旭日X3派 AI推理(yolov5)
使用旭日x3派进行AI模型的推理及验证,使用yolov5模型做验证。
sunrise AI推理
旭日派中最让其期待的就是其中的BPU加速器,可以提供5TOPS的等效AI算力。
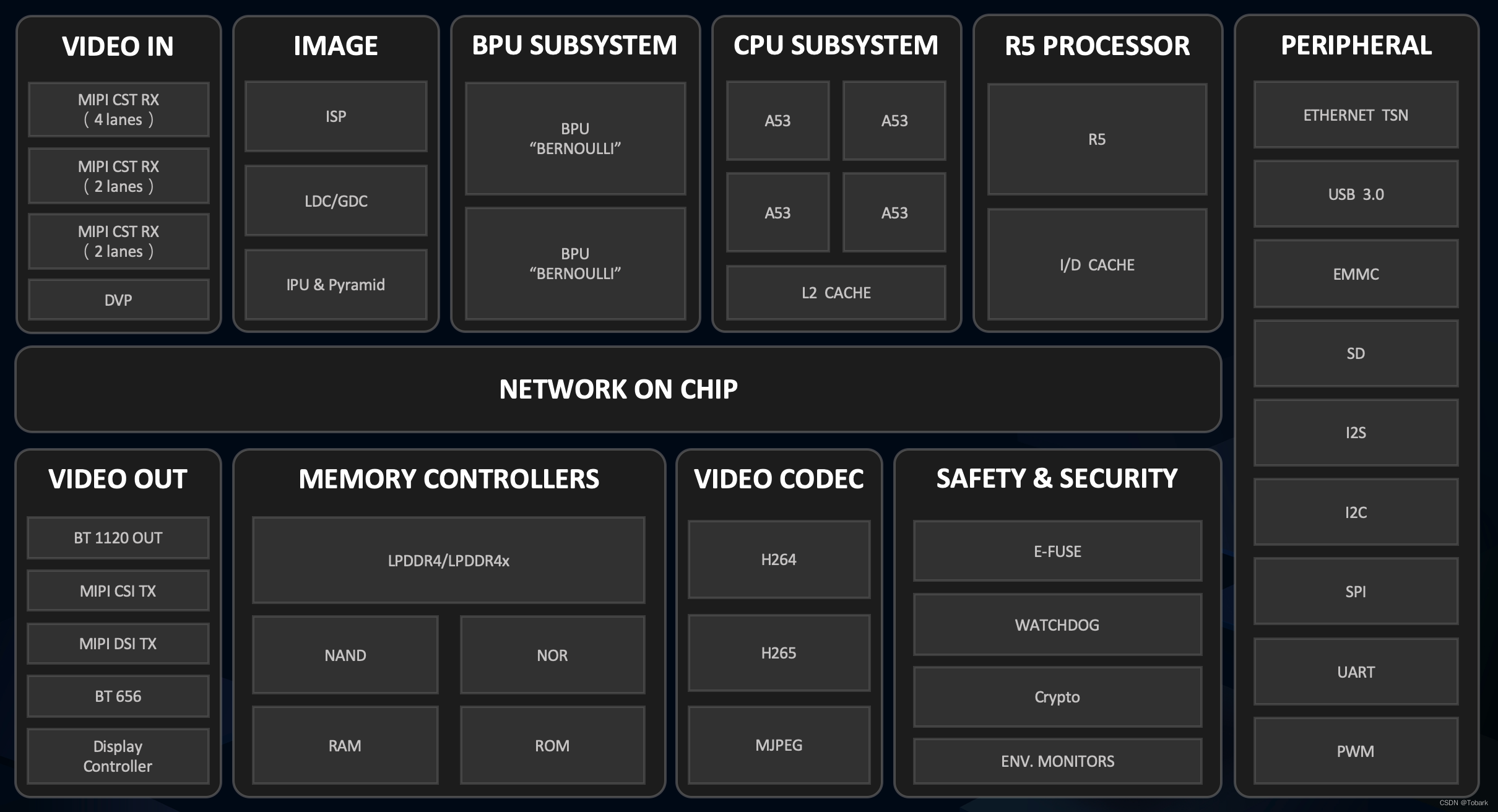
X3芯片概述
BPU是地平线自研的AI加速核,在设计过程中具体结合了AIoT/Auto的场景需求,从算法、计算架构、编译器三个方面进行了软硬协同优化,使得在功耗不变前提下提高数倍的AI计算性能。
X3和J3芯片各内置了两个伯努利2.0的BPU核,它极大提升了对先进CNN网络的支持,同时大大降低了DDR带宽占用率,可提供实时像素级视频分割和结构化视频分析等能力。
详细的内容请参考地平线芯片开发手册
1.图片分类任务
首先是系统中提供的图片分类任务样例
cd /app/ai_inference/01_basic_sample/
sudo python3 ./test_mobilenetv1.py
在test_mobilenetv1.py中对斑马的图片进行了分类,得到的结果如下,通过查看标签编号340: 'zebra'实现了对图片的准确分类。
========== Classification result ==========
cls id: 340 Confidence: 0.991851
为了简单测试下分类算法的结果。使用其他图片进行测试,发现在特征明显时图片分类准确度较高,如对背景干净,特征清晰的金鱼达到了0.999884的置信度,1: 'goldfish, Carassius auratus',也存在图片分类错误的情况存在,如对于玉米进行检测时998: 'ear, spike, capitulum'。

========== Classification result ==========
cls id: 1 Confidence: 0.999884

========== Classification result ==========
cls id: 998 Confidence: 0.753721
2.fcos目标检测快速验证
使用目标检测样例
cd /app/ai_inference/02_usb_camera_sample/
python3 usb_camera_fcos.py
在初探中已经对其进行简单展示,这里将代码进行简单分析,主要包括以下5个部分

其中加载模型 和模型正演为地平线封装的模型方法,from hobot_dnn import pyeasy_dnn as dnn
hdmi显示时地平线封装的vio方法,from hobot_vio import libsrcampy as srcampy
加载的模型是通过地平线工具链编译的bin模型fcos_512x512_nv12.bin,在运行中会对输入和输出的tensor进行打印,可以看出输入的是512x512的图像信息,输入为15个tensor,其中输出包括了检测框坐标、类别、置信度得分等。
tensor type: NV12_SEPARATE
data type: uint8
layout: NCHW
shape: (1, 3, 512, 512)
15
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 64, 64, 80)
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 32, 32, 80)
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 16, 16, 80)
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 8, 8, 80)
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 4, 4, 80)
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 64, 64, 4)
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 32, 32, 4)
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 16, 16, 4)
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 8, 8, 4)
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 4, 4, 4)
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 64, 64, 1)
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 32, 32, 1)
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 16, 16, 1)
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 8, 8, 1)
