ROS 激光雷达连接数据显示及问题解决
ROS 激光雷达连接数据显示及问题解决配置如下:ubuntu18.04虚拟机ROS-melodic版本Velodyne-16激光雷达安装步骤:1、安装驱动sudo apt-get install ros-indigo-velodynesudo apt-get install ros-kinetic-velodynesudo apt-get install ros-melodic-velodyne根
ROS 激光雷达连接数据显示及问题解决
配置如下:
ubuntu18.04虚拟机
ROS-melodic版本
Velodyne-16激光雷达
安装步骤:
1、安装驱动
sudo apt-get install ros-indigo-velodyne
sudo apt-get install ros-kinetic-velodyne
sudo apt-get install ros-melodic-velodyne
根据ROS版本不同,选择不同版本进行安装。
查看ubuntu版本的方法:
打开新terminal;输入命令:
cat /proc/version

查看ROS版本的方法:
roscore
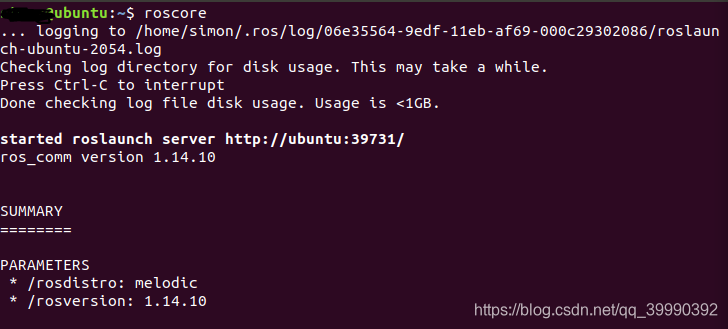
即可看到对应rosdistro的版本;
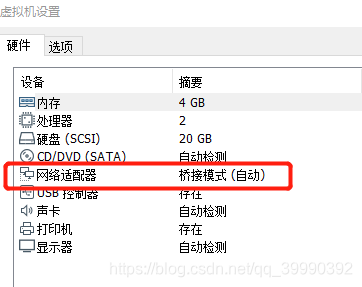
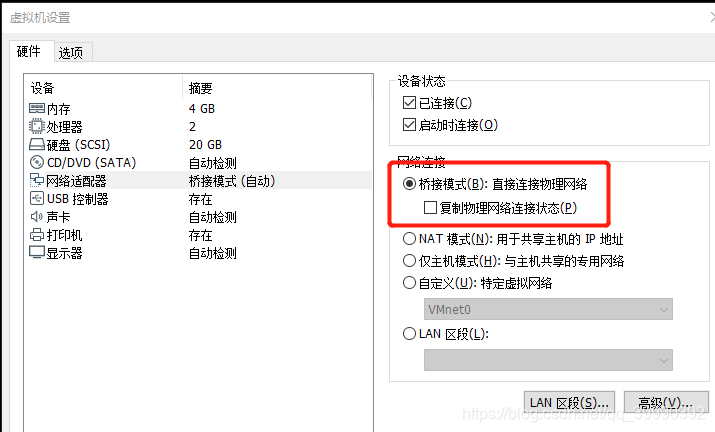
2、虚拟机网络设置:
设置虚拟机网络适配器为桥接模式。

3、配置IP

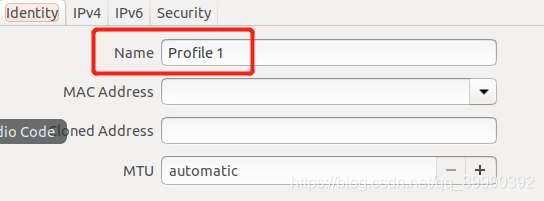
此处可以更改名称;
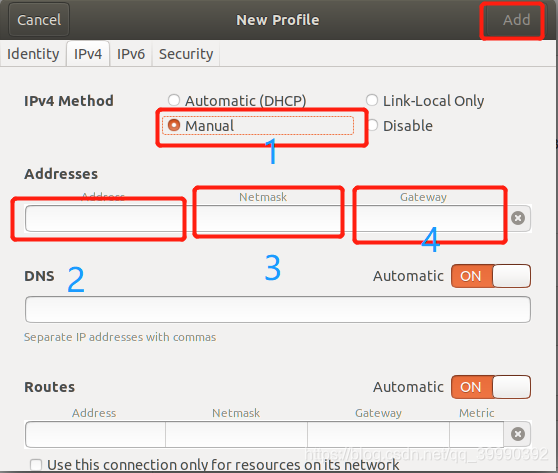
1)选择手动添加模式
2)输入IP地址:192.168.1.XX网段;输入网络掩码:255.255.255.0;默认网关:192.168.1.1;
3)选择Add,添加完成。
4、新建ROS工程
mkdir -p catkin_velodyne/src
cd catkin_velodyne/src
git clone https://github.com/ros-drivers/velodyne.git
cd ..
