比例谐振(PR)控制
比例谐振(PR)控制
·
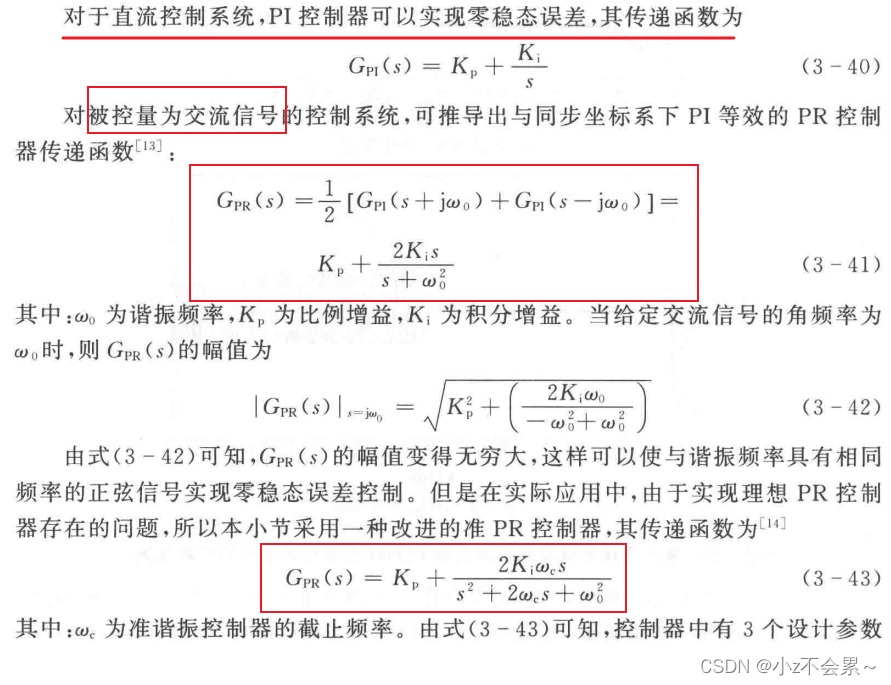
虽然传统的矢量控制技术能够很好地使电机实现解耦控制,但是,在电机运行中,电机的电感,电阻等电机参数会随着磁路的饱和,温度的升高而发生改变,从而使交叉耦合项不准确,进而使系统的控制精度下降。为了解决此问题,诞生了比例谐振(PR)控制的静止坐标系下的电流矢量控制策略。
1 比例谐振控制的基本原理

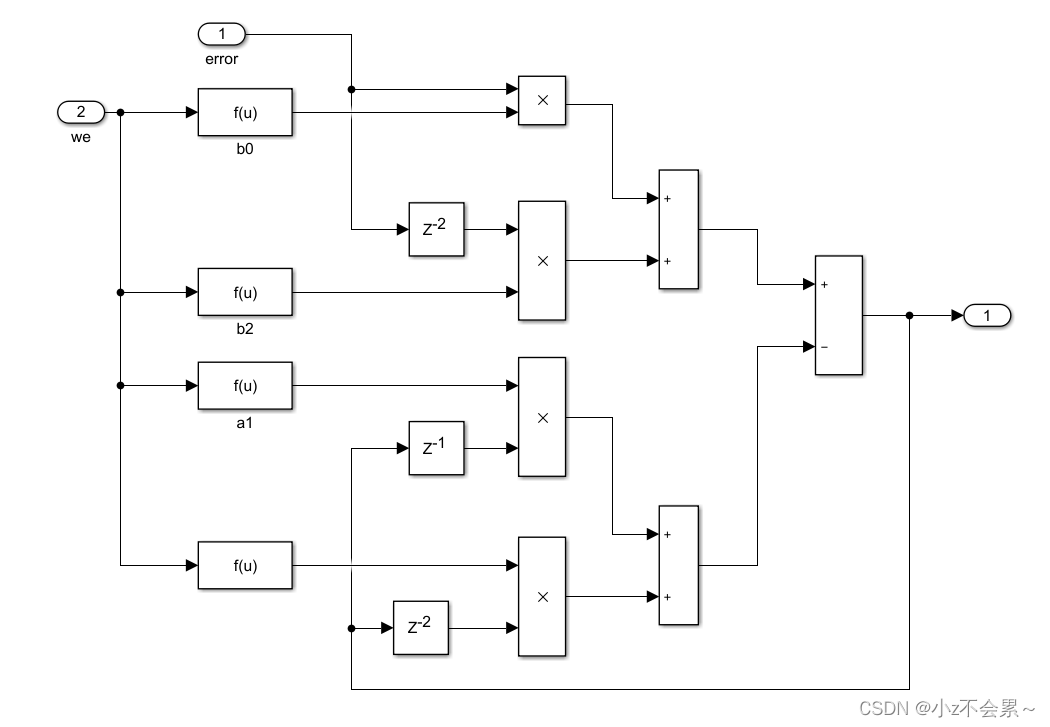