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 4, 4, 1)
3.改用yolov5进行目标检测
更换yolov5模型进行目标检测,由于工具链中提供了编译后的yolov5模型,这里可以对其直接使用,工具链相关资料在AI工具链资料包其中
horizon_xj3_open_explorer_v1.11.4_20220413\ddk\samples\ai_toolchain\model_zoo\runtime\yolov5
直接在usb_camera_fcos.py中进行模型的替换
models = dnn.load('../models/yolov5_672x672_nv12.bin')
对输入输出进行打印,可以看到输入是一个 (1, 3, 672, 672)的tensor,而输出为3层的tensor,输出的不同代表着需要对模型后处理进行重写。
tensor type: NV12_SEPARATE
data type: uint8
layout: NCHW
shape: (1, 3, 672, 672)
3
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 84, 84, 255)
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 42, 42, 255)
tensor type: float32
data type: float32
layout: NHWC
shape: (1, 21, 21, 255)
在这里我找到之前地平线对yolov5的后处理的相关代码和说明,这个位于\horizon_xj3_open_explorer_v1.11.4_20220413\ddk\samples\ai_toolchain\horizon_model_convert_sample\04_detection\03_yolov5\mapper
1.4 对于 YOLOv5 模型,我们在模型结构上的修改点主要在于几个输出节点处。由于目前的浮点转换工具链暂时不支持 5 维的 Reshape,所以我们在 prototxt中进行了删除,并将其移至后处理中执行。同时我们还添加了一个 transpose 算子,使该节点将以 NHWC 进行输出。这是因为在地平线芯片中, BPU 硬件本身以 NHWC 的layout 运行,这样修改后可以让 BPU 直接输出结果,而不在量化模型中引入额外的transpose。 详情请见文档中benchmark部分的图文介绍
根据说明可以看到yolov5应该属于异构量化,部分网络在后处理中执行,这也就代表需要更多的处理时间。在对于样例中给出的fcos的代码,我们主要在后处理处做出相应的调整,并将类别展示做出更换,其中主要代码也是参考了地平线中给出的yolov5的公开代码,做了部分的修改。
相关代码:
#!/usr/bin/env python3
from pyexpat import model
from hobot_dnn import pyeasy_dnn as dnn
from hobot_vio import libsrcampy as srcampy
from easydict import EasyDict
import numpy as np
import cv2
import colorsys
from time import *
# detection model class names
class_names = [
"person",
"bicycle",
"car",
"motorcycle",
"airplane",
"bus",
"train",
"truck",
"boat",
"traffic light",
"fire hydrant",
"stop sign",
"parking meter",
"bench",
"bird",
"cat",
"dog",
"horse",
"sheep",
"cow",
"elephant",
"bear",
"zebra",
"giraffe",
"backpack",
"umbrella",
"handbag",
"tie",
"suitcase",
"frisbee",
"skis",
"snowboard",
"sports ball",
"kite",
"baseball bat",
"baseball glove",
"skateboard",
"surfboard",
"tennis racket",
"bottle", # noqa
"wine glass",
"cup",
"fork",
"knife",
"spoon",
"bowl",
"banana",
"apple",
"sandwich",
"orange",
"broccoli",
"carrot",
"hot dog",
"pizza",
"donut",
"cake",
"chair",
"couch",
"potted plant",
"bed",
"dining table",
"toilet",
"tv",
"laptop",
"mouse",
"remote",
"keyboard",
"cell phone",
"microwave",
"oven",
"toaster",