catkin_make
source devel/setup.bash
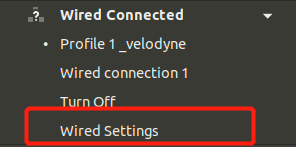
5、连接激光雷达
1)默认情况登录192.168.1.201
查看配置页面
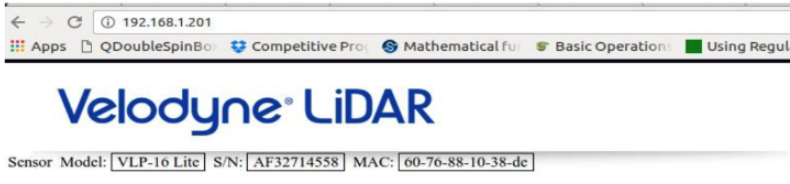
若默认IP被更改,则登录修改后的IP。
2、查看端口号
 需要记住此端口号。
需要记住此端口号。
6、运行roslaunch程序
roslaunch velodyne_pointcloud VLP16_points.launch
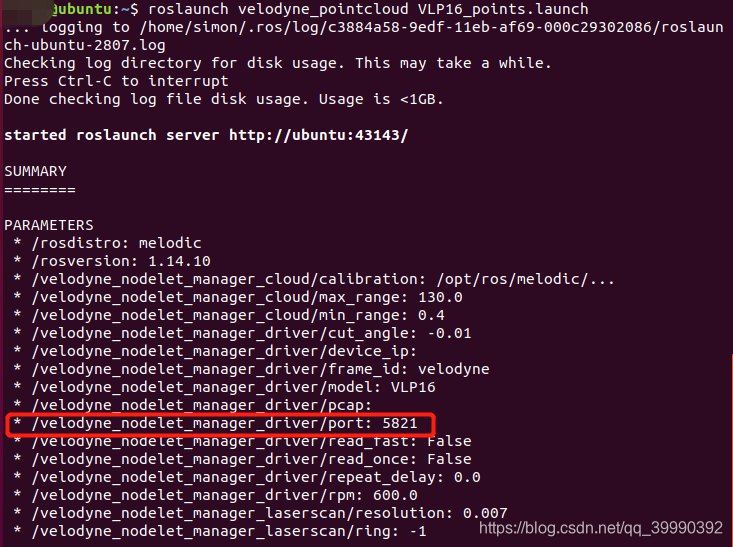
查看此处的端口号是否和配置的端口号一致。
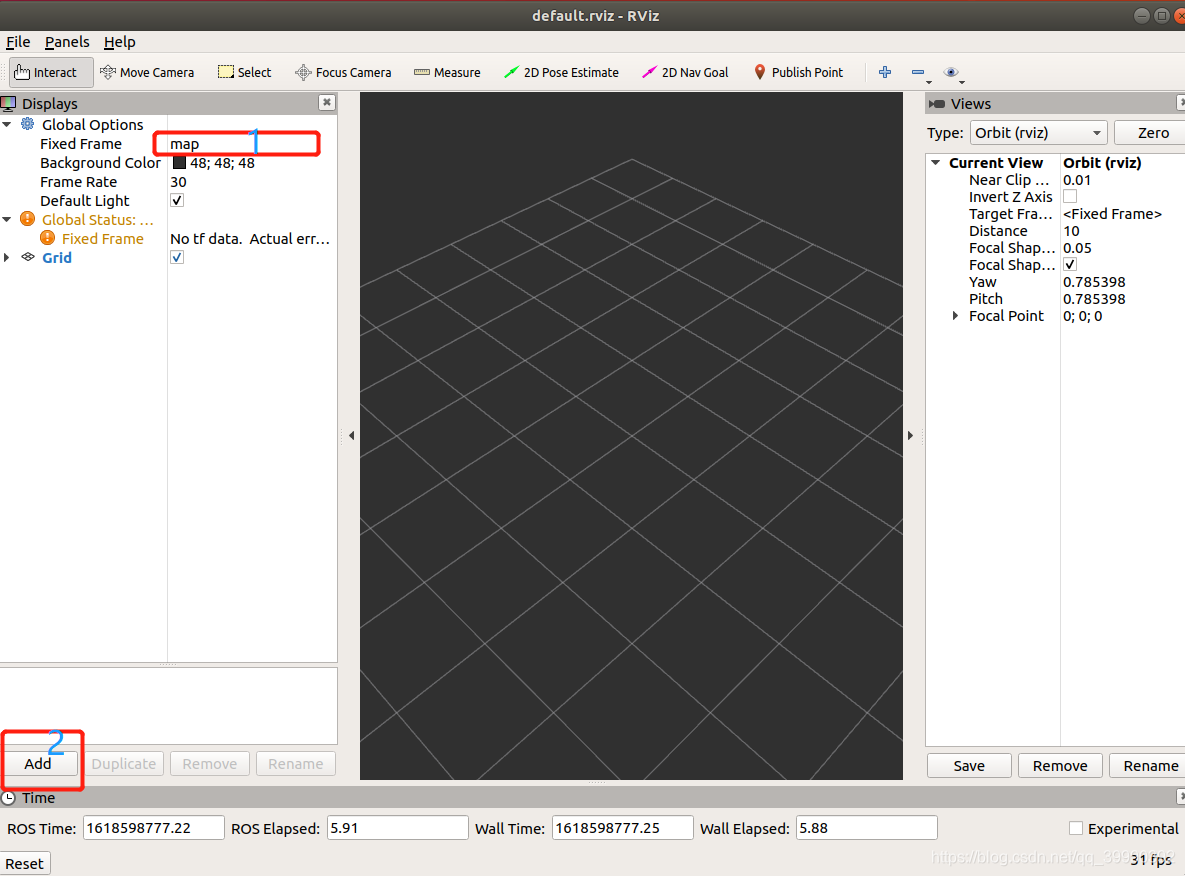
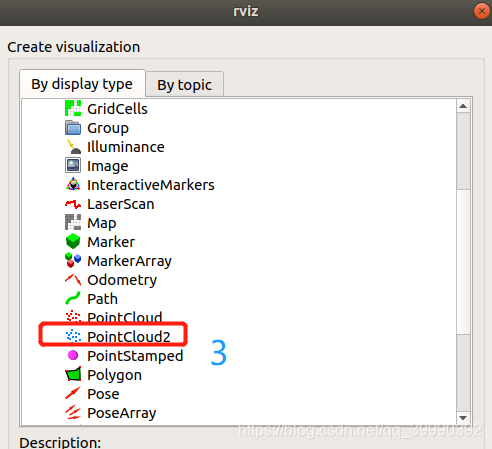
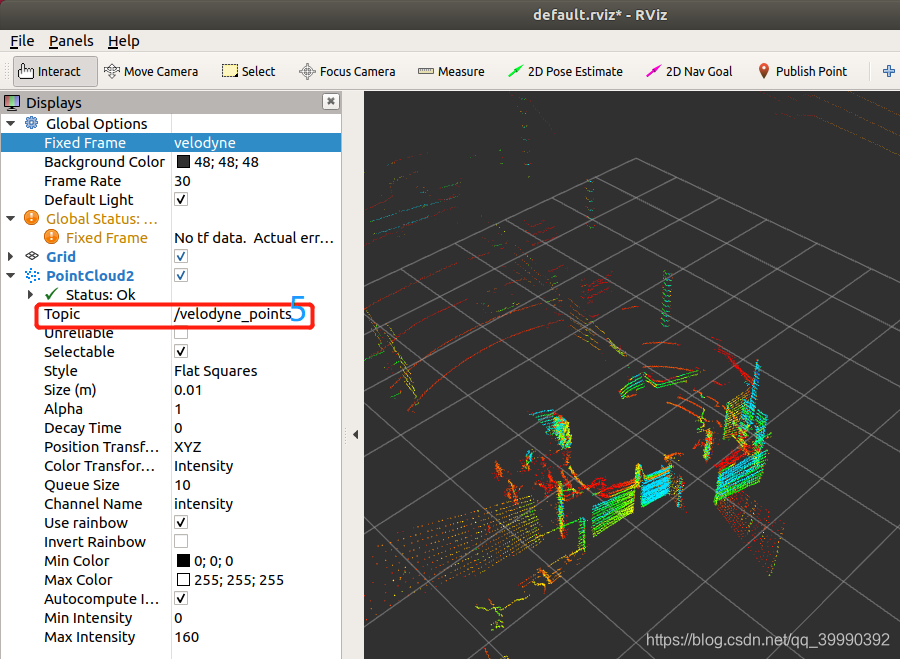
7、rviz查看点云
rosrun rviz rviz
或
rviz
8、配置过程中出现的问题
1)velodyne poll() timeout