 谐振控制器框图
谐振控制器框图
注意:将上式,
,
,
中的
设置为电角速度
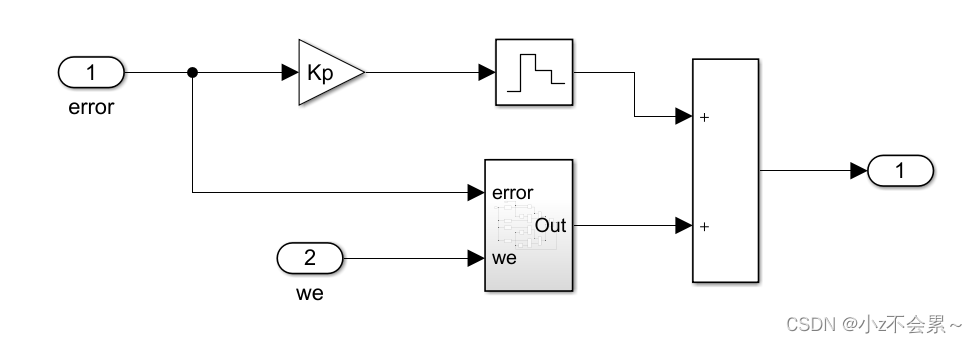
PR控制器的仿真模型
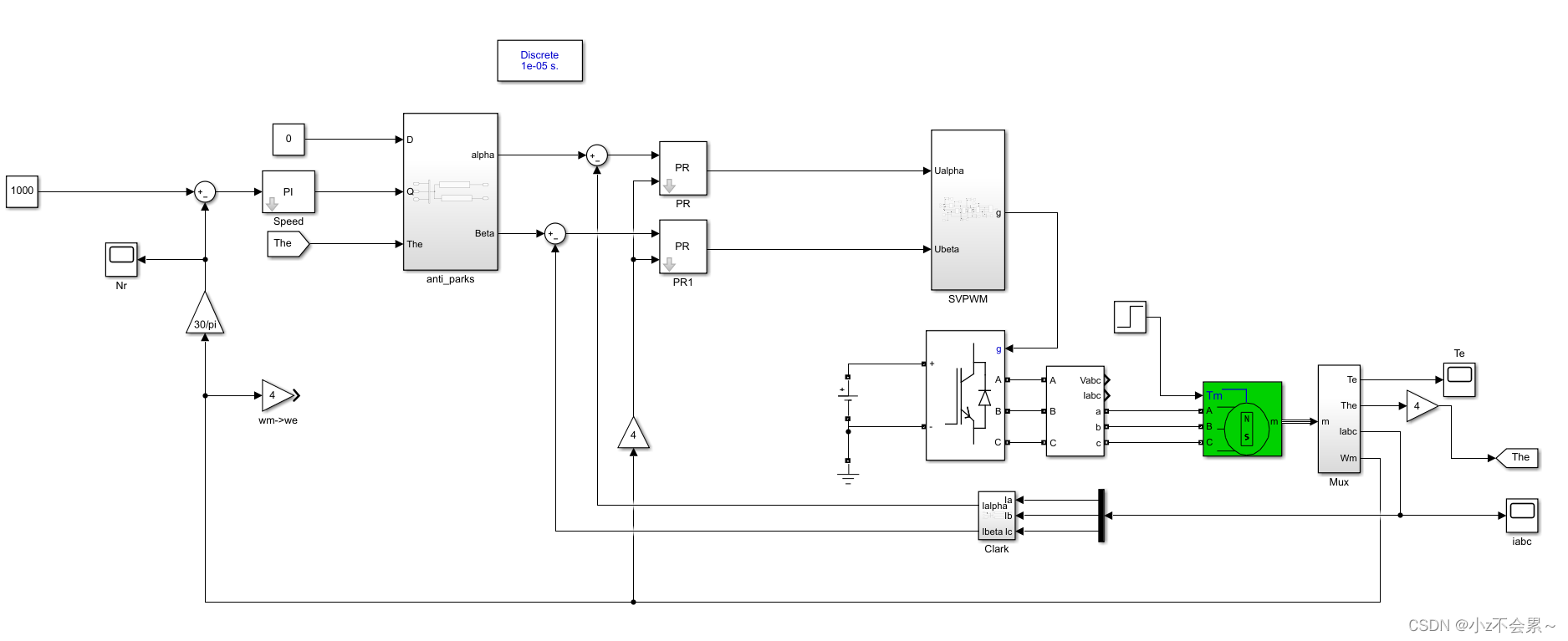
整体系统框图
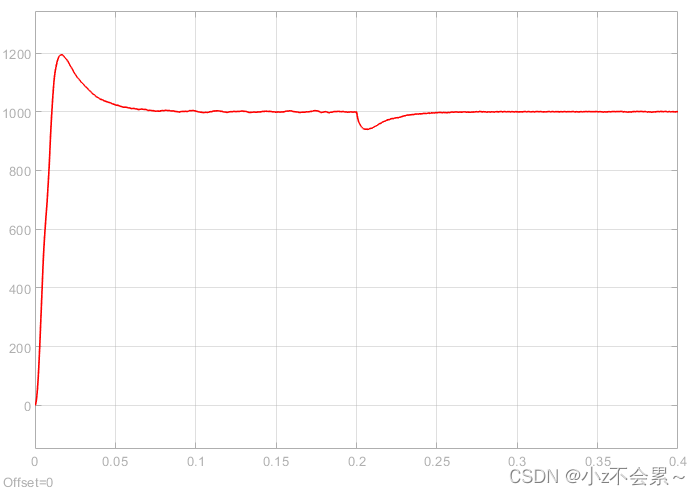
仿真条件设置:参考转速,初始时刻负载转矩
,在
时负载转矩
,PR控制器参数设置为:
,
,仿真结果如下:
转速
 电磁转矩
电磁转矩的变化曲线