"sink",
"refrigerator",
"book",
"clock",
"vase",
"scissors",
"teddy bear",
"hair drier",
"toothbrush",
]
# bgr格式图片转换成 NV12格式
def bgr2nv12_opencv(image):
height, width = image.shape[0], image.shape[1]
area = height * width
yuv420p = cv2.cvtColor(image, cv2.COLOR_BGR2YUV_I420).reshape((area * 3 // 2,))
y = yuv420p[:area]
uv_planar = yuv420p[area:].reshape((2, area // 4))
uv_packed = uv_planar.transpose((1, 0)).reshape((area // 2,))
nv12 = np.zeros_like(yuv420p)
nv12[:height * width] = y
nv12[height * width:] = uv_packed
return nv12
def get_yolov5_config():
yolov5_config = EasyDict()
yolov5_config.ANCHORS = np.array([
10, 13, 16, 30, 33, 23, 30, 61, 62, 45, 59, 119, 116, 90, 156, 198,
373, 326
]).reshape((3, 3, 2))
yolov5_config.STRIDES = np.array([8, 16, 32])
yolov5_config.NUM_CLASSES = 80
yolov5_config.CLASSES = class_names
yolov5_config.INPUT_SHAPE = (672, 672)
return yolov5_config
def yolov5_decoder(conv_output, num_anchors, num_classes, anchors, stride):
def sigmoid(x):
return 1. / (1 + np.exp(-x))
# Five dimension output: [batch_size, num_anchors, output_size, output_size, 5 + num_classes]
batch_size = conv_output.shape[0]
output_size = conv_output.shape[-2]
conv_raw_dxdy = conv_output[:, :, :, :, 0:2]
conv_raw_dwdh = conv_output[:, :, :, :, 2:4]
conv_raw_conf = conv_output[:, :, :, :, 4:5]
conv_raw_prob = conv_output[:, :, :, :, 5:]
y = np.tile(
np.arange(output_size, dtype=np.int32)[:, np.newaxis],
[1, output_size])
x = np.tile(
np.arange(output_size, dtype=np.int32)[np.newaxis, :],
[output_size, 1])
xy_grid = np.concatenate([x[:, :, np.newaxis], y[:, :, np.newaxis]],
axis=-1)
xy_grid = np.tile(xy_grid[np.newaxis, np.newaxis, :, :, :],
[batch_size, num_anchors, 1, 1, 1])
xy_grid = xy_grid.astype(np.float32)
pred_xy = (sigmoid(conv_raw_dxdy) * 2.0 - 0.5 + xy_grid) * stride
pred_wh = (sigmoid(conv_raw_dwdh) *
2.0)**2 * anchors[np.newaxis, :, np.newaxis, np.newaxis, :]
pred_xywh = np.concatenate([pred_xy, pred_wh], axis=-1)
pred_conf = sigmoid(conv_raw_conf)
pred_prob = sigmoid(conv_raw_prob)
decode_output = np.concatenate([pred_xywh, pred_conf, pred_prob], axis=-1)
return decode_output
def postprocess_boxes(pred_bbox,
org_img_shape,
input_shape,
score_threshold=0.5):
"""post process boxes"""
valid_scale = [0, np.inf]
org_h, org_w = org_img_shape
