永磁同步电机转速电流双闭环PI参数整定
永磁同步电机转速电流双闭环PI参数整定
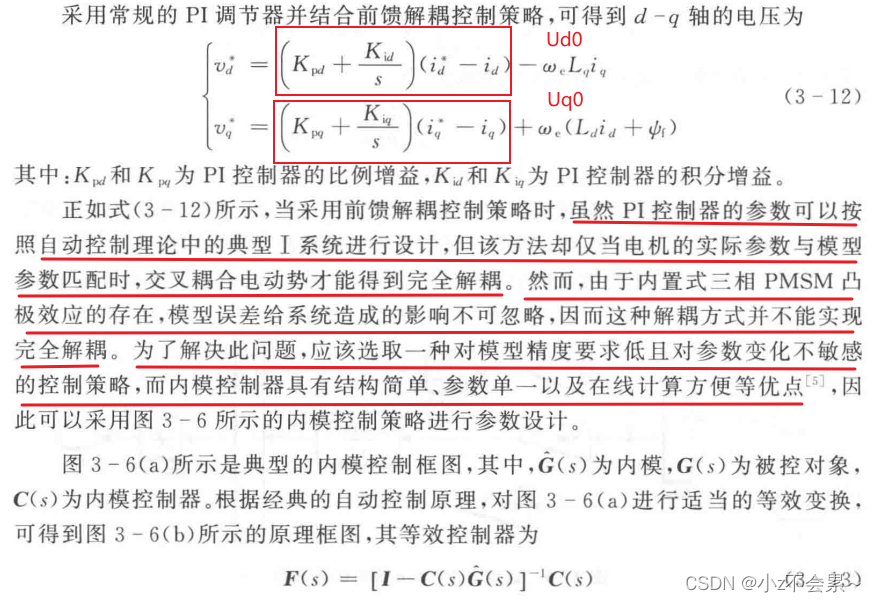
为实现,
的完全解耦,将耦合造成的影响降到最低,需要给电流环增加前馈补偿环节。目前传统的矢量控制常见的方法有
控制和最大转矩电流比控制,前者主要适用于表贴式三相永磁同步电机,后者主要用于内置式三相永磁同步电机。值得说明的是,对于表贴式三相PMSM,
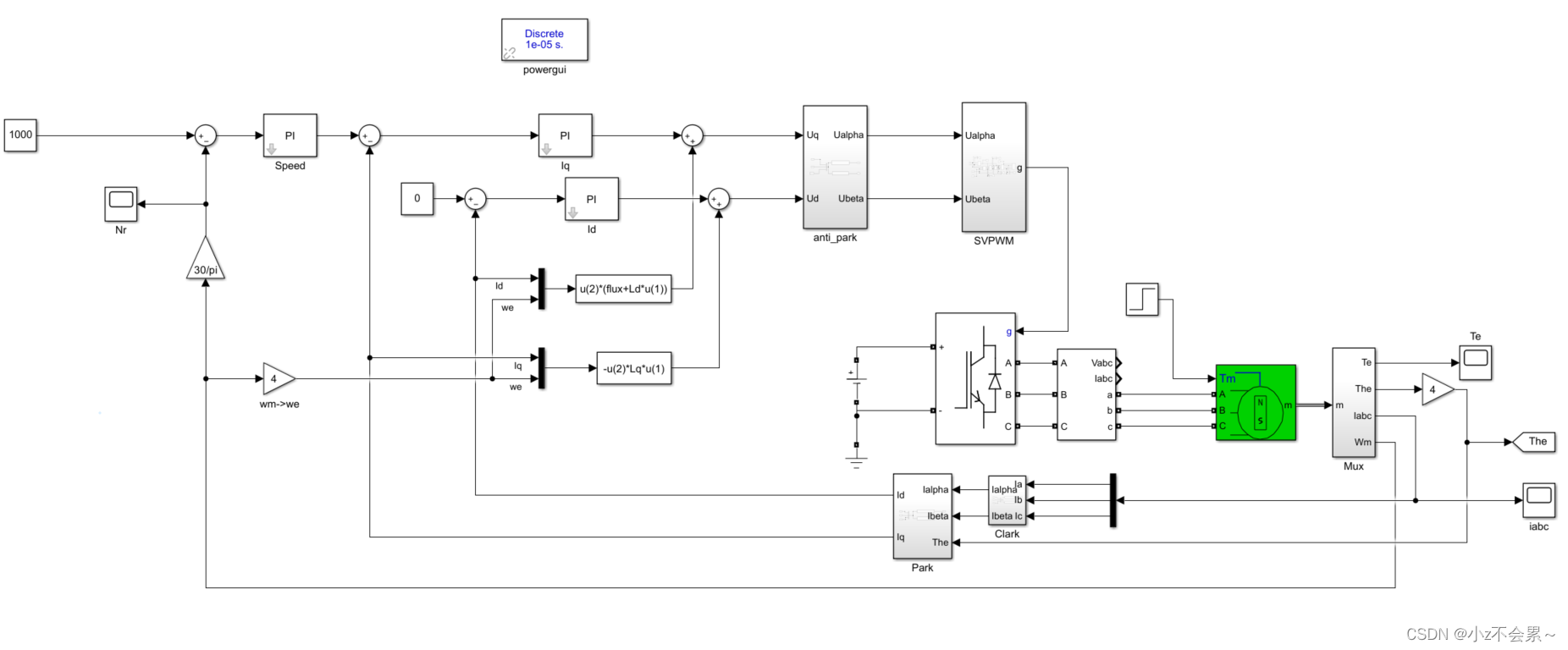
控制和最大转矩电流比控制是等价的。整体控制框图如下:
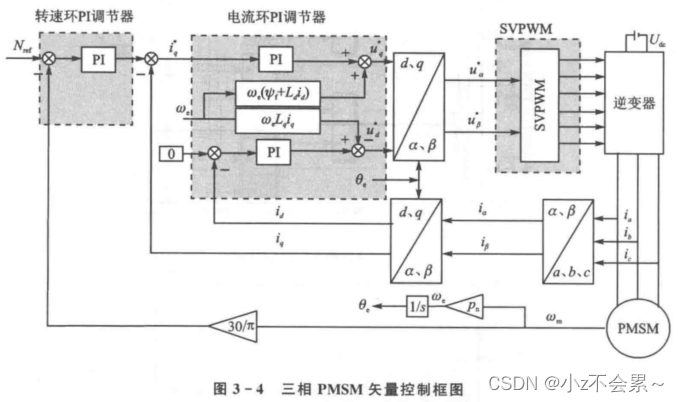
1 电流环PI调节器参数整定
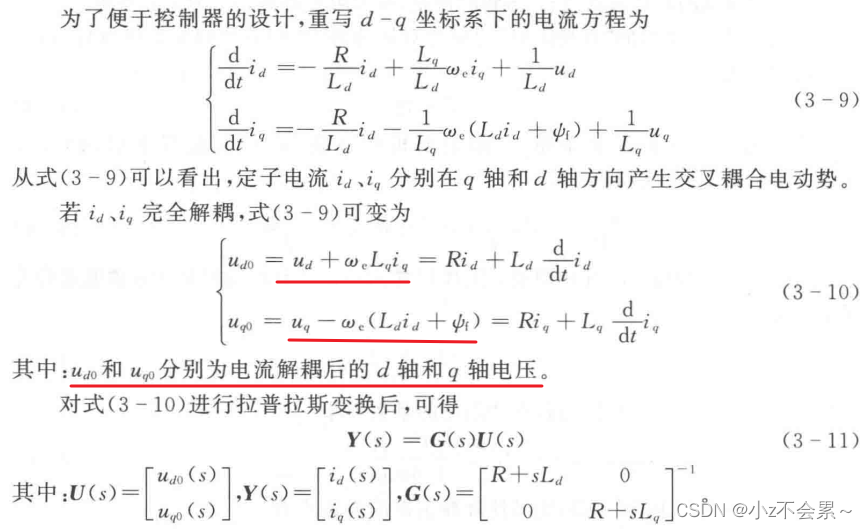
永磁同步电机定子电压方程为:
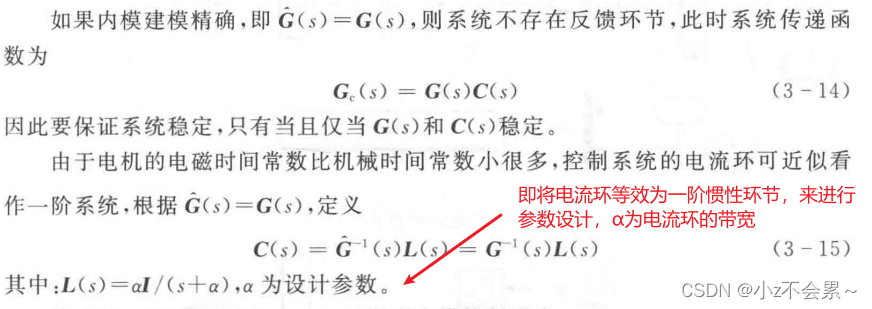
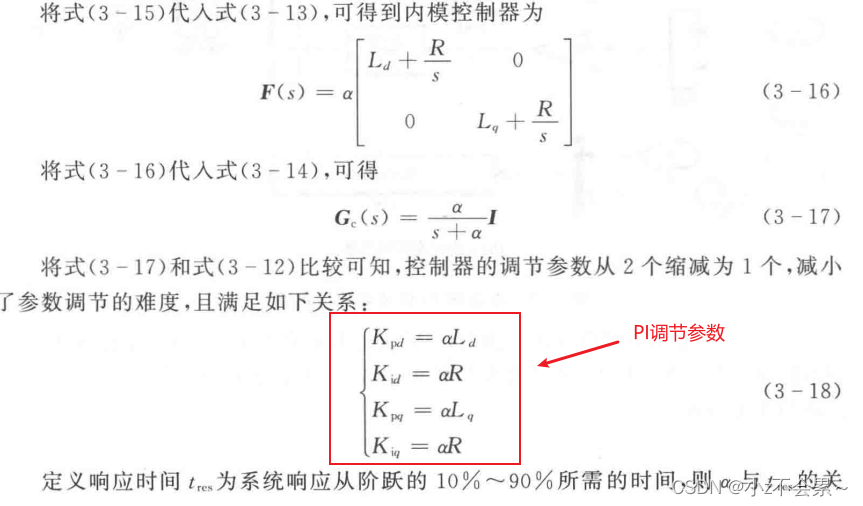
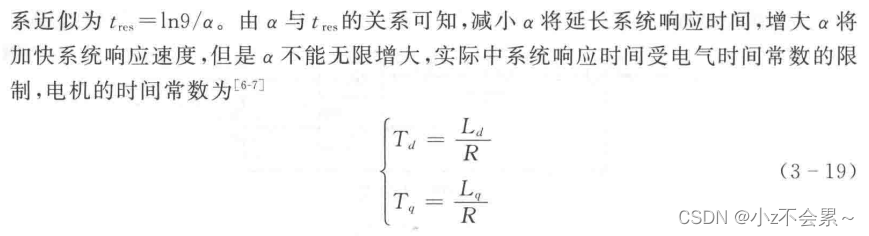
由于电流环带宽跟电机的时间常数有关系,即时间常数,带宽
