list.py
将里面所有的
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/lingyu-i/rosdistro/raw/master
修改后如下
DEFAULT_SOURCES_LIST_URL = ‘https://gitee.com/lingyu-i/rosdistro/raw/master/rosdep/sources.list.d/20-default.list’
- 步骤5
进入到 rosdistro 文件夹
修改 __init__.py
cd /usr/lib/python2.7/dist-packages/rosdistro/
sudo nano \_\_init\_\_.py
将里面所有的
raw.githubusercontent.com/ros/rosdistro/master
替换成
gitee.com/lingyu-i/rosdistro/raw/master
修改后如下
DEFAULT_INDEX_URL = ‘https://gitee.com/lingyu-i/rosdistro/raw/master/index-v4.yaml’
- 最后
打开新终端执行
rosdep update
如果出现如下提示则表示成功!

10 配置开发相关工具
10.1 配置VS CODE
- Download
https://code.visualstudio.com/download
- Install
Command:
sudo dpkg -i <The .deb file name of software>
- Add to Favorites
- Download plugins (按需选取)(其实开启 VS Code 的账号同步就行了)
- C/C++
- python
- ROS
- CMake Tools
- Remote - SSH
10.2 Install terminator
- Download
Command: sudo apt install terminator
11 Install systemback
// 同样可以重置ubuntu系统的工具有 Resetter,但是不推荐这个,因为改不了一个字符的密码,并且没安装任何环境
// 值得一提的是,打开该软件时,它会占用apt进程,导致apt命令的失败
// 令我不了解的是,它只能备份、恢复系统文件、系统的状态,我的用户liyui下home目录下的文件夹不会被备份、恢复
尽管其备份了整个系统的所有文件(不包括用户个人目录下的文件),但其大小也有10G+!空间不大的话,备份一个最基本的就好
// 我备份的是刚安装完 ros-melodic、vscode…等最基本的开发环境配置
11.1 Systemback功能
Systemback包括以下功能:
- 创建系统还原点date-wise
- 将系统还原到任何还原点
- 复制当前系统状态
- 系统安装
- 创建一个实时系统
- 修复故障系统
- 处理系统升级
11.2 安装Systemback
Install systemback in Ubuntu20.04
sudo sh -c 'echo "deb [arch=amd64] http://mirrors.bwbot.org/ stable main" > /etc/apt/sources.list.d/systemback.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key 50B2C005A67B264F
sudo apt-get update
sudo apt-get install systemback
请按照以下步骤在Ubuntu 18.04 LTS中安装Systemback:
- 然后通过在终端中运行以下命令来导入此PPA的GPG签名密钥:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys 382003C2C8B7B4AB813E915B14E4942973C62A1B

- 要安装Systemback,我们首先需要添加其PPA。按Ctrl + Alt + T启动终端,然后键入以下命令:
sudo add-apt-repository "deb http://ppa.launchpad.net/nemh/systemback/ubuntu xenial main"
// 你没看错,就是 xenial,照着复制粘贴就行

- 添加PPA后,通过在Terminal中运行以下命令来更新本地apt存储库:
sudo apt update

- 在终端中运行以下命令以安装systemback
sudo apt install systemback
等待一段时间,直到安装完成。
- 安装完成后,您可以从Ubuntu dash菜单启动它,也可以在终端中以sudo键入以下命令以启动Systemback。
sudo systemback
// 弹出来的GUI会很小,可以点击弹出的界面左上角,调整放大倍率(我的是x1.5)
11.3 通过GUI使用Systemback
以下是Ubuntu中Systemback应用程序的默认视图。应用程序分为以下几节。
- 还原点–包含还原点列表,其中最新的位于顶部
- 突出显示的还原点-包含标记为重要的还原点的列表
- 点操作–创建,突出显示,重命名或删除还原点
- 存储目录–还原点的存储位置。用于存储备份的Systemback的默认存储目录是 /home。
- 功能菜单–包含各种选项,例如系统复制,还原,安装,实时系统创建,系统修复,系统升级和排除。

- 创建一个还原点
要创建还原点,请单击创建新的在下面点操作部分。它将开始在默认目录下创建系统的备份**/家**。但是,您可以从以下位置更改其位置储存目录部分。如果需要,您还可以通过单击以下选项从备份中排除一些配置文件:排除在下面**功能菜单**。