input_h, input_w = input_shape
pred_bbox = np.array(pred_bbox)
pred_xywh = pred_bbox[:, :4]
pred_conf = pred_bbox[:, 4]
pred_prob = pred_bbox[:, 5:]
# (x, y, w, h) --> (xmin, ymin, xmax, ymax)
pred_coor = np.concatenate([
pred_xywh[:, :2] - pred_xywh[:, 2:] * 0.5,
pred_xywh[:, :2] + pred_xywh[:, 2:] * 0.5
],
axis=-1)
# (xmin, ymin, xmax, ymax) -> (xmin_org, ymin_org, xmax_org, ymax_org)
resize_ratio = min(input_h / org_h, input_w / org_w)
dw = (input_w - resize_ratio * org_w) / 2
dh = (input_h - resize_ratio * org_h) / 2
pred_coor[:, 0::2] = 1.0 * (pred_coor[:, 0::2] - dw) / resize_ratio
pred_coor[:, 1::2] = 1.0 * (pred_coor[:, 1::2] - dh) / resize_ratio
# clip the range of bbox
pred_coor = np.concatenate([
np.maximum(pred_coor[:, :2], [0, 0]),
np.minimum(pred_coor[:, 2:], [org_w - 1, org_h - 1])
],
axis=-1)
# drop illegal boxes whose max < min
invalid_mask = np.logical_or((pred_coor[:, 0] > pred_coor[:, 2]),
(pred_coor[:, 1] > pred_coor[:, 3]))
pred_coor[invalid_mask] = 0
# discard invalid boxes
bboxes_scale = np.sqrt(
np.multiply.reduce(pred_coor[:, 2:4] - pred_coor[:, 0:2], axis=-1))
scale_mask = np.logical_and((valid_scale[0] < bboxes_scale),
(bboxes_scale < valid_scale[1]))
# discard boxes with low scores
classes = np.argmax(pred_prob, axis=-1)
scores = pred_conf * pred_prob[np.arange(len(pred_coor)), classes]
score_mask = scores > score_threshold
mask = np.logical_and(scale_mask, score_mask)
coors, scores, classes = pred_coor[mask], scores[mask], classes[mask]
return np.concatenate(
[coors, scores[:, np.newaxis], classes[:, np.newaxis]], axis=-1)
def postprocess(model_output,
model_hw_shape,
origin_image=None,
origin_img_shape=None,
score_threshold=0.4,
nms_threshold=0.45,
dump_image=True):
yolov5_config = get_yolov5_config()
classes = yolov5_config.CLASSES
num_classes = yolov5_config.NUM_CLASSES
anchors = yolov5_config.ANCHORS
num_anchors = anchors.shape[0]
strides = yolov5_config.STRIDES
input_shape = yolov5_config.INPUT_SHAPE
if origin_image is not None:
org_height, org_width = origin_image.shape[1:3]
else:
org_height, org_width = origin_img_shape
process_height, process_width = model_hw_shape
pred_sbbox, pred_mbbox, pred_lbbox = model_output[0].buffer.reshape([1, 84, 84, 3,
85]).transpose([0, 3, 1, 2, 4]), model_output[1].buffer.reshape([1, 42, 42, 3,