。
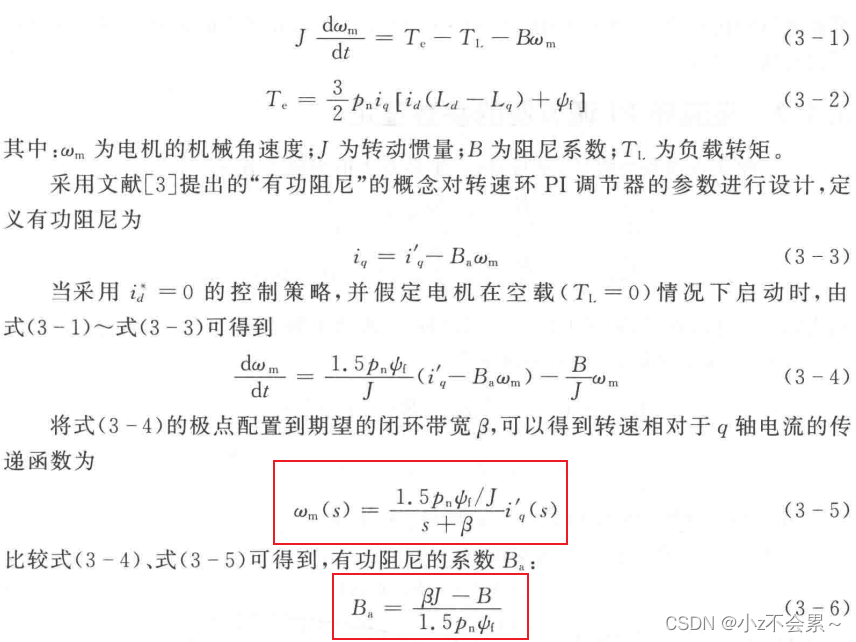
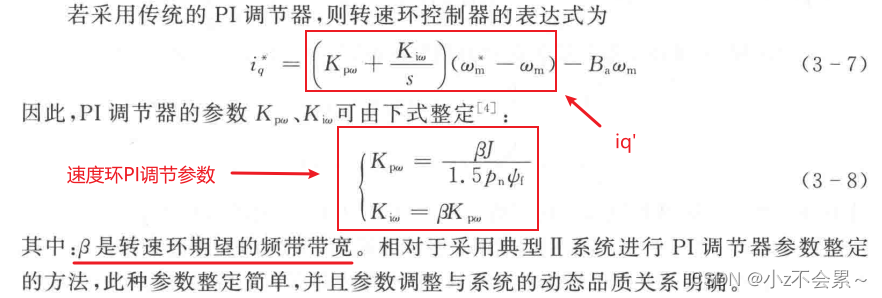
2 转速环PI调节器的参数整定
重写三相永磁同步电机的运动方程为:
 个人理解:将被控对象传递函数化为:
个人理解:将被控对象传递函数化为:
则系统开环传递函数为:
根据零极点对消原则,消掉系统的大惯性环节,最后系统近似等效为一个积分环节,而积分增益如果为1的话,系统响应太慢了,所以这里给一个积分增益,所以最后求得:
,系统开环传递函数近似为
.
