解决ROS中运行launch文件报错ERROR: cannot launch node of type[xxx/xxx]:xxx的问题办法最全汇总
解决ROS中运行launch文件报错ERROR: cannot launch node of type[xxx/xxx]:xxx的问题办法最全汇总
·
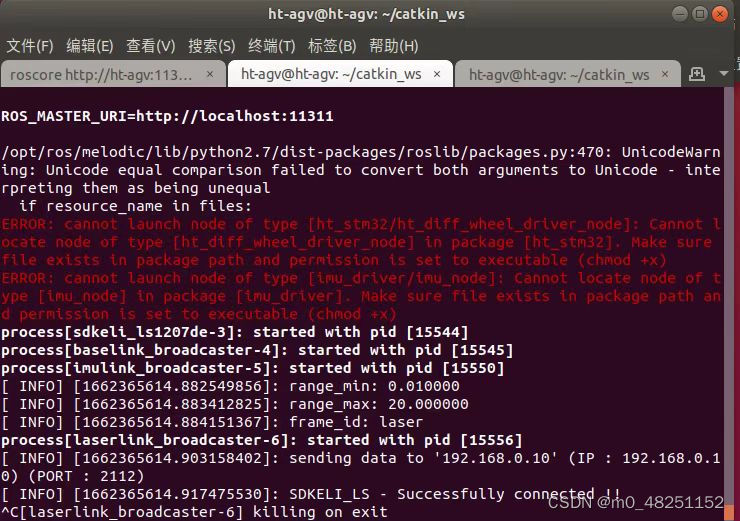
问题:
解决办法1:
下载缺少的依赖包:sudo apt-get install ros-melodic(ros版本名)-包名
解决办法2:
查看工程所有文件属性,检查权限是否为允许作为程序执行文件。

解决办法3:
也是我这个问题的解决办法。当时删除了工作空间下的build, devel文件进行了重新编译。因此导致包的先后顺序出现问题。
因此,要先编译完成上面问题的两个包,才能继续运行。
sudo catkin_make -DCATKIN_WHITELIST_PACKAGES="ht_stm32"
sudo catkin_make -DCATKIN_WHITELIST_PACKAGES="imu_driver"最后,successfully!!

为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐



 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)