85]).transpose([0, 3, 1, 2, 4]), model_output[2].buffer.reshape([1, 21, 21, 3,
85]).transpose([0, 3, 1, 2, 4])
pred_sbbox = yolov5_decoder(pred_sbbox, num_anchors, num_classes,
anchors[0], strides[0])
pred_mbbox = yolov5_decoder(pred_mbbox, num_anchors, num_classes,
anchors[1], strides[1])
pred_lbbox = yolov5_decoder(pred_lbbox, num_anchors, num_classes,
anchors[2], strides[2])
pred_bbox = np.concatenate([
np.reshape(pred_sbbox, (-1, 5 + num_classes)),
np.reshape(pred_mbbox, (-1, 5 + num_classes)),
np.reshape(pred_lbbox, (-1, 5 + num_classes))
],
axis=0)
bboxes = postprocess_boxes(pred_bbox, (org_height, org_width),
input_shape=(process_height, process_width),
score_threshold=score_threshold)
nms_bboxes = nms(bboxes, nms_threshold)
if dump_image and origin_image is not None:
print("detected item num: ", len(nms_bboxes))
draw_bboxs(origin_image[0], nms_bboxes)
return nms_bboxes
def get_classes(class_file_name='coco_classes.names'):
'''loads class name from a file'''
names = {}
with open(class_file_name, 'r') as data:
for ID, name in enumerate(data):
names[ID] = name.strip('\n')
return names
def draw_bboxs(image, bboxes, gt_classes_index=None, classes=get_classes()):
"""draw the bboxes in the original image
"""
num_classes = len(classes)
image_h, image_w, channel = image.shape
hsv_tuples = [(1.0 * x / num_classes, 1., 1.) for x in range(num_classes)]
colors = list(map(lambda x: colorsys.hsv_to_rgb(*x), hsv_tuples))
colors = list(
map(lambda x: (int(x[0] * 255), int(x[1] * 255), int(x[2] * 255)),
colors))
fontScale = 0.5
bbox_thick = int(0.6 * (image_h + image_w) / 600)
for i, bbox in enumerate(bboxes):
coor = np.array(bbox[:4], dtype=np.int32)
if gt_classes_index == None:
class_index = int(bbox[5])
score = bbox[4]
else:
class_index = gt_classes_index[i]
score = 1
bbox_color = colors[class_index]
c1, c2 = (coor[0], coor[1]), (coor[2], coor[3])
cv2.rectangle(image, c1, c2, bbox_color, bbox_thick)
classes_name = classes[class_index]
bbox_mess = '%s: %.2f' % (classes_name, score)
t_size = cv2.getTextSize(bbox_mess,
0,
fontScale,
thickness=bbox_thick // 2)[0]
cv2.rectangle(image, c1, (c1[0] + t_size[0], c1[1] - t_size[1] - 3),
bbox_color, -1)
cv2.putText(image,
bbox_mess, (c1[0], c1[1] - 2),
cv2.FONT_HERSHEY_SIMPLEX,
fontScale, (0, 0, 0),