3 仿真搭建
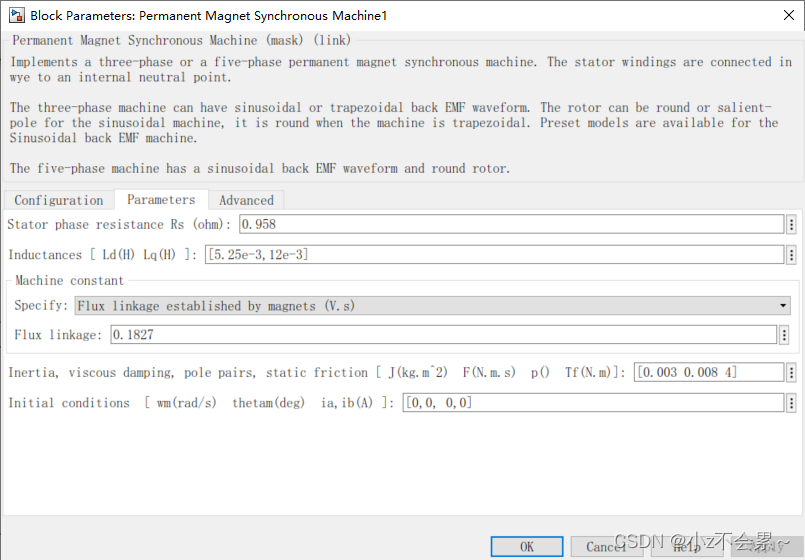
电机参数
极对数,定子电感,
,定子电阻
,磁链
,转动惯量
,阻尼系数
.仿真条件设置:直流侧电压
,载波频率
,采样周期
,采用变步长ode23tb算法,相对误差(Relative Tolerance)0.0001,仿真时间1s.
由于电流环带宽跟电机的时间常数有关系,即时间常数,带宽
。根据电机参数可以计算得到
,另外选取转速环的带宽为50rad/s,代入式(3-6)和式(3-8)可以计算得出转速环PI调节器的参数为