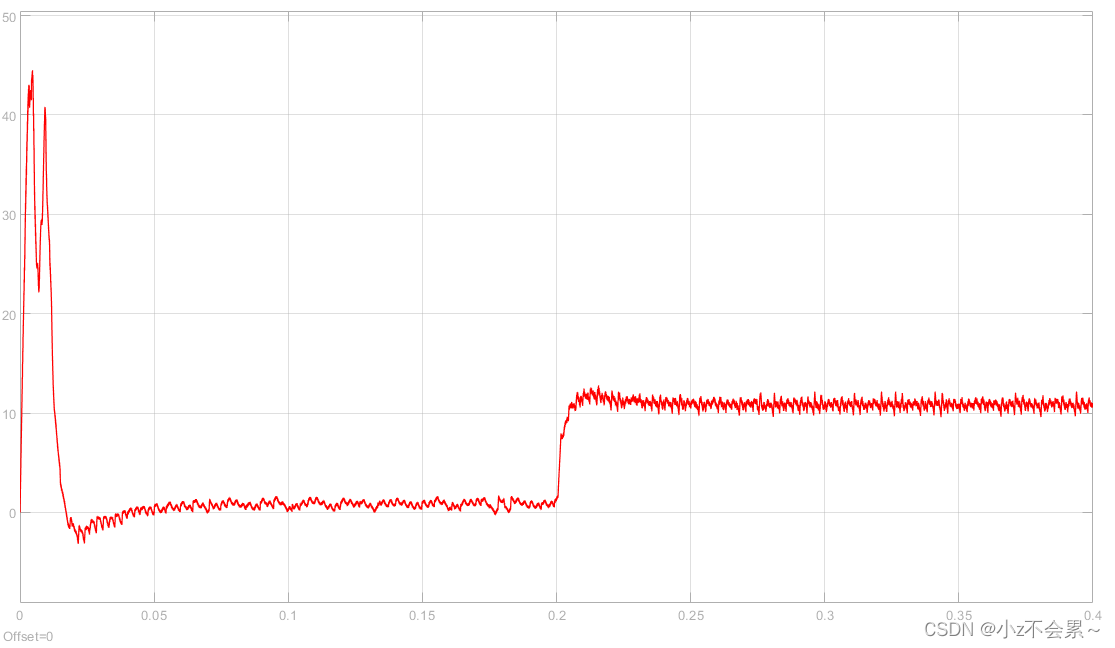
三相电流iabc的变化曲线
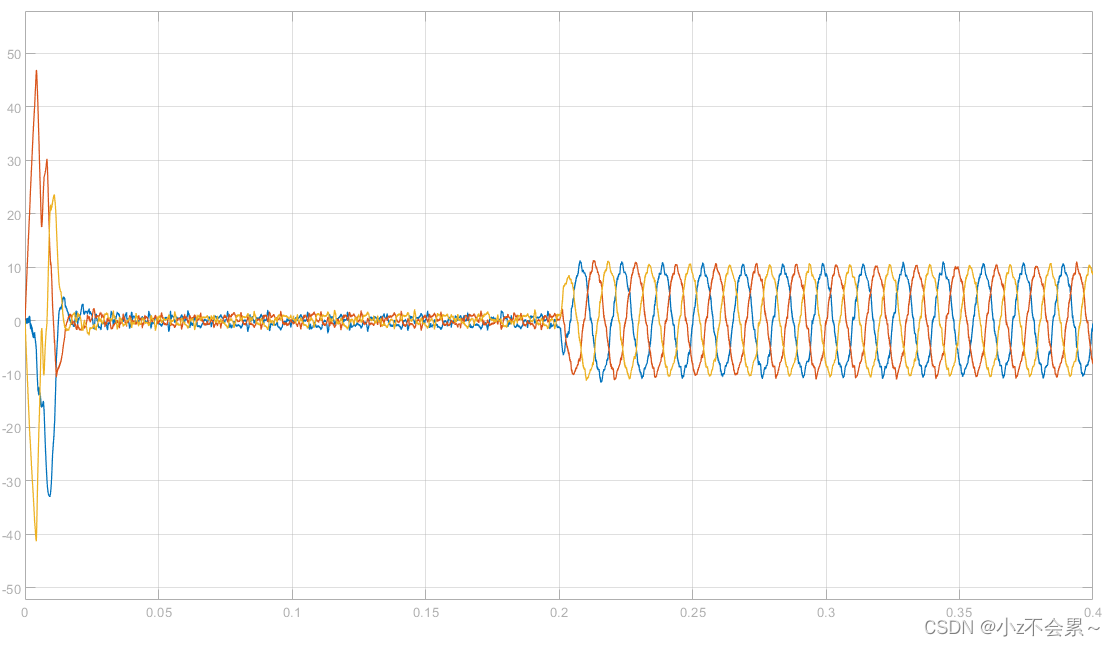
以上仿真结果可以看出,系统具有较快的动态响应速度,并且抗扰性能也比较好,与基于PI调节器的三相PMSM控制系统相比,两种控制算法的仿真结果基本相同,从而说明两种控制算法是等价的,但基于PR控制器的三相PMSM控制系统实现相对简单,不需要进行坐标变换等一系列操作,直接控制交流信号,使其输出达到咱们预设的给定值。PR控制策略不需要解耦,直接控制交流信号来实现无差跟踪。而PI控制器一般是用来控制直流信号。
本文内容摘自袁雷的《现代永磁同步电机控制原理及MATLAB仿真》的第三章,自己做了一下PMSM双闭环PR控制的仿真,这里做一个记录,方便以后查阅,该控制方案对实际工程也有一定的启发,感谢大家的阅读!!!^_^

为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐



 21
21 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)