bbox_thick // 2,
lineType=cv2.LINE_AA)
print("{} is in the picture with confidence:{:.4f}".format(
classes_name, score))
# cv2.imwrite("demo.jpg", image)
return image
def yolov5_decoder(conv_output, num_anchors, num_classes, anchors, stride):
def sigmoid(x):
return 1. / (1 + np.exp(-x))
# Five dimension output: [batch_size, num_anchors, output_size, output_size, 5 + num_classes]
batch_size = conv_output.shape[0]
output_size = conv_output.shape[-2]
conv_raw_dxdy = conv_output[:, :, :, :, 0:2]
conv_raw_dwdh = conv_output[:, :, :, :, 2:4]
conv_raw_conf = conv_output[:, :, :, :, 4:5]
conv_raw_prob = conv_output[:, :, :, :, 5:]
y = np.tile(
np.arange(output_size, dtype=np.int32)[:, np.newaxis],
[1, output_size])
x = np.tile(
np.arange(output_size, dtype=np.int32)[np.newaxis, :],
[output_size, 1])
xy_grid = np.concatenate([x[:, :, np.newaxis], y[:, :, np.newaxis]],
axis=-1)
xy_grid = np.tile(xy_grid[np.newaxis, np.newaxis, :, :, :],
[batch_size, num_anchors, 1, 1, 1])
xy_grid = xy_grid.astype(np.float32)
pred_xy = (sigmoid(conv_raw_dxdy) * 2.0 - 0.5 + xy_grid) * stride
pred_wh = (sigmoid(conv_raw_dwdh) *
2.0)**2 * anchors[np.newaxis, :, np.newaxis, np.newaxis, :]
pred_xywh = np.concatenate([pred_xy, pred_wh], axis=-1)
pred_conf = sigmoid(conv_raw_conf)
pred_prob = sigmoid(conv_raw_prob)
decode_output = np.concatenate([pred_xywh, pred_conf, pred_prob], axis=-1)
return decode_output
def nms(bboxes, iou_threshold, sigma=0.3, method='nms'):
def bboxes_iou(boxes1, boxes2):
boxes1 = np.array(boxes1)
boxes2 = np.array(boxes2)
boxes1_area = (boxes1[..., 2] - boxes1[..., 0]) * \
(boxes1[..., 3] - boxes1[..., 1])
boxes2_area = (boxes2[..., 2] - boxes2[..., 0]) * \
(boxes2[..., 3] - boxes2[..., 1])
left_up = np.maximum(boxes1[..., :2], boxes2[..., :2])
right_down = np.minimum(boxes1[..., 2:], boxes2[..., 2:])
inter_section = np.maximum(right_down - left_up, 0.0)
inter_area = inter_section[..., 0] * inter_section[..., 1]
union_area = boxes1_area + boxes2_area - inter_area
ious = np.maximum(1.0 * inter_area / union_area,
np.finfo(np.float32).eps)
return ious
classes_in_img = list(set(bboxes[:, 5]))
best_bboxes = []
for cls in classes_in_img:
cls_mask = (bboxes[:, 5] == cls)
cls_bboxes = bboxes[cls_mask]
while len(cls_bboxes) > 0:
max_ind = np.argmax(cls_bboxes[:, 4])