。值得说明的是,经过计算得出的PI调节器的参数有时并不是最优的,在仿真过程中可以对参数进行调试,以获得最优的控制效果。理论值只是做一个参考作用,实际中依旧需要根据实际效果做出调整,试凑法还是最简单有效的调节方式,理论值只是给一个较优的趋势,实际中调节参数时,可以往理论较优值靠近。
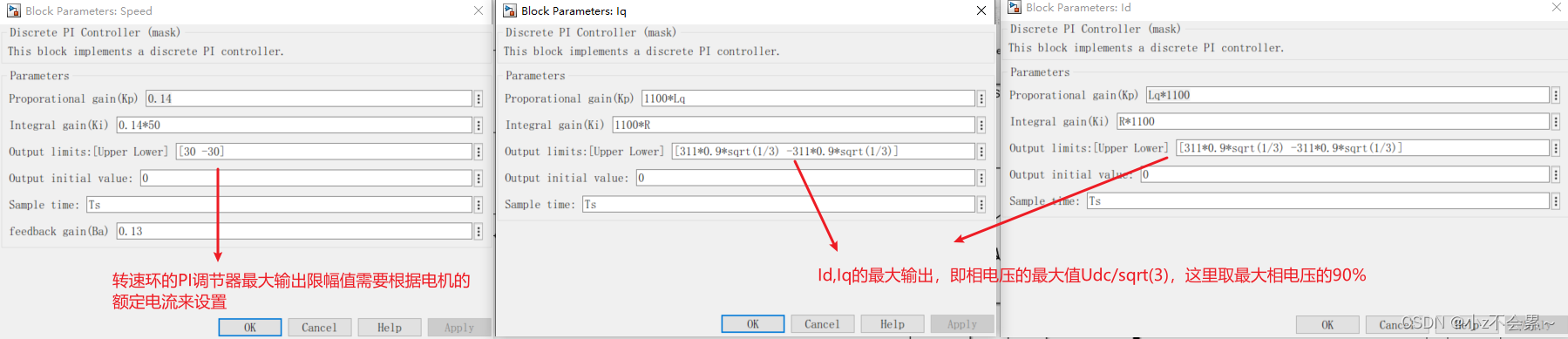
d、q轴PI调节器
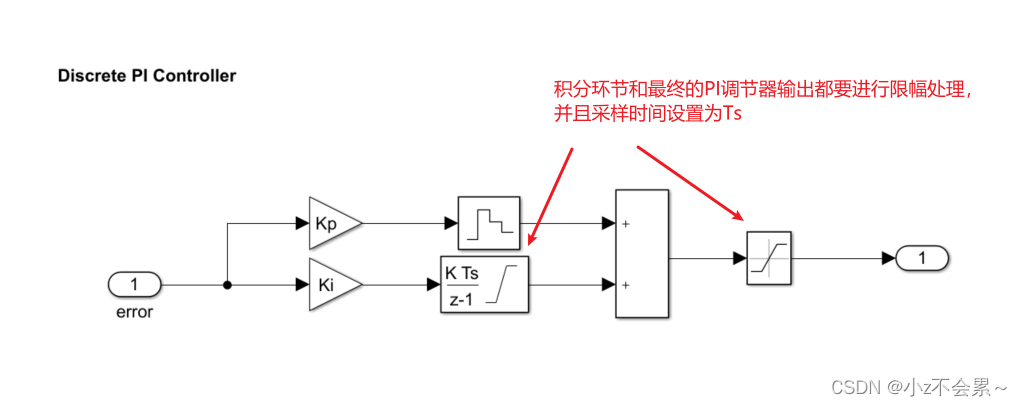
转速环PI调节器

个人理解:这个“有功阻尼”的作用是为了准确配置速度环带宽
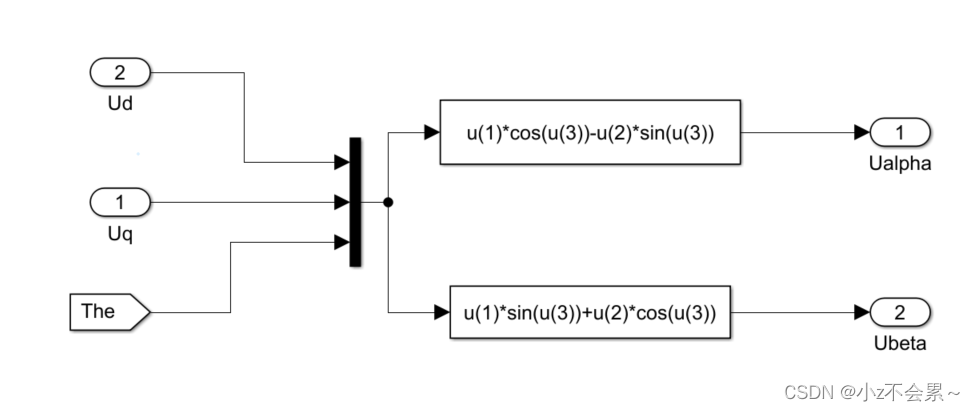
反Park变换
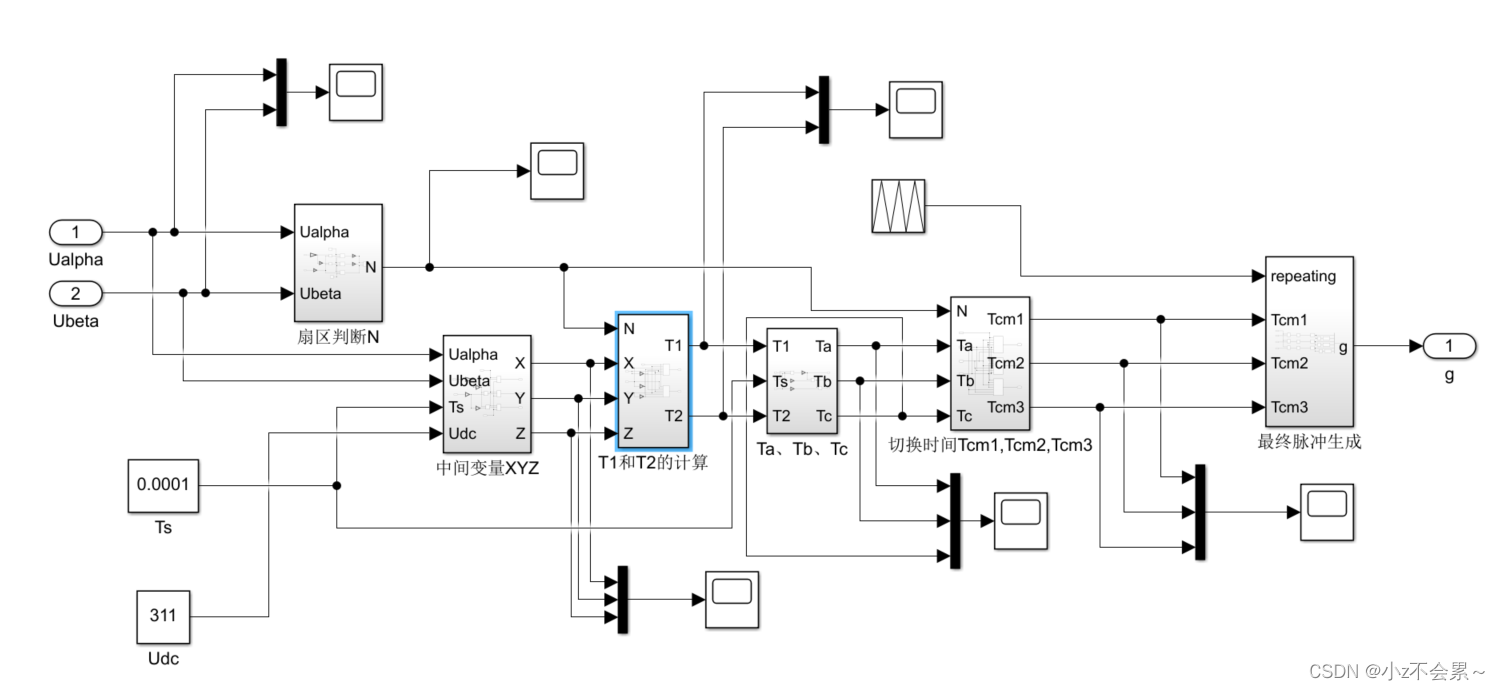
