
etcd介绍
etcd介绍
etcd介绍
etcd目标是构建一个高可用的分布式键值(k-v)数据库,基于go语言实现。分布式系统中最基本最重要的问题就是各种信息的一致性,
etcd 原理
etcd设计是可靠地存储经常更新的数据提供可靠的表的查询。etcd将键值对以 前版本支持廉价的快照和监控历史事件(”time travel queries”)。
Etcd:是一个分布式的,一致的 key-value 存储,主要用途是共享配置和服务发现,Etcd 已经在很多分布式系统中得到广泛的使用。
为什么需要 Etcd ?
所有的分布式系统,都面临的一个问题是多个节点之间的数据共享问题,这个和团队协作的道理是一样的,成员可以分头干活,但总是需要共享一些必须的信息,比如谁是 leader, 都有哪些成员,依赖任务之间的顺序协调等。所以分布式系统要么自己实现一个可靠的共享存储来同步信息(比如 Elasticsearch ),要么依赖一个可靠的共享存储服务,而 Etcd 就是这样一个服务。
Etcd 提供什么能力?
1 提供存储以及获取数据的接口,它通过协议保证 Etcd 集群中的多个节点数据的强一致性。用于存储元信息以及共享配置。
2 提供监听机制,客户端可以监听某个key或者某些key的变更(v2和v3的机制不同,参看后面文章)。用于监听和推送变更
3 提供key的过期以及续约机制,客户端通过定时刷新来实现续约(v2和v3的实现机制也不一样)。用于集群监控以及服务注册发现
4 提供原子的CAS(Compare-and-Swap)和 CAD(Compare-and-Delete)支持(v2通过接口参数实现,v3通过批量事务实现)。用于分布式锁以及leader选举
Etcd 如何实现一致性的?用raft协议
1 raft通过对不同的场景(选主,日志复制)设计不同的机制,虽然降低了通用性(相对paxos),但同时也降低了复杂度,便于理解和实现。
2 raft内置的选主协议是给自己用的,用于选出主节点,理解raft的选主机制的关键在于理解raft的时钟周期以及超时机制。
3 理解 Etcd 的数据同步的关键在于理解raft的日志同步机制。
Etcd v2 与 v3
Etcd v2 和 v3 本质上是共享同一套 raft 协议代码的两个独立的应用,接口不一样,存储不一样,数据互相隔离。也就是说如果从 Etcd v2 升级到 Etcd v3,原来v2 的数据还是只能用 v2 的接口访问,v3 的接口创建的数据也只能访问通过 v3 的接口访问。所以我们按照 v2 和 v3 分别分析。
Etcd v2 存储,Watch以及过期机制
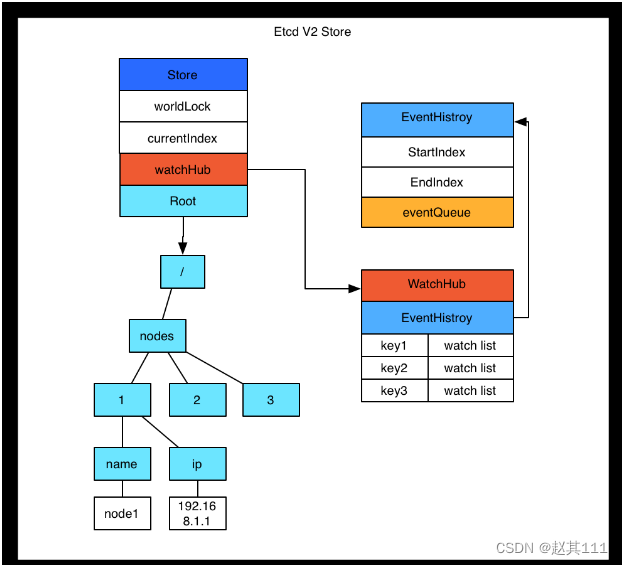
Etcd v2 是个纯内存的实现,并未实时将数据写入到磁盘,持久化机制很简单,就是将store整合序列化成json写入文件。数据在内存中是一个简单的树结构。
当客户端调用watch接口(参数中增加 wait参数)时,如果请求参数中有waitIndex,并且waitIndex 小于 currentIndex,则从 EventHistroy 表中查询index小于等于waitIndex,并且和watch key 匹配的 event,如果有数据,则直接返回。如果历史表中没有或者请求没有带 waitIndex,则放入WatchHub中,每个key会关联一个watcher列表。 当有变更操作时,变更生成的event会放入EventHistroy表中,同时通知和该key相关的watcher。