best_bbox = cls_bboxes[max_ind]
best_bboxes.append(best_bbox)
cls_bboxes = np.concatenate(
[cls_bboxes[:max_ind], cls_bboxes[max_ind + 1:]])
iou = bboxes_iou(best_bbox[np.newaxis, :4], cls_bboxes[:, :4])
weight = np.ones((len(iou),), dtype=np.float32)
assert method in ['nms', 'soft-nms']
if method == 'nms':
iou_mask = iou > iou_threshold
weight[iou_mask] = 0.0
if method == 'soft-nms':
weight = np.exp(-(1.0 * iou ** 2 / sigma))
cls_bboxes[:, 4] = cls_bboxes[:, 4] * weight
score_mask = cls_bboxes[:, 4] > 0.
cls_bboxes = cls_bboxes[score_mask]
return best_bboxes
def print_properties(pro):
print("tensor type:", pro.tensor_type)
print("data type:", pro.dtype)
print("layout:", pro.layout)
print("shape:", pro.shape)
if __name__ == '__main__':
models = dnn.load('../models/yolov5_672x672_nv12.bin')
# 打印输入 tensor 的属性
print_properties(models[0].inputs[0].properties)
# 打印输出 tensor 的属性
print(len(models[0].outputs))
for output in models[0].outputs:
print_properties(output.properties)
# 打开 usb camera: /dev/video8
cap = cv2.VideoCapture(8)
if(not cap.isOpened()):
exit(-1)
print("Open usb camera successfully")
# 设置usb camera的输出图像格式为 MJPEG, 分辨率 1920 x 1080
codec = cv2.VideoWriter_fourcc( 'M', 'J', 'P', 'G' )
cap.set(cv2.CAP_PROP_FOURCC, codec)
cap.set(cv2.CAP_PROP_FPS, 30)
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 1920)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 1080)
# Get HDMI display object
disp = srcampy.Display()
# For the meaning of parameters, please refer to the relevant documents of HDMI display
disp.display(0, 1920, 1080)
while True:
begin_time = time()
_ ,frame = cap.read()
# print(frame.shape)
if frame is None:
print("Failed to get image from usb camera")
# 把图片缩放到模型的输入尺寸
# 获取算法模型的输入tensor 的尺寸
h, w = models[0].inputs[0].properties.shape[2], models[0].inputs[0].properties.shape[3]
des_dim = (w, h)
resized_data = cv2.resize(frame, des_dim, interpolation=cv2.INTER_AREA)
nv12_data = bgr2nv12_opencv(resized_data)
cv_time = time()
print("cv_time = ",cv_time-begin_time)
# Forward
outputs = models[0].forward(nv12_data)
Forward_time = time()
print("Forward_time = ",Forward_time-cv_time)
# Do post process
input_shape = (h, w)
prediction_bbox = postprocess(outputs, input_shape, origin_img_shape=(1080,1920))
postprocess_time = time()