SVPWM
Clark变换

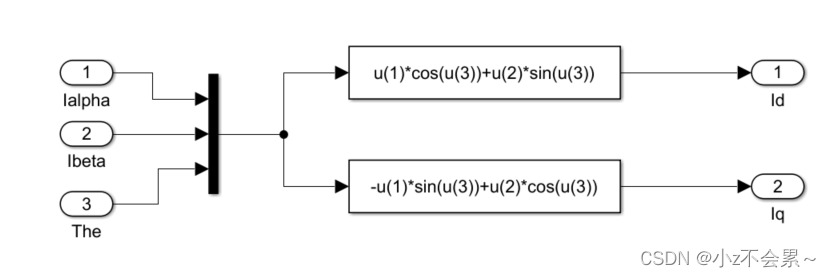
Park变换
系统整体框图
转速环和电流环PI参数调节器的参数设置
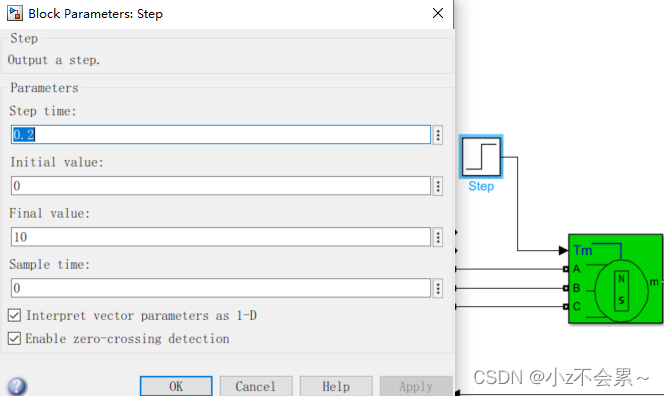
负载转矩设置
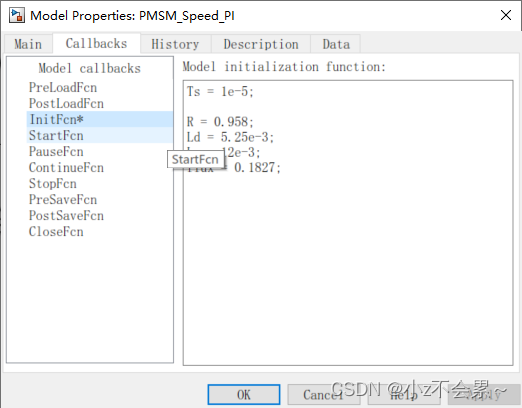
仿真模型电机参数初始化
仿真结果
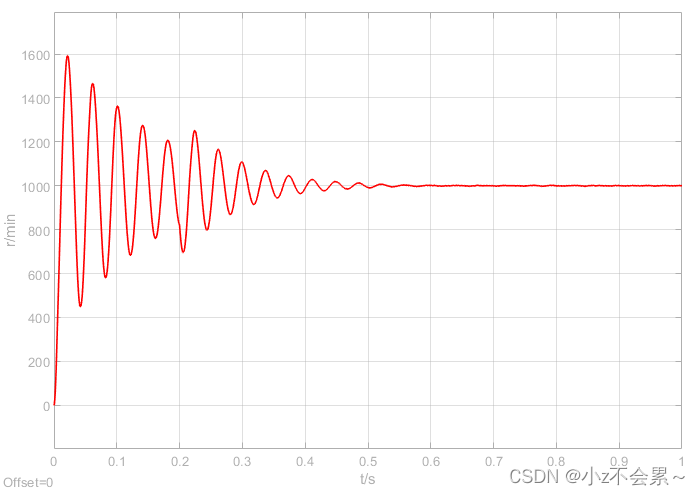
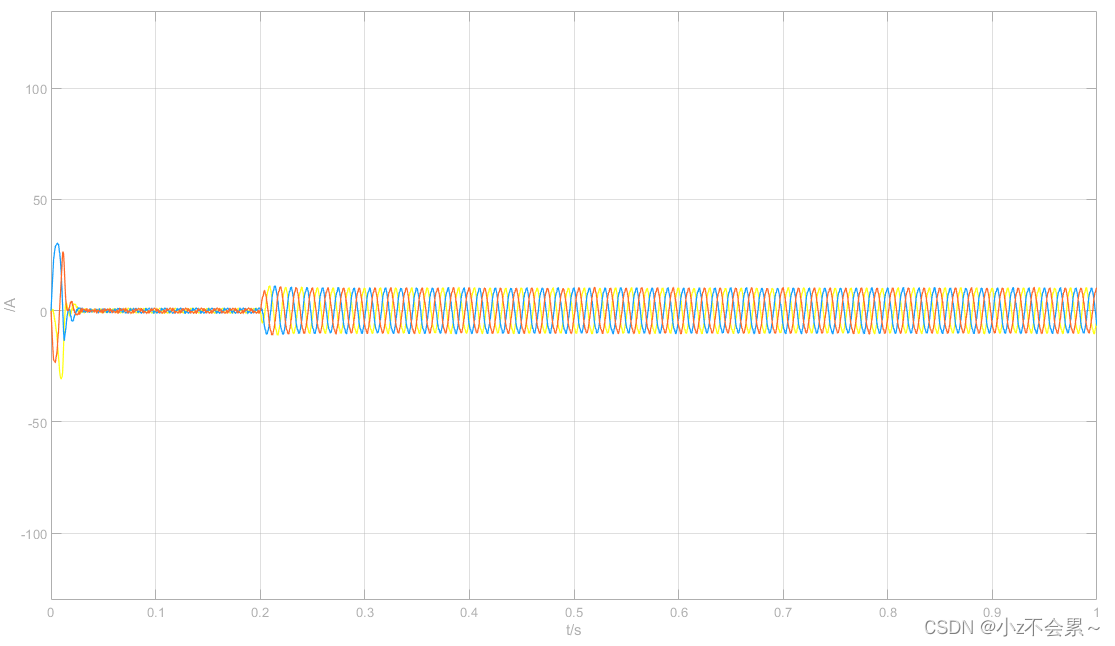