从而可以看出,Etcd v2 的一些限制:
1 过期时间只能设置到每个key上,如果多个key要保证生命周期一致则比较困难。
2 watch只能watch某一个key以及其子节点(通过参数 recursive),不能进行多个watch。
3 很难通过watch机制来实现完整的数据同步(有丢失变更的风险),所以当前的大多数使用方式是通过watch得知变更,然后通过get重新获取数据,并不完全依赖于watch的变更event。
Etcd v3 存储,Watch以及过期机制
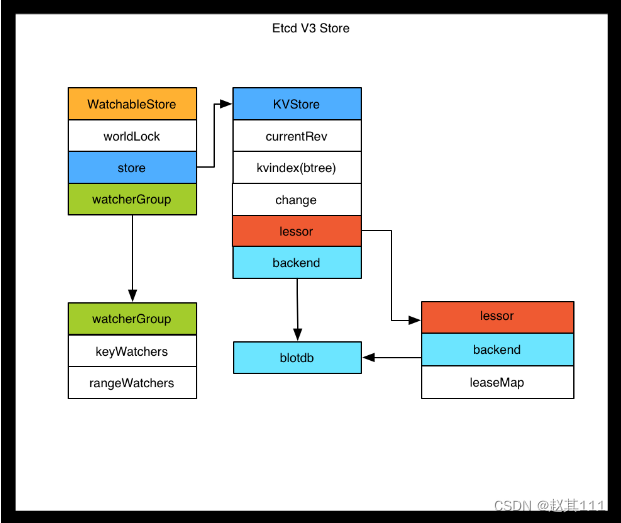
Etcd v3 store 分为两部分,一部分是内存中的索引,kvindex,是基于google开源的一个golang的btree实现的,另外一部分是后端存储。按照它的设计,backend可以对接多种存储,当前使用的boltdb。boltdb是一个单机的支持事务的kv存储,Etcd 的事务是基于boltdb的事务实现的。Etcd 在boltdb中存储的key是reversion,value是 Etcd 自己的key-value组合,也就是说 Etcd 会在boltdb中把每个版本都保存下,从而实现了多版本机制。
Etcd v3 的watch机制支持watch某个固定的key,也支持watch一个范围(可以用于模拟目录的结构的watch),所以 watchGroup 包含两种watcher,一种是 key watchers,数据结构是每个key对应一组watcher,另外一种是 range watchers, 数据结构是一个 IntervalTree(不熟悉的参看文文末链接),方便通过区间查找到对应的watcher。同时,每个 WatchableStore 包含两种 watcherGroup,一种是synced,一种是unsynced,前者表示该group的watcher数据都已经同步完毕,在等待新的变更,后者表示该group的watcher数据同步落后于当前最新变更,还在追赶。
Etcd v3 对过期机制也做了改进,过期时间设置在lease上,然后key和lease关联。这样可以实现多个key关联同一个lease id,方便设置统一的过期时间,以及实现批量续约。
相比Etcd v2, Etcd v3的一些主要变化:
1 接口通过grpc提供rpc接口,放弃了v2的http接口。优势是长连接效率提升明显,缺点是使用不如以前方便,尤其对不方便维护长连接的场景。
2 废弃了原来的目录结构,变成了纯粹的kv,用户可以通过前缀匹配模式模拟目录。
3 内存中不再保存value,同样的内存可以支持存储更多的key。
4 watch机制更稳定,基本上可以通过watch机制实现数据的完全同步。
5 提供了批量操作以及事务机制,用户可以通过批量事务请求来实现Etcd v2的CAS机制(批量事务支持if条件判断)。

为开发者提供学习成长、分享交流、生态实践、资源工具等服务,帮助开发者快速成长。
更多推荐



 0
0 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)