完成上述步骤后,将出现一个对话框,显示该过程的进度。

上述过程可能需要一段时间,具体取决于您的系统。备份完成后,您会在[恢复点部分。备份的名称将反映创建日期。
- 将Ubuntu恢复到以前的状态
创建还原点后,您可以轻松地将Ubuntu恢复到以前的状态。要将Ubuntu恢复到以前的状态,请执行以下步骤:
1.如果您有多个还原点,请使用相应字段右侧的复选框选择。仅选择一个还原点。
2.然后点击系统还原下的选项功能菜单部分。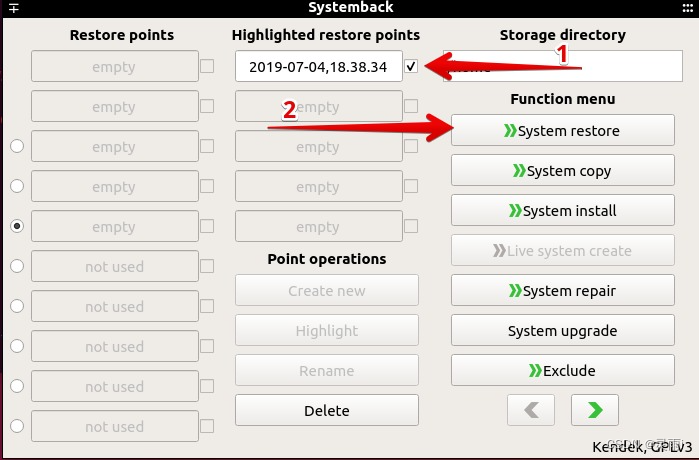
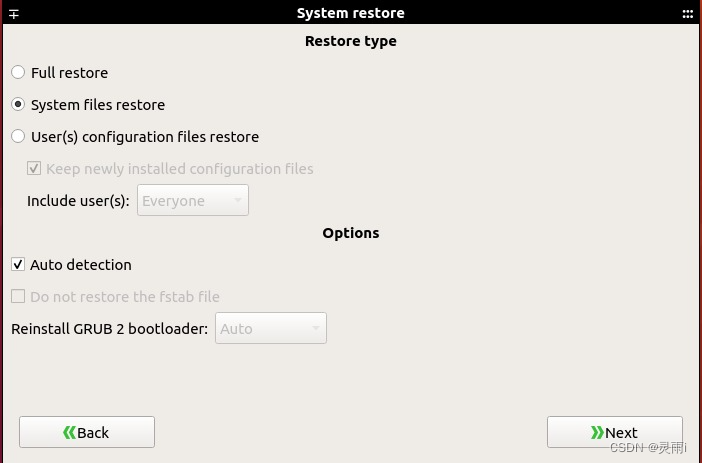
3。系统还原窗口将会出现。选择还原类型。您可以选择完全还原该选项将还原完整备份。另外,您也可以使用系统档案从中还原或只是配置文件用户配置文件还原选项。
选择还原类型后,单击下一个。
4.提示确认,点击开始。它将开始还原过程。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-7t05JRXW-1660832951146)(images/3yfJLIYTETGoyzStihI6mAmAR68AP4zuegJqaCzmPZs.jpeg)]](https://img-blog.csdnimg.cn/129d80029b1e460cbecb3bc24aa1589a.png)
5.以上过程完成后,重新启动系统。重新引导后,您的系统将处于以前的状态。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-bs4NCixJ-1660832951146)(images/HnPYZCWvs7ZPq9e5ZxP5X3jhkCP3Z5feNO_f1vDYvEc.jpeg)]](https://img-blog.csdnimg.cn/c0083c17ec854004aab1d04c464f679d.png)
11.4 通过命令行使用Systemback
我们也可以只使用命令行来运行Systemback。
- 要以命令行模式启动Systemback,请在终端中运行以下命令:
sudo systemback-cli
您将看到以下CLI。在主屏幕上,它将列出可用的还原点(如果有)。
- 选择一个还原点。使用相应还原点左侧的字母将其选中。例如,在我们的案例中,我们将按B.
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-rprbgqOz-1660832951147)(images/YfyPA1pAyK74yCQpG1aLBDv9dmEzXJX_mzpDAyL2rRw.jpeg)]](https://img-blog.csdnimg.cn/3b32b9f5b75b4c7983eb82eebbbbb54c.png)
- 现在它将显示所选的还原点。在下面,您将看到三个选项。为了删除还原点,请按1,恢复按2,然后B返回主菜单;当我们要还原时,我们将按2。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-gAK4SHk6-1660832951148)(images/z07ZTI8Mc6rUu5Rubidxn4Undtm81HImpUoIDZgNnbU.jpeg)]](https://img-blog.csdnimg.cn/20a1d90dfc414a15bf61c6c87912c907.png)
- 然后从可用选项中选择还原类型完全还原, 系统文件还原或者用户配置文件还原。例如,我们只想还原系统文件,我们将按2到选择系统文件还原选项。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-irekCD9a-1660832951148)(images/gK-7vNlxByAzVFTq-FJwOy78k4g55kNDd7_USAD-XLo.jpeg)]](https://img-blog.csdnimg.cn/c6ecd4fe22c44975a74a59de83985269.png)
- 接下来,它将询问您是否要保留当前的fstab文件并重新安装GRUB 2引导加载程序。按ÿ要么ñ键,是或否。最后按ÿ用于启动还原过程。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-54wdXr4q-1660832951148)(images/nCiOTggC35HxV1Ufg3t7d_lf78JKTETcJNzzGBEp8pk.jpeg)]](https://img-blog.csdnimg.cn/04416a5e15e54f9b8c075a00dac68429.png)
- 完成该过程后,按输入键重新启动系统。重新启动后,我们的系统将处于以前的状态。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-wQpkblPA-1660832951148)(images/YlXTyJgdnlE02YTi0lUSdGZP0ywZ2xgUD5bPGmKaJ5k.jpeg)]](https://img-blog.csdnimg.cn/def413b5e0de4b8bb29a0cba118a03a4.png)
12 Windows与ubuntu时间不同步的问题
// 方法有很多,这里只列举一个
// 如果之前修改过了,那么就不用再修改了
开始->运行->CMD,打开命令行程序 (Vista则要以管理员方式打开命令行程序方可有权限访问注册表),
在命令行中输入下面命令并回车:
Reg add HKLM\SYSTEM\CurrentControlSet\Control\TimeZoneInformation /v RealTimeIsUniversal /t REG_DWORD /d 1
13 截图工具 flameshot(optional)
参考链接:https://blog.csdn.net/u011017694/article/details/105042378
-
Install
sudo apt-get install flameshot -
Take a screenshot by the command
flameshot gui -
Set the shortcut (I recommand Super+Shift+S)
Settings -> Devices -> Keyborad -> Custom Shortcuts

为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐



 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)