参考转速,初始时刻负载转矩
,在
时负载转矩
。观察仿真结果,我们可以看出,系统响应速度较快,但是振荡得比较严重,系统不稳定。所以我们可以调节有功阻尼增益,减小有功阻尼增益,由表达式可以看出,转速环带宽与阻尼增益成正比。根据自动控制原理可知,带宽越大,系统的快速性越好,稳定变差。
。PI参数不变。
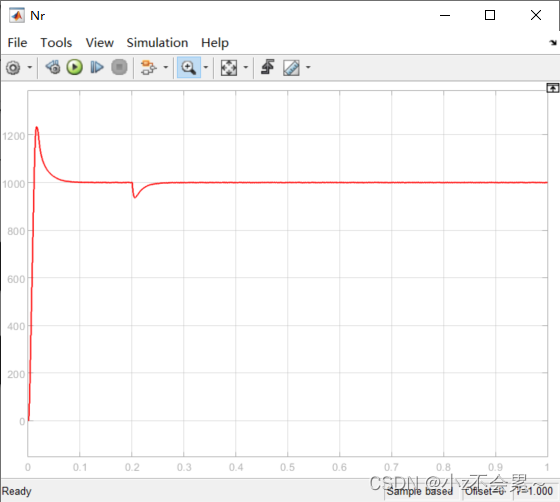
当电机从零速上升到参考转速时,虽然刚开始时电机转速有一些超调量,但仍然具有较快的动态响应速度,并且在
时突加负载转矩
,电机也能快速恢复到给定参考转速值,说明了所设计的PI调节器参数具有较好的动态性能和抗扰动能力,能够满足实际电机控制性能的需要。