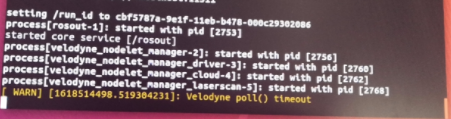
原因1:端口号冲突。
激光雷达配置页面的data port和当前roslaunch的port不一致;
修改成一致,即可解决。
原因2:缺少组件
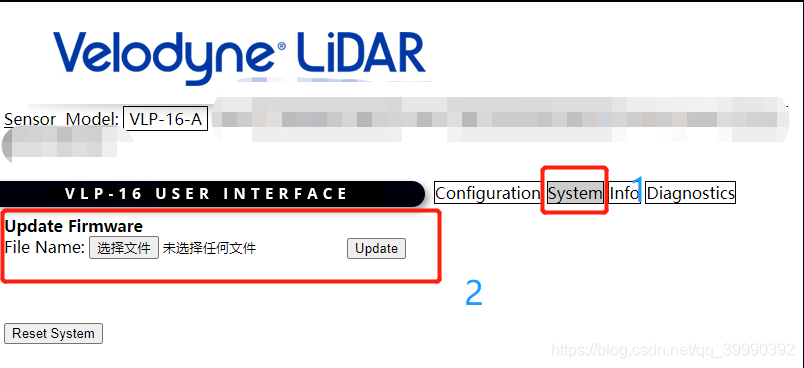
去Velodyne官网查找对应雷达版本。
下载firmware。
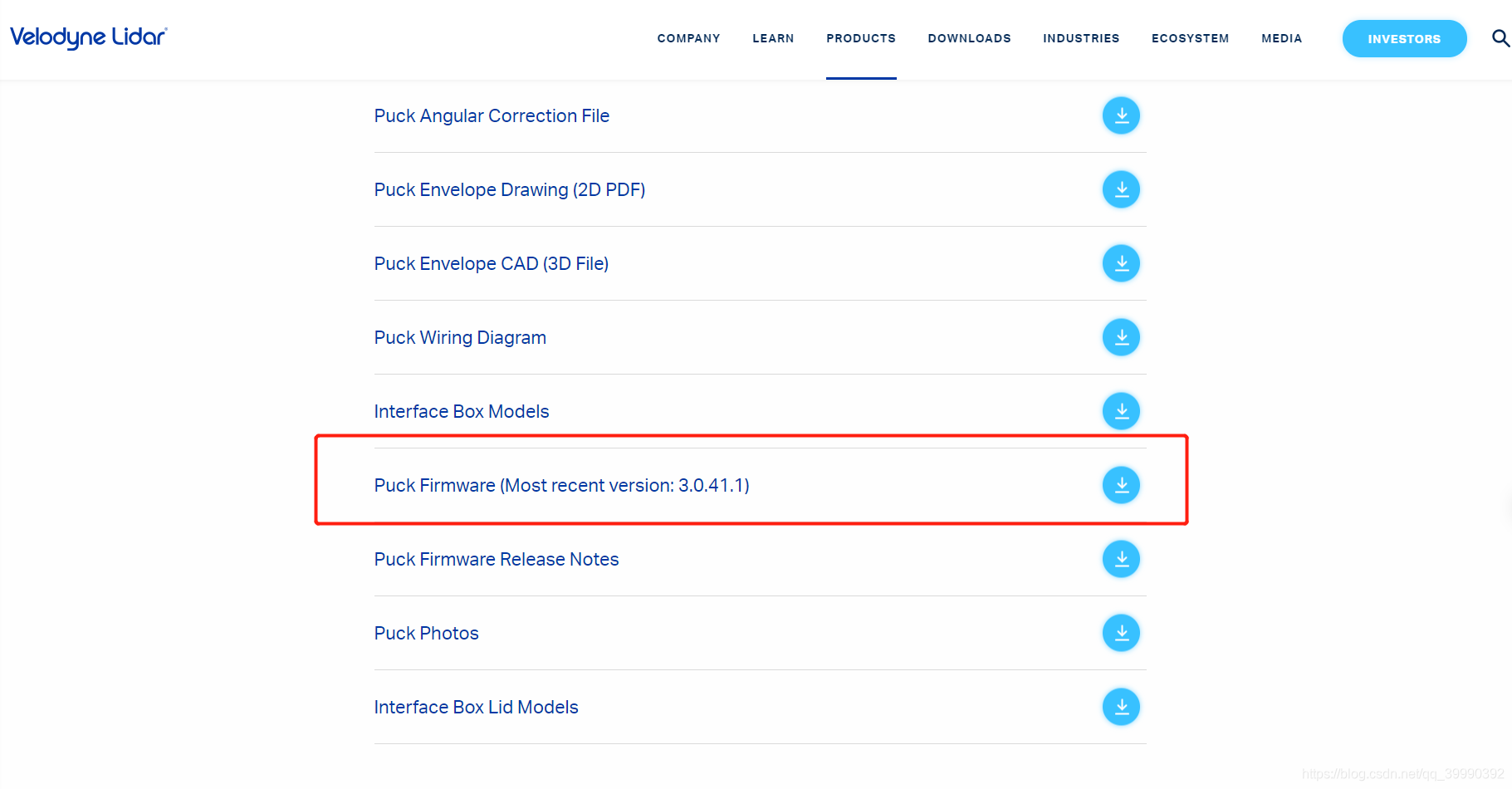
若下载页面显示如下:

在空白处右击,保存成.flash格式即可。