print("postprocess_time= ",postprocess_time-Forward_time)
# Draw bboxs
box_bgr = draw_bboxs(frame, prediction_bbox)
cv2.imwrite("imf.jpg", box_bgr)
# Convert to nv12 for HDMI display
box_nv12 = bgr2nv12_opencv(box_bgr)
disp.set_img(box_nv12.tobytes())
end_time = time()
runtime = end_time -begin_time
print('time:',runtime)
检测结果:
运行指令
python3 usb_camera_yolov5.py
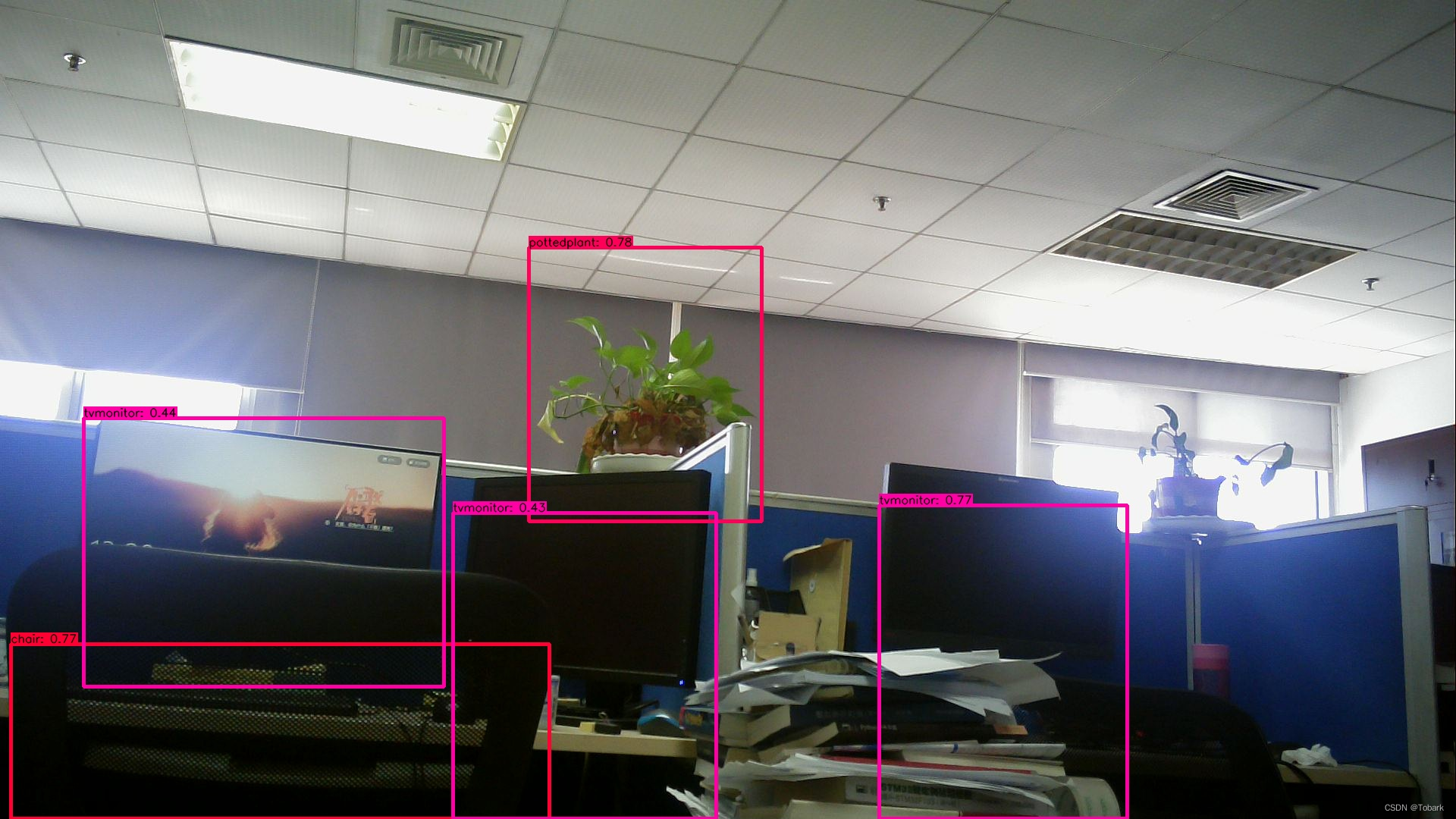
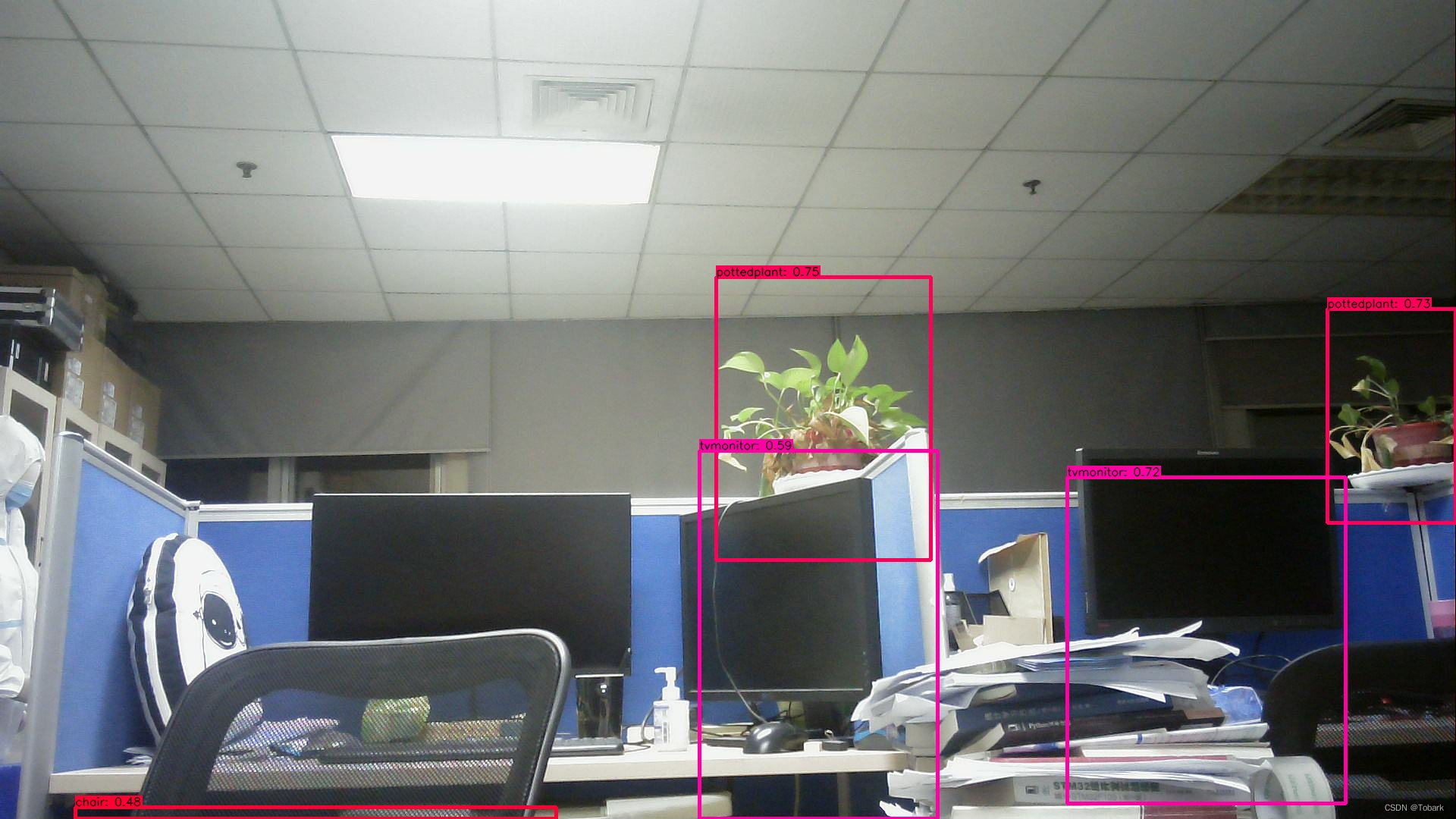
将检测结果输出,可以看到对环境中的大部分物品做出了及时的检测,置信度也很高。
对时间进行统计,检测的时间根据实际环境中的复杂度变化而变化,经过实际测试发现在0.5s~0.8s之间,检测结果较快。主要对cv_time(获取图像并缩放到模型的输入尺寸)、forward_time(模型的正向推演)、postprocess_time(后处理)时间进行了统计,其中模型量化后的时间主要是Forward_time,可以看到需要的时间较短,表明模型的量化有效的减少了检测时间。占用的时间主要集中在后处理和显示,还有优化的空间。
time: 0.8004379272460938
cv_time = 0.15749073028564453
Forward_time = 0.06625533103942871
postprocess_time= 0.38094043731689453
chair is in the picture with confidence:0.8259
pottedplant is in the picture with confidence:0.7951
tvmonitor is in the picture with confidence:0.7798
tvmonitor is in the picture with confidence:0.4708
tvmonitor is in the picture with confidence:0.4420
time: 0.8241267204284668
cv_time = 0.1624467372894287
Forward_time = 0.06629300117492676
postprocess_time= 0.3649098873138428
chair is in the picture with confidence:0.6791
pottedplant is in the picture with confidence:0.7784
tvmonitor is in the picture with confidence:0.7809
tvmonitor is in the picture with confidence:0.5400
4.使用工具链量化模型
查看工具链介绍主要有以下两种方式:
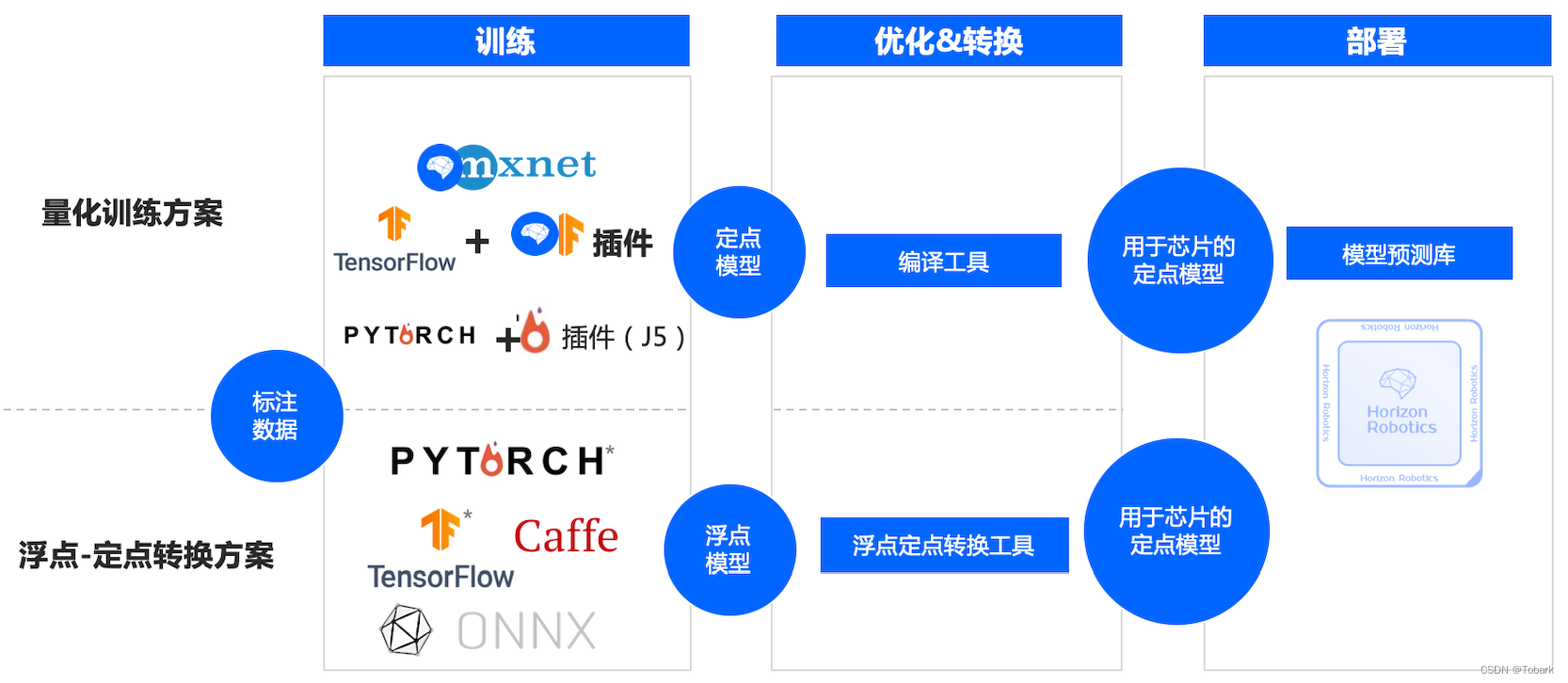
这里使用浮点转定点工具链,这种方法适用于最多的模型,详细介绍可以去查看数据链的视频。
使用wegt下在docker文件,安装docker读取镜像
docker image ls
docker run -it hub.hobot.cc/aitools/ai_toolchain_centos_7_xj3:v2.1.7 /bin/bash
这里发现其中又yolov5s的相关内容,使用该模型进行快速部署
cd /open_explorer/horizon_xj3_open_explorer_v2.1.7_20220520/ddk/samples/ai_toolchain/horizon_model_convert_sample/04_detection/03_yolov5s/mapper
bash 01_check.sh
bash 02_preprocess.sh
bash 03_build.sh #此步骤需要耗费一定时间
在model_output中输出了yolov5s_672x672_nv12.bin ,由于输出模型一致,直接在板子代码中修改运行,得到了与yolo相似的效果。
5.最后
非常有幸作为板子的测试者,第一次使用带有AI加速功能的板子,AI加速还是有惊喜,模型量化后大大减少了CPU的压力,实际测试帧率还有较快。由于教程比较清晰简单,上手也没有难度,很快有了结果,同时有丰富的程序案例,也给了我们自己创作的空间。因为两个帖子主要对板子的一些功能进行了简单测试,笔者水平较低,不一定代表了板子的真实性能,可能会被大家较先看到,后面还有更多大佬的丰富的分享,这里只是抛砖引玉一下,大家可以期待一波。

为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐


 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)