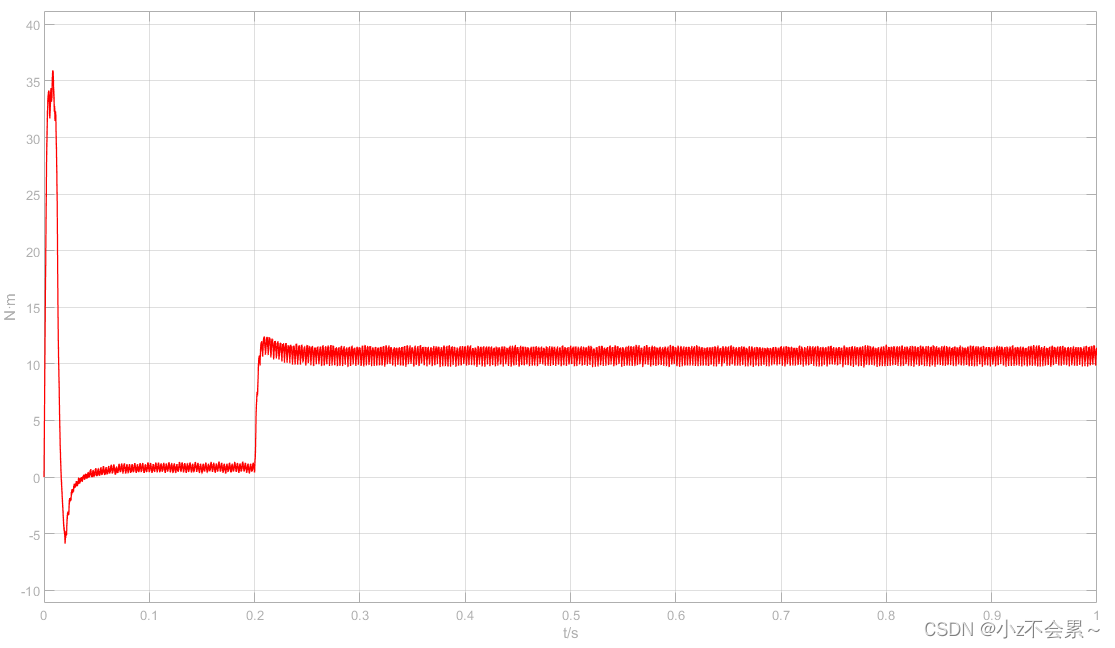
电磁转矩的变化曲线
三相电流Iabc的变化曲线
本文摘自袁雷的《现代永磁同步电机控制原理及MATLAB仿真》的第三章,自己做了一下PMSM双闭环PI控制的仿真,这里做一个记录,方便以后查阅,该参数整定方法,对实际工程调参也有一定的启发,感谢大家的阅读!!!^_^

为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐



 30
30 1
1- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)