对应位置上传进行update,即可解决。
2)pointcloud2配置的点云无颜色,显示黑白点云
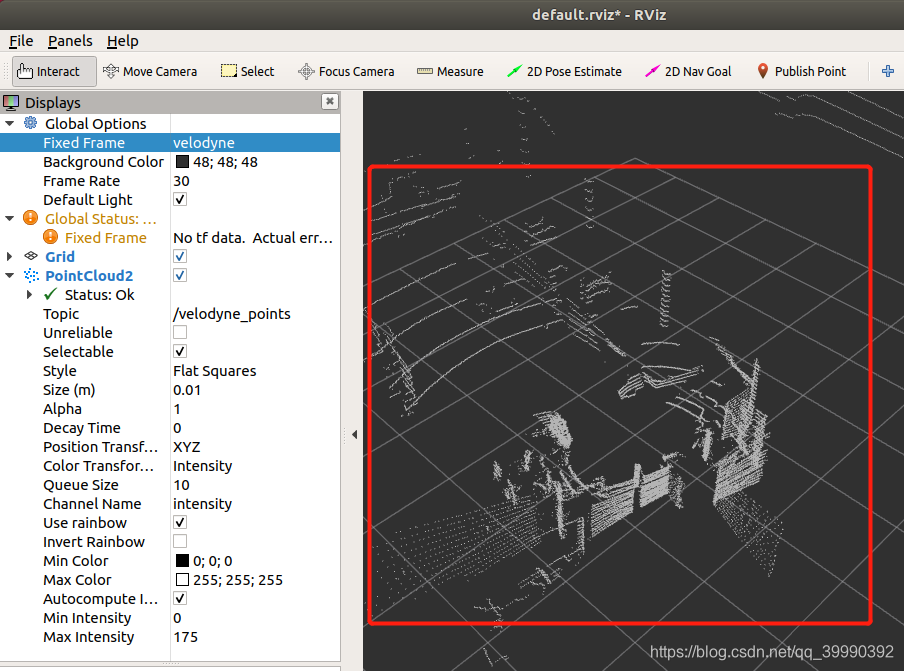
原因:由于ubuntu18.04对应的OpenGl版本太高导致,选择低版本OpenGl即可解决。
rviz --opengl 210

为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐



 1
1 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)