【ros学习笔记】在ubuntu 20.04中安装ros的详细步骤
我的情况:我一开始是按照b站古月居的视频来安装Ros,但是由于我的ubuntu版本和视频中的不同,遇到了一些问题,本文用于记录我的安装过程及问题解决方法。我用的是ubuntu 20.04。同时,为了下载更顺利,我们要先换源。在这里插入代码片1.添加软件源:sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -
写在前面
如果此文对你有帮助的话,欢迎点赞收藏,谢谢~
如果安装过程有遇到问题,欢迎在评论区留言讨论!
我的情况:
我一开始是按照b站古月居的视频来安装Ros,但是由于我的ubuntu版本和视频中的不同,遇到了一些问题,本文用于记录我的安装过程及问题解决方法。
我用的是ubuntu 20.04。用的是虚拟机。值得注意的是,在ubuntu 20.04下,下载ros的过程中,不需要初始化rosdep。
如何你不确定自己的ubuntu版本,怎么办呢?在终端输入lsb_release -a即可
如何确定ubuntu 对应的ros版本呢?直接在csdn上搜

0.安装源:
这一步跟着视频做就可以了(点击下面链接):
确定安装源
大家可能找不到软件与更新,在ubuntu 20.04里,要想找到软件与更新,见下图:
先点击左下角的9个点,找到设置:


1.添加软件源:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.添加密钥:
$ sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
PS:以上的操作和古月居视频一样,但是接下来有要注意的地方。
3.安装ros:
sudo apt update
sudo apt install ros-noetic-desktop-full
由于我的是ubuntu 20.04,所以是noetic,大家安装的时候要选择自己对应的版本。
4.环境变量设置:
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
如果你输入错了,输入了错误的命令,举个栗子:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
解决方案是,在终端输入下列命令,这样就会打开.bashrc:
gedit ~/.bashrc
在.bashrc中,把错误的删掉即可。
5.安装rosintall
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
如果运行有问题,可以换成python2或者python
6.测试
打开一个终端,输入:
roscore
打开第二个终端,输入:
rosrun turtlesim turtlesim_node
如果在这里遇到了问题
解决方案是,在终端输入下列命令,这样就会打开.bashrc:
gedit ~/.bashrc
在bashrc文件的末端加上:
export ROS_HOSTNAME=终端电脑名称(即@与:之间部分)
export ROS_MASTER_URI=http://终端电脑名称 (即@与:之间部分):11311
举个栗子:
我的终端电脑名称是ubuntu,如下图所示:

如果还是不行的话,可以试试下面的改法:
export ROS_HOSTNAME=localhost
export ROS_MASTER_URI=http://localhost:11311
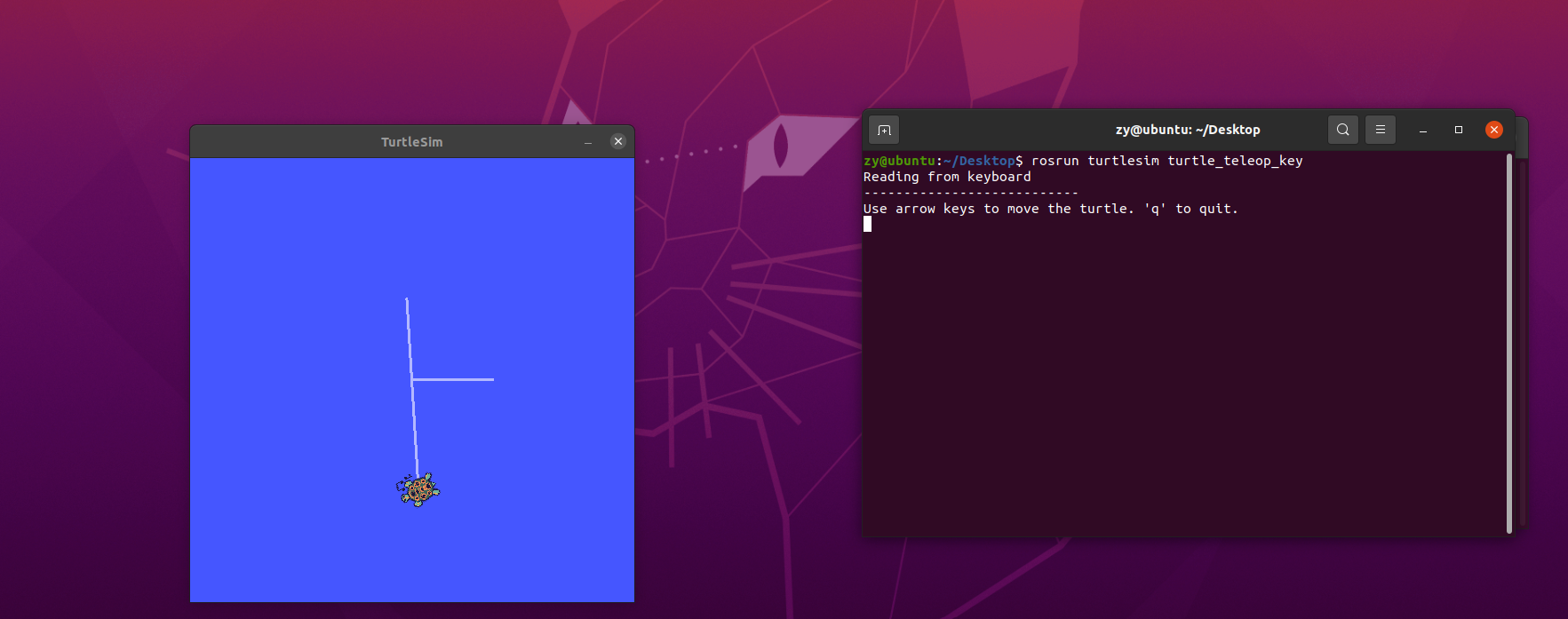
打开第三个终端,输入:
rosrun turtlesim turtle_teleop_key
然后让鼠标停在第三个终端,用上下左右键即可控制。
最终效果是:

7.解答问题:
有人问虚拟机怎么联网?
答:
看一下你的CD/DVD是不是自动检测(如果还有别的问题,可以在评论里提)


为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐



 